车载激光甲烷遥测系统的设计
2020-08-03郭东歌陈海永贾林涛郑国锋冯山虎武传伟
郭东歌,陈海永,贾林涛,郑国锋,冯山虎,武传伟
(汉威科技集团股份有限公司,郑州 450001)
0 引言
随着国家“西气东输”等战略方案的实施,我国天然气管道传输行业规模不断扩大,输配气站不断增加,为避免发生严重的安全事故,天然气管道泄漏隐患排查工作至关重要。如何及时发现泄漏,并采取措施,将损失降低到最小,把事故防患于未然,是燃气输配管网管理上的首要问题。对管线分布范围广、路线长的燃气管网巡检,关键在于快速、高效的发现潜在的泄漏点,所以研制高性能、快速巡检设备对燃气输配安全有着重要意义。
近年来,可调谐激光吸收光谱技术(tunable diode laser absorption spectroscopy, TDLAS)飞速发展,其采用可调谐二极管激光器为检测光源,利用激光的窄带宽和波长随注入电流改变的特性,扫描待测气体的特征吸收线,提取二次谐波分量来实现对气体浓度的测量[1-4]。该技术与传统的半导体[5]、电化学[6]、红外[7]等技术相比,具有响应速度快、灵敏度高、抗干扰能力强、非接触测量、防爆及抗电磁干扰强等优点,非常适合车载巡检设备快速、高效的需要[8-10]。
目前市面上的开放式车载激光巡检仪[11]和泵吸式车载激光巡检仪[8],均为基于TDLAS技术的车载激光快速巡检系统,其采用多次反射腔体,光程长,灵敏度高,但由于其需要将气体抽取到多次反射腔体内进行检测,检测距离受气体扩散和泵流量大小的限制,检测距离近,无法检测道路两旁绿化带及其他车辆或人员无法靠近区域的甲烷气体泄漏。本文研制了一套车载激光甲烷遥测系统,弥补了上述两种车载激光巡检仪的缺点,可以实现远程遥测,检测距离达150米,能够迅速准确地获取燃气管道漏点位置及泄漏的甲烷气体含量。
1 基本原理
TDLAS技术基于比尔-朗伯定律,出射光强I与入射光强I0和气体的体积分数之间的关系为[2,12]:
I=I0exp[-α(v)CL]
(1)
其中:α(ν)为气体吸收系数,气体在一定频率ν处的吸收线型;L为光通过待测气体的有效光程;C为气体的浓度。通过检测出射光强和入射光强,就可以得到气体的浓度。
激光遥测光学系统是利用地物的空间反射特性。其接收到的光功率大小不仅取决于光源的性质、地表的反射特性,重要的是遥测光学系统的设计。激光遥测光学系统为激光出射与接收系统同轴,根据文献[13]推导出的非朗伯体后向散射透镜接收到的光功率为:
