基于STC8单片机的净水车控制系统的设计
2020-08-03刘成恒
张 屹,刘成恒,胡 盘,徐 宁
(常州大学机械工程学院 城市轨道交通学院, 江苏 常州 213164)
0 引言
随着现在地震洪险、部队野训、牧民游牧等情况增多,户外用水安全的问题得到越来越多的关注,市面上相继诞生多款户外净水设备,这些设备为了实现运行的自动控制需要借助现在发展迅速的数字电子技术,数字电子技术已经普及到我们的生活、工作、科研、等各个领域中[1]。而这些净水设备,大多数都是简单的启动潜水泵注水进入净水组件中,完成净水工作。这些设备操作复杂,用着极其不方便,而且在对净水处理中流量的高低并不能实时的检测和控制,即使有些能实时监控,但是却不能根据流量大小实时的控制水泵运行状况,如果发生水泵吸水口堵塞和水流量过大的情况下,极易造成水泵电机的烧坏和对净水组件的破坏。而现在运用单片机为核心的控制技术,经流量传感器实时反馈的流量信号,对潜水泵实时的做出调控可以有效的解决这些问题,而且可以实现整个净水过程的全自动化,使得净水车工作运行稳定,操作方便,而且可以提高净水的效率。同时也因控制潜水泵不全时全功率运行,降低了功耗,防止流量过大净水效果不达标的缺陷,也提高了净水设备组件的使用寿命,对净水车的安全稳定工作有很大的意义。
1 净水车的结构与水处理工艺
车体的结构设计主要包括如下几个方面:1)车体的底盘结构设计,保证车子在工作时的稳定性;2)车体的外框,要保证其内部具有一定的保温性能且质量不能太重;3)水处理系统工艺,根据设计的水处理工艺图,合理的排布管道的来连接,保证其工作效率尽可能的高。如图1为车体的整体结构图。

图1 整体结构图
为了实现净水功能并且要处理效率高、系统运行稳定、水净化质量高等,就要把这些净水设备根据其特定的作用功能来组装、配合起来使用。根据设计我们设计如下净水的工艺流程,具体净水工艺原理如图2所示。
2 硬件设计
2.1 系统总体控制方案
因 SCT8系列单片机具有超强抗干扰、超低价、高可靠、高速、低功耗等优点[2-3],所以净水车控制系统的设计选用的是STC8A8K64A12单片机为主控制核心,液位传感器、流量传感器为单片机提供信号信息支持,并由单片机在数据处理之后发送执行指令给执行机构,供其完成相应工作,触摸屏(人机交互)可显示各种参数实时信息并可通过触摸屏给单片机发送指令,以便用于手动调试或者检查故障。在系统出现不正常情况后,可以发出声光报警,紧急停止系统运行。其总体方案设计框架如图3所示。
其工作流程是:在系统通电后,启动净水车开始按钮,液位传感器首先要采集净水车水箱中液位状况,当液位处于高液位以下时,液位传感器发送低液位信号,经过I/V、A/D转换器将采集的模拟信号转化为数字信号传送入单片机,经单片机计算分析后判断是否要为水箱补水,在计算后要补水时启动潜水泵、并打开净水管道中的电磁阀开始制水工作,净化完成的水流向储水箱。在制水的过程中,管道中的流量传感器启动,实时监控水的流量大小,并实时传送数据给单片机,经单片机判断是否在预设的安全范围内,如果数值正常则继续工作,否则将报警并判断其故障,如果是流量值超过500 L/H,则给潜水泵将频降速,使其处于安全范围内工作,如果是数值小于50 L/H,则停止工作,人工去检查是否因为潜水泵被水草、垃圾堵塞,并处理故障。