(2)
式(2)中,Pi为激光器出射光功率,θ为入射光与背景散射物的夹角,ρtot为背景散射物的反射率,r为收集透镜的半径,l为收集透镜距离背景散射物的距离。由式(2)可以看到,探测器接收到的光功率Pr正比于激光器输出功率Pi,收集透镜的尺寸r2和背景散射物的反射率为ρtot,反比于收集透镜距离背景反射物的距离l2。
图1 非朗伯体后向散射光功率分布示意图
当激光器的波长调制在气体吸收峰上时,激光遥测光学系统接收到的光功率变化可以用下式来表述:
P=K×S×exp[-α(v)2CL]≈
K×S×[1-α(v)2CL]
(3)
式(3)中,P为接收到的光功率,K为收集效率,S为激光器发射光功率,系数2代表激光往返两次通过测量气体,实际吸收光程增加了一倍[13]。
接收到的回波信号经过锁相滤波后,解调出的一次谐波和二次谐波的幅值可分别表示为:
P1f=K×SdcmAM
(4)
P2f=K×Sdchα(v)×2CL
(5)
式(4)~(5)中,Sdc与mAM分别为DFB激光器的初始输出的直流分量与振幅调制率,h为基于调制深度的调制系数。P2f与P1f的比值可消除收集效率对积分浓度的影响[14]。
(6)
从式(6)可以看出,通过计算反射回来的激光束的二次谐波与一次谐波的比值,就可以换算出泄漏甲烷气体的积分浓度(甲烷气体浓度和光学深度的乘积)[2]。
2 系统硬件设计
该车载激光甲烷遥测系统主要包括:激光甲烷遥测仪(以下简称遥测仪)、云台摄像机、供电系统、平板电脑及远程监控中心,遥测仪和云台摄像机集成在一起,如图2所示。其中遥测仪为整个系统的核心,用于检测甲烷气体泄漏;云台摄像机包括车载云台、200万高清光学变焦摄像机及WIFI模块。供电系统为整个系统供电,为汽车电瓶或者蓄电池。

图2 车载激光甲烷遥测系统组成图
其工作过程为:遥测仪搭载云台摄像机,安装于巡检车顶部,遥测仪的检测数据和云台摄像机拍摄的检测视频分别通过蓝牙和WIFI模块传送给平板电脑。平板电脑再通过4G模块传送给远程监控中心,便于燃气巡检人员远程监控,并对数据的统计和分析。平板电脑通过WIFI控制云台转动,控制遥测仪检测方位。
2.1 激光甲烷遥测仪
激光甲烷遥测仪是整个系统的核心,由激光收发光学系统、信号处理单元、激光器控制单元和光电探测单元组成,原理如图3所示。