在水箱水位高于65 cm时,则提示用户无须补水,同时启动生活用水水泵,为用户提供水源。
2.2 部分硬件电路的设计
2.2.1 液位模块
在液位测量中有各式各样的测量方法,比如,浮标测量法、三段式测量法、超声波反射法、电容式液位测量法、电阻应力片的压力感应法等等,而采用压力式传感器和单片机相结合的方法可以大大的提高测试精度、可靠性和稳定性,方便对整个采集过程及其控制过程实现自动化[4]。压力式传感器的测量原理如图4所示。
当水箱上面透气时,其测量基准面上的压力的计算数学模型如下:
P=ρgh=ρg(h1+h2)
(1)
式中,P为测量基准面的压力;ρ为液体密度;g为重力加速度,取9.8 N/kg;h为液面到测量基准面的高度;h1为高液位和低液位高度差;h2为低液位与测量基准面的高度差。
根据实际需求我们需要测量h的高度,由公式可知,基准面的压力与高液位h成正比,知道得到压力数值就可以计算出液位的高度。设计在液位高于65 cm时为单片机提供报警信号。其设计液位电路如图5所示。
2.2.2 流量模块
净水车在工作的时候,需要根据流量的大小控制潜水泵运行速率,实现在流量高于500 L/H时降频,以保证净水设备的安全运行,流量在低于50 L/H时停止工作,检查潜水泵是否堵塞或者其他安全隐患。为了保证在制水是能够得到准确的流量数值,我们选用涡街流量计,这种流量计结构简单,性能可靠不易损坏,而且测量精度高、压力损失小特别适合用在净水车进水口测量进水流量[5],涡街流量计的工作原理是在液体流经涡街流量计时,由于在流量计内部装有一个漩涡发生器,当液体流经漩涡发生器时,两侧会产生交替漩涡,漩涡不断产生和分离,在漩涡发生体下游便形成了两列漩涡,其产生的漩涡频率和流量是成正比的关系[6]。液体的流速和发生体的宽度直接影响漩涡的频率[7-8]。其数学公式为:
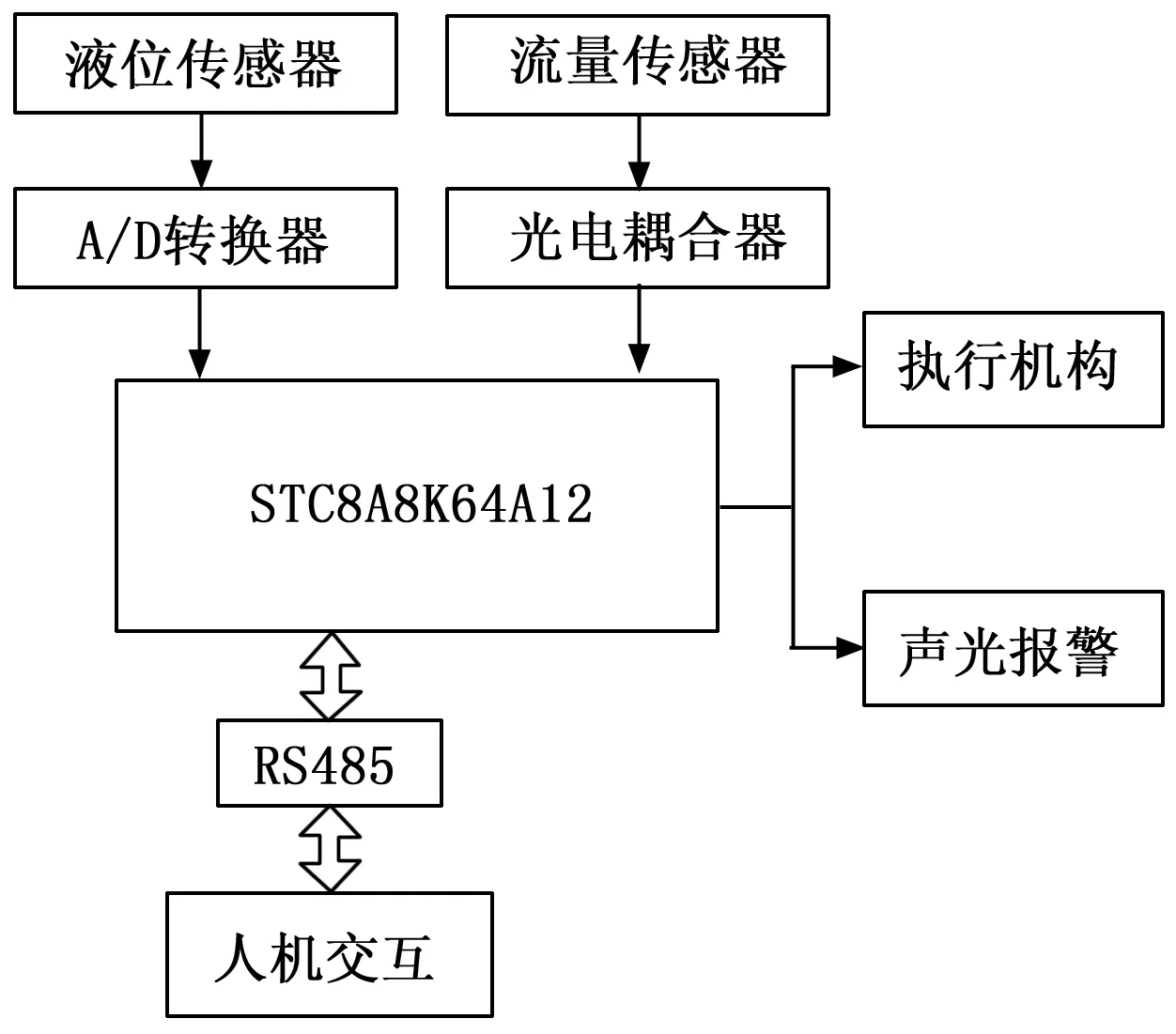
图3 总体方案设计框架图
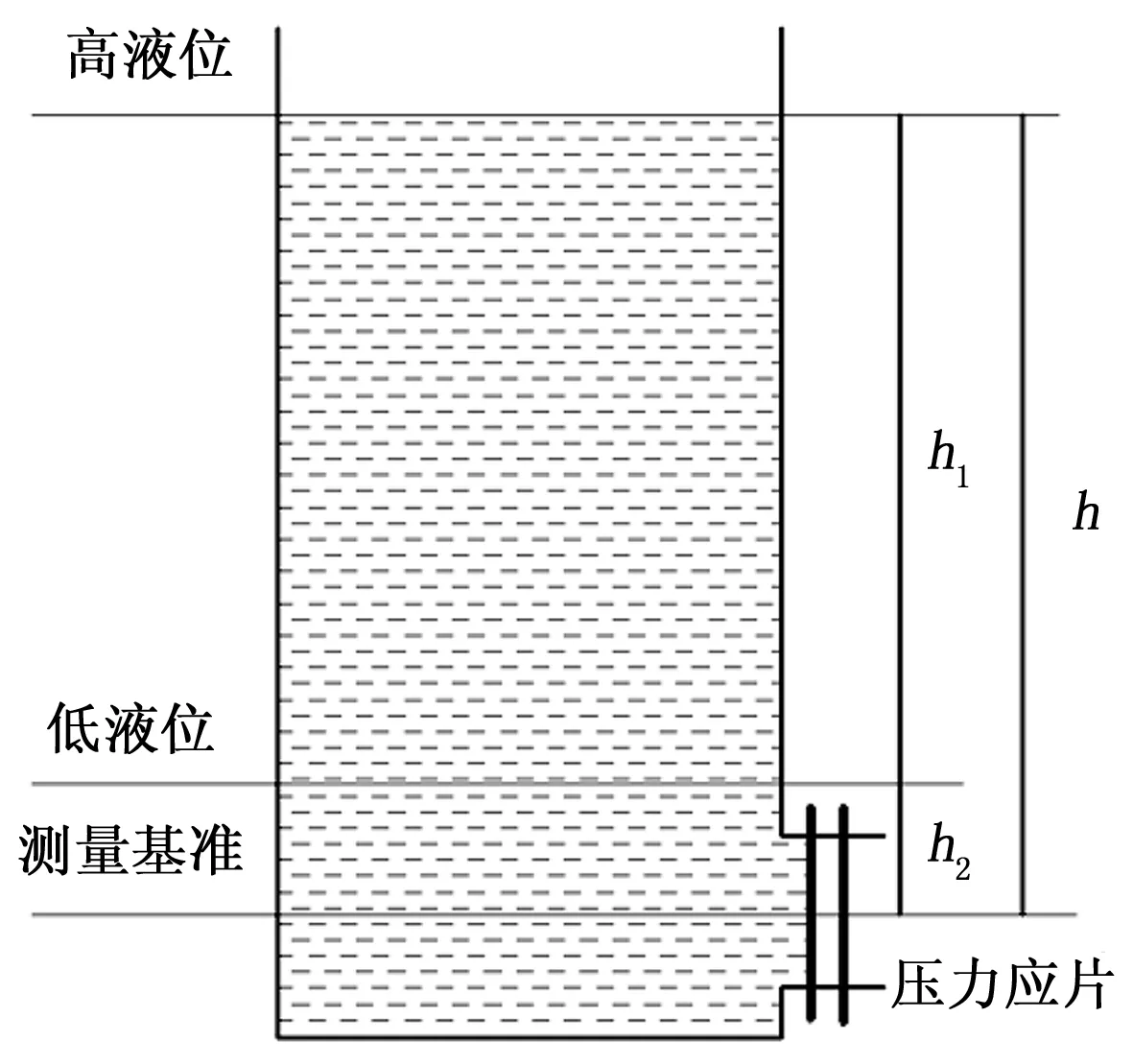
图4 液位示意图
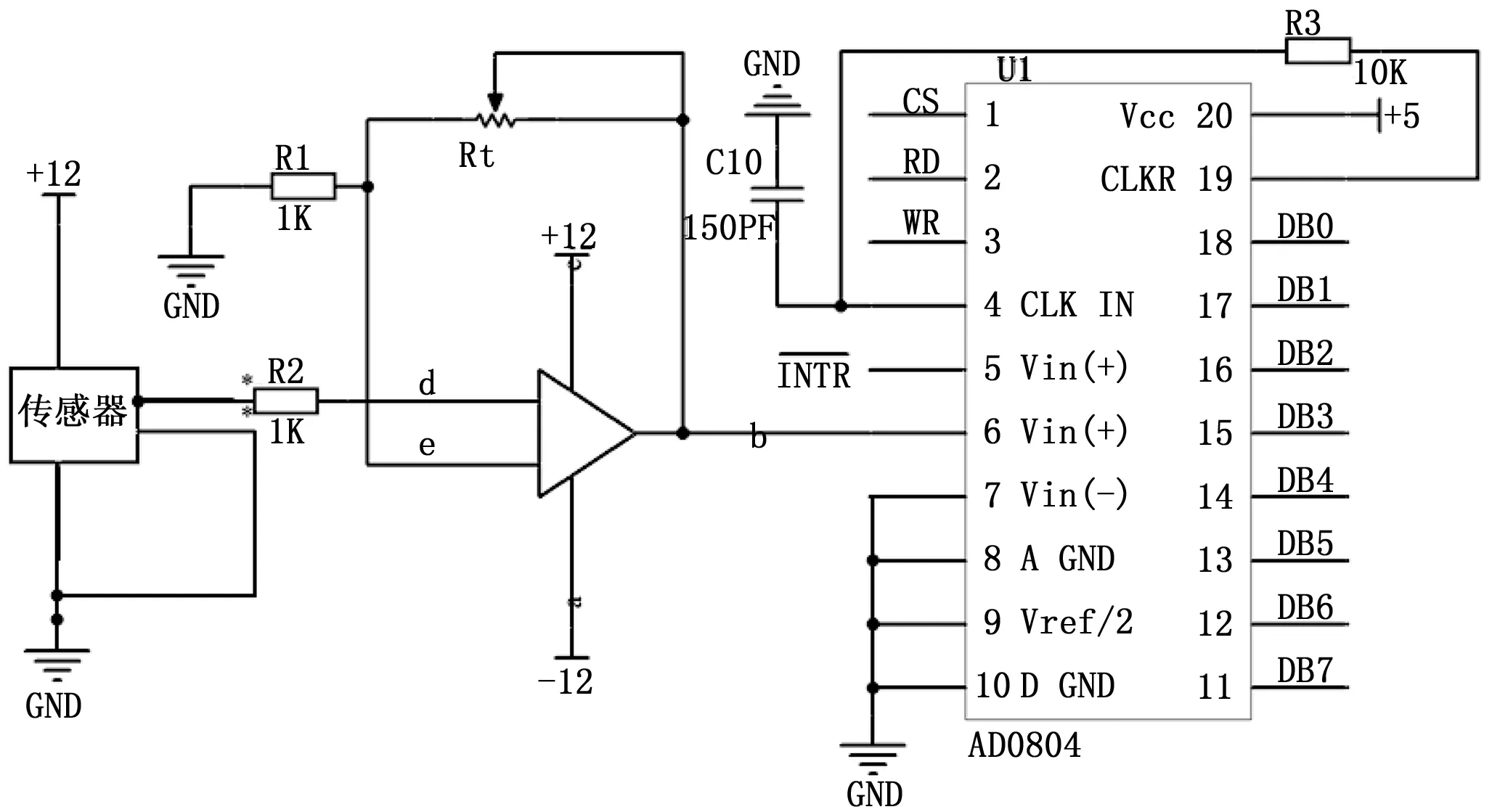
图5 液位电路图
(2)
(3)
因此,在根据公式(3)公式中的涡流频率求出流体速度后,再根据公式(2)就可以求出液体的流量q:
q=VA
(4)
式中,q为液体的流量,单位为m3/s;A为漩涡发生体的截面积,单位为m2。
1)定时器获取脉冲频率:
通过STC单片机的定时器T0对流量计输出的脉冲的采集,来测量脉冲宽度或者频率。其工作过程简单的说就是通过检测定时器上的边沿信号,将定时器的输入捕获功能采集到的上升沿或者下降沿跳变信号自动的保存到定时器的寄存器中,定时器完成一次捕获过程[9]。数学模型如下:
fck=Tclk/(PSC+1)
(5)
Tout=(ARR+1)(PSC+1)/Tclk6 (6)