图3 激光甲烷遥测仪原理图
2.1.1 激光收发光学系统
激光收发光学系统包括检测激光准直系统、光纤分路器、接收透镜及接收光学系统。激光器经过1%:99%的光纤分路器,99%的激光通过光纤准直器从透镜中心出射,作为检测光。1%的激光输入参考探测模块,通过密封有甲烷气体的气瓶后由参考InGaAs探测器接收。透镜的顶端固定有瞄准激光,该瞄准激光束与检测激光束平行,用来指示检测激光的位置。接收光学系统为一组平凸透镜、滤光片、光电探测器等组成的,放置在接收透镜的焦点附近,用于接收尽量多的散射回光,并转换成用于计算的电压信号。
2.1.2 信号处理单元
图4 LTC1923恒温控制电路图
信号处理单元主要由DSP信号处理、微处理器、AD和DA转换模块组成,如图3所示。激光器调制信号由DSP产生,经DA转换为模拟信号后输入激光器驱动电路。主探测单元和参考探测单元将接收的光信号转换为电压信号后,经过模拟开关、AD转换后,由DSP进行锁相滤波计算,提取二次谐波,最后得到气体浓度信息。参考探测模块用于将DFB激光器的波长实时锁定在甲烷气体的吸收峰上,保证整个系统的测量灵敏度。本系统激光器的驱动信号斜波叠加正弦波信号。
2.1.3 激光器控制单元
激光器控制单元包括DFB半导体激光器及其驱动电路、恒温控制电路、瞄准激光光源。本系统的DFB激光器选用进口的日本NTT Electronics公司的激光器;温度控制芯片选用LTC1923;瞄准激光光源选用波长为532 nm的绿色激光光源。
激光器恒温控制电路,采用负反馈。恒温控制时,首先扫描一个宽的温度范围,确定激光器波长正处于气体的吸收峰时的温度值,再由微处理器记录这个温度对应电压的数字量,该电压值为设定电压值,其与激光器内部热敏电阻反馈的电压值,输入运算放大器比较后,传给温度控制芯片,从而控制内部TEC上的电流大小及方向,对DFB激光器加热和制冷,使DFB激光器管芯稳定在设定的温度[15],电路如图4所示。本文根据HITRAN数据库查询的数据,选择了CH4的2v3带1653.7 nm的吸收峰。
2.1.4 光电探测单元
光电探测单元包括InGaAs光电探测器、前置放大和滤波电路。将InGaAs光电探测器接收到的带有气体浓度信息的光信号,转换为电压信号,电路如图5所示。InGaAs光电探测器的响应度为0.95 A/W,U1为前置运算放大器,R1为反馈电阻,U2为二级运算放大器,对前置放大得到的信号进行二次放大滤波后,传送给AD转换单元。