式中,fck为计数频率值,单位Hz;Tclk为定时器时钟频率,单位Hz;PSC为预分频系数,无量纲,本次设计值为84;Tout为定时器溢出时间,单位s;ARR为自动重装载值,无量纲,本次设计值OXFFFFFFFF。
(7)
式中,Tcap为捕获一次电脉冲的周期s;Vcnt为定时器计较值;n为定时器溢出次数。
根据净水车的实际需求,选择了华海测控公司的Foctur DN15的流量计。这种流量计测量精确度高、运行稳定、结构简单,测量范围也满足净水车测流量的实际需求,而且价格实惠,并有良好的重复性,短期重复性可达0.05%~0.2%,完全满足我们使用要求。
2)光电耦合器的选择:
由于涡街流量计输出的是模拟信号,我们的可移动净水车又是在户外工作,环境变化大、干扰多,对信号造成干扰,导致测量不精准,系统运行不稳定,因此我们需要选用光电耦合器来解决这些问题。通过对光电耦合器的性能分析我们选用型号为TLP521-1的光电耦合器。它将分离出来的脉冲信号传入到STC8单片机的定时器T0,(P3.4)引脚上,TLP521-1芯片的工作过程:当输入的电信号时,内部的发光二极管发出一定波长的光,在被光探测器接收而产生光电流,再经过进一步放大后输出,可以有效的消除外界的干扰。
3)流量控制电路设计:
为了保证净水车在工作的时候能够测到精确的流量,需要设计测量流量的硬件电路,线路链接如图6所示。
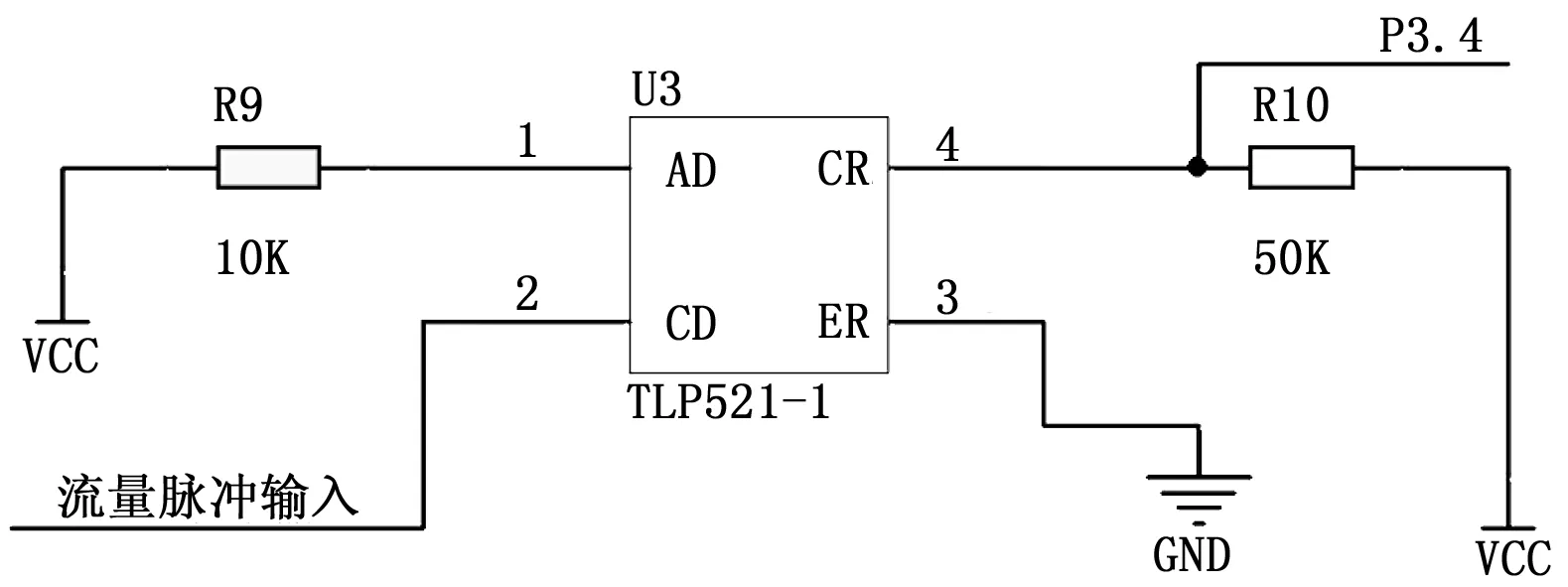
图6 流量测试电路设计图
2.2.3 上机位通信接口设计
净水车在工作时,不光需要单片机实时的发送流量、压力、水质等各种数据给显示屏显示,还要有触摸显示屏控制水处理中各种电器元件的启停,因此,我们采用常用的RS485通信连通显示屏和单片机之间的通信。
1) RS485通信的简介:
RS485总线有两根组成,为半双工串行通信方式,传输速率快距离远,经常使用在点对点网络中,支持线性,总线型,但不能是星型[10]。RS485采用差分信号,扛共模干扰优势明显,特别适合用于野外或者工业环境复杂,干扰多的地方,因净水车长时间都是在野外工作,所以选用这种通讯方式最为合理。RS485要与单片机的UART串口连接起来,需要一个转化器,并且使用完全相同的异步串行通信协议。这里我们选用芯片SP3485作为数据收发器。SP3485作为一个半双工收发器,数据传送快,运行功率低,同时还拥有低功耗关断模式[11-13]。
2) RS485硬件电路图:
选用技术成熟的RS485总线作为通讯方式离不开一套稳定的硬件结构,硬件电路图设计如图7所示,RXD3_485与单片机P5.5引脚相连,TXD3_485与单片机P5.1引脚相连,485_CS与单片机P3.6引脚相连,该信号用来控制SP2485的工作模式,其工作模式是高电平为发送模式,低电平为接受模式。
2.2.4 触摸屏模块
本次设计我们选用的是MCGS公司生产的型号为TPC7062KS的触摸组态屏,本款产品基于Windows平台,串口通信,指令丰富,开发简单。并支持电容式触摸、语音播放等功能,可自定义图形数据库,灵活设计页面,运行稳定、可靠等优点,可完成现场数据采集与监控,前端数据处理与控制。实体如图8所示。
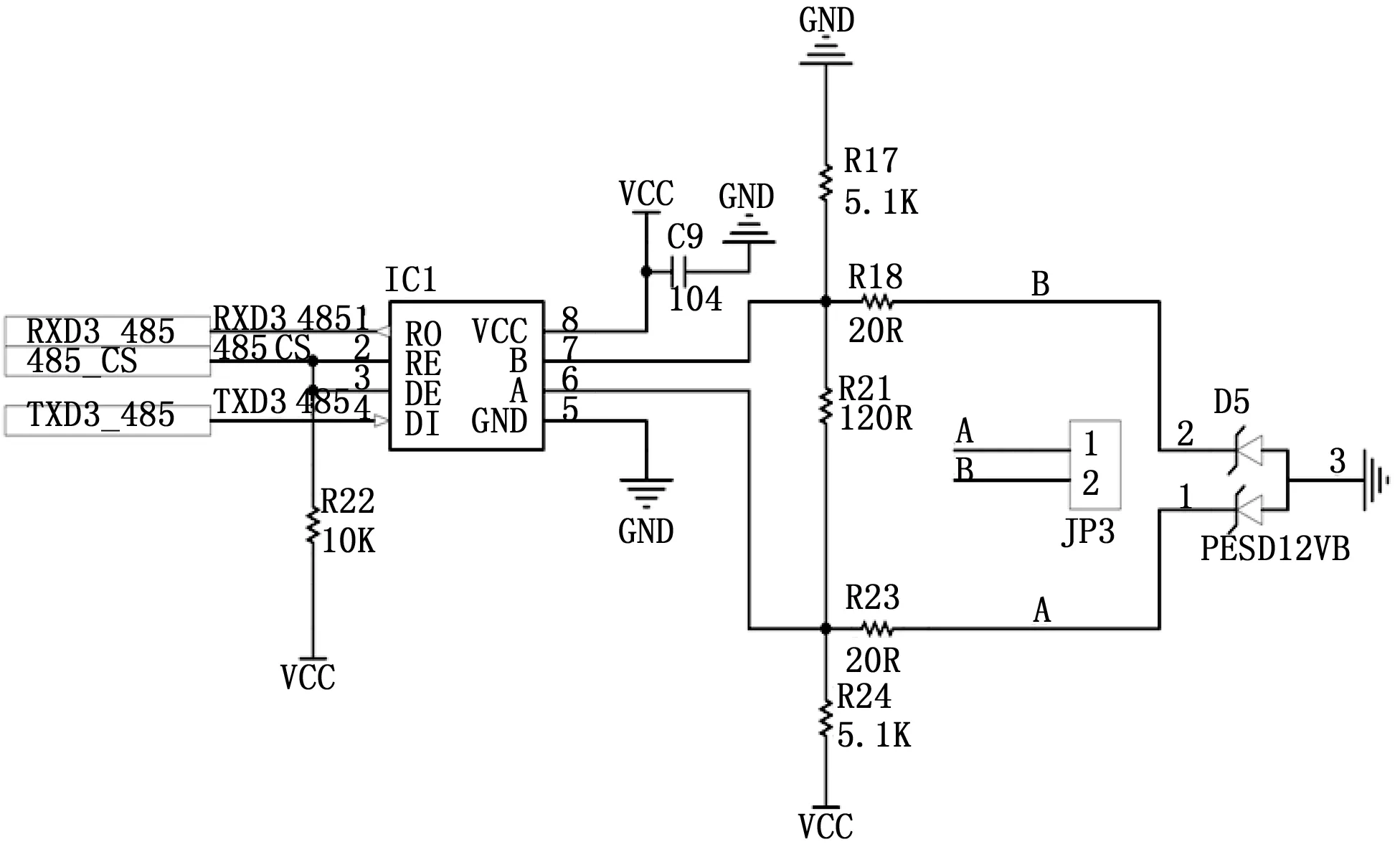
图7 RS485硬件电路图

图8 触摸屏实体图
2.2.5 报警模块
控制系统在运行离不开报警系统的设计,在系统出现问题时报警系统能及时的挽回损失。本次设计报警采用灯光加蜂鸣器的报警装置,当检测到流量处于极低或者超出设定的阈值启动报警信号,报警电路如图9。当P1.4为低电平时,红色发光二极管通电启动,同时P1.6为高电平,蜂鸣器发出鸣叫。

图9 报警电路
3 软件的设计

图10 程序设计流程图
根据可移动净水车控制系统的需求,程序控制流程图如图10所示。程序采用C语言进行设计,主要包括液位判断模块、流量判断模块、RS485通讯模块、触摸屏模块和报警模块。系统通电启动后,首先程序初始化,然后检测系统的各个参数状态,同时水箱中的液位计给单片机传送液位状态的信号,如果液位处于高液位,说明水箱中不需要补水,可启动生活供水泵为用户供水,如果检测到水箱中液位处于低液位状态,则启动潜水泵工作,水流经流量传感器,流量传感器做数据采集,产生的流量电脉冲送给单片机做数据处理,把处理后的流量数值实时显示在触摸屏中以便观察,同时单片机判断流量是否超限,超限则输出报警信号并降低潜水泵功率,待流量数值正常后,系统持续工作,等到液位到达高液位时则启动饮用水水泵。

表1 三处水源测试结果
4 实验结果与分析
为仿真净水车真实运行的状态,我们需要设置三处水源对系统进行测试,三处水源要求为:水源1处水质清质,无明显颗粒物;水源2处水质一般,清晰可见水质混浊;水源3处,水草杂多,极易造成潜水泵堵塞。净水组件其最大能承受的水处理量500 L/h。其测试数据及结果如表1所示。
由表中数据分析:当在水源1处时,液位处于10 cm时,净水车正常工作,由于水质较为清澈,所以在水经过净水设备时阻力很小造成了流量过大,会导致净水的效果不好,所以单片机会控制水泵的工作频率,降低出水流量,来保证水质的良好,在液位到达最高液位65 cm时,泵停止了工作。当在水源2处时,做同样的测试,发现在流量无超载无极低的情况下,泵正常工作,净水车工作稳定,在高液位时自动停止运行。流量由高到低缓慢减小的原因是净水设备随着时间的推移会发生一定的微堵塞情况,并不是水泵降频所导致的只要后期清洗一下净水设备就可恢复正常。水源3处,由于水草杂多,导致水泵工作没有多久就造成堵塞,流量急剧下降,当低于我们程序设定值时,系统发出报警,水泵停止工作。
由数据分析结果可知,净水车这套基于STC8系列单片机开发的控制系统是可行的,足以保证净水车在工作时稳定安全的运行,为用户提供完美的体验。
5 结束语
本文阐述了以STC8A8K64A12单片机为核心的净水车控制系统的设计,通过对液位状态、流量高低的判断,智能的控制净水过程,相较于其他净水产品,本次设计的控制系统可以有效的提高净水的效率,提高净水的质量,也对净水车本身的稳定运行提供了安全保障。但是也有许多待完善之处,比如开发一套水质采集系统,实时的为国家水质局提供各地的水质状况,便于统计和研究各地水质情况,希望以后可以得到改进。