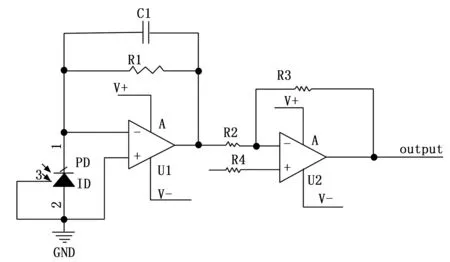
图5 探测器信号放大电路图
2.2 平板电脑及远程监控中心
平板电脑安装车载激光巡检APP,APP不仅可以实时显示甲烷气体的浓度曲线图和云台摄像机拍摄的实时监测图像,将浓度信息与巡检车的行驶轨迹、行驶速度在地图中联合显示。APP还可控制云台转动和摄像机变焦,并在遥测仪报警时发出声音报警的同时,自动触发摄像机拍照、录像。巡检结束后,APP可以对本次巡检轨迹、报警浓度信息进行记录、保存、回放。巡检人员对数据进行筛选后,将检测数据、图像及小视频通过4G模块上传至远程监控中心。
远程监控中心的功能主要包括:实时监控巡检车的位置、速度;查阅历史数据,包括巡线轨迹、泄漏点位置等信息;通过对巡线轨迹进行回放,了解巡线过程;巡线轨迹与管网GIS进行融合;便于燃气巡检人员进行远程监控,并对数据进行统计、分析和挖掘,根据漏点位置、泄漏频率及泄漏类型,生成巡检报告,从而对巡检人员后期工作进行指导。
3 系统软件设计
该系统的DSP信号处理部分的主要功能是产生激光器驱动波形传给激光器控制模块,同时计算甲烷气体的浓度信息并将数据传送给微处理器,其工作流程图如图6所示。
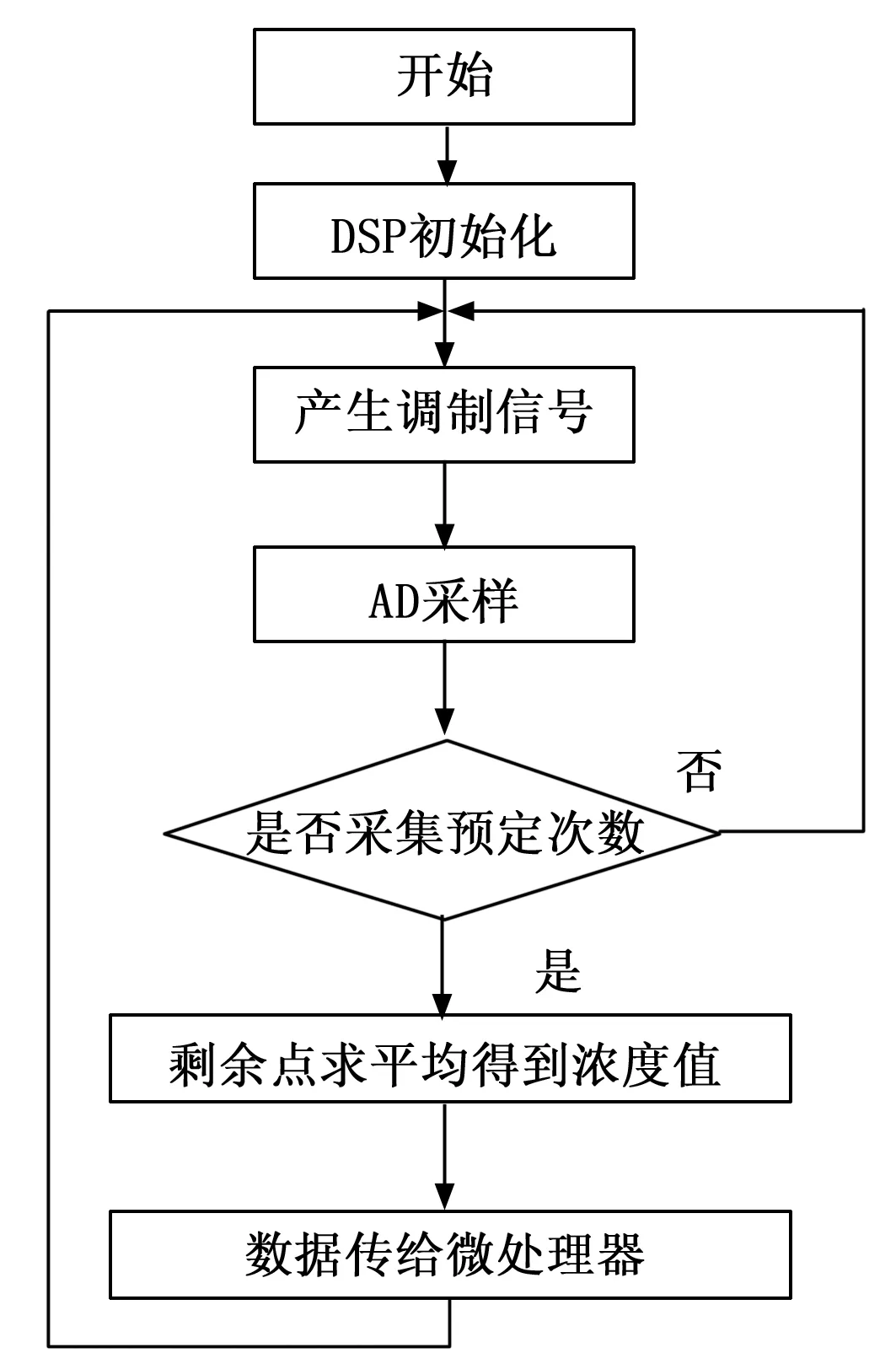
图6 DSP工作流程图
微处理器部分的功能主要是将接收到的甲烷气体的浓度信息按照特定的通讯协议,通过蓝牙发送给平板电脑,平板电脑APP对数据进行解析显示。微处理器的工作流程图如图7所示。
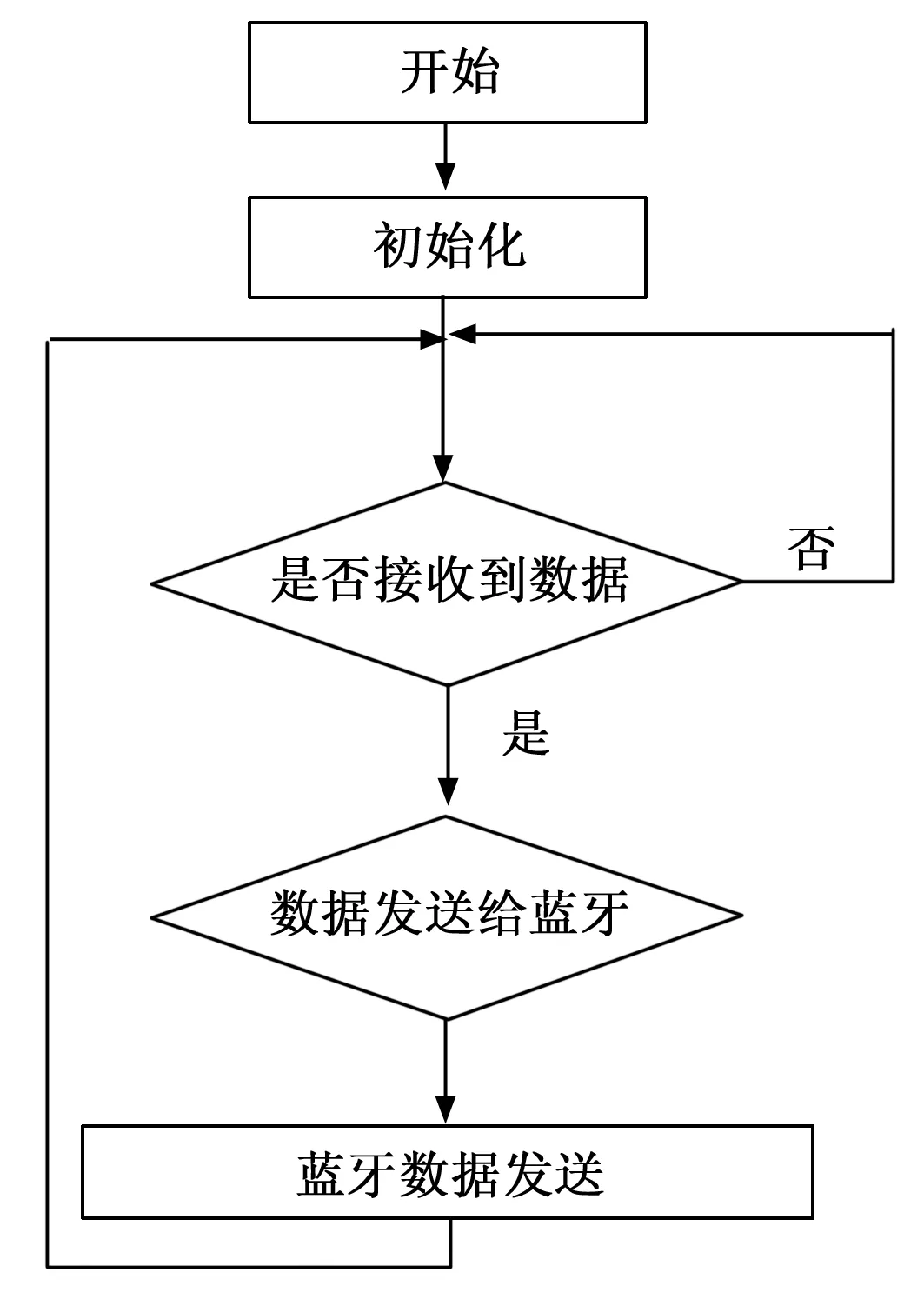
图7 微处理器工作流程图
4 实验结果及分析
为了验证整体系统的性能及实用性,对该系统进行了模拟测试,包括最低检测限测试、室内静态测试、室外静态测试及室外动态测试,同时在某燃气公司进行了实际巡检工作。
4.1 最低检测限测试
为了检测系统的最低检测限,对空气中的痕量甲烷含量进行测试。遥测仪距离反射物20米放置,仿真器中观察到的二次谐波波形如图8所示,从图中可看到明显的甲烷气体吸收产生的二次谐波。经计算,其信噪比约为15,依据美国国家海洋和大气管理局(NOAA)日前公布的最新数据显示,目前实际大气中的甲烷含量大约为1.858 μmol/mol,可以计算出系统的最小检测限约为5 μmol/mol·m。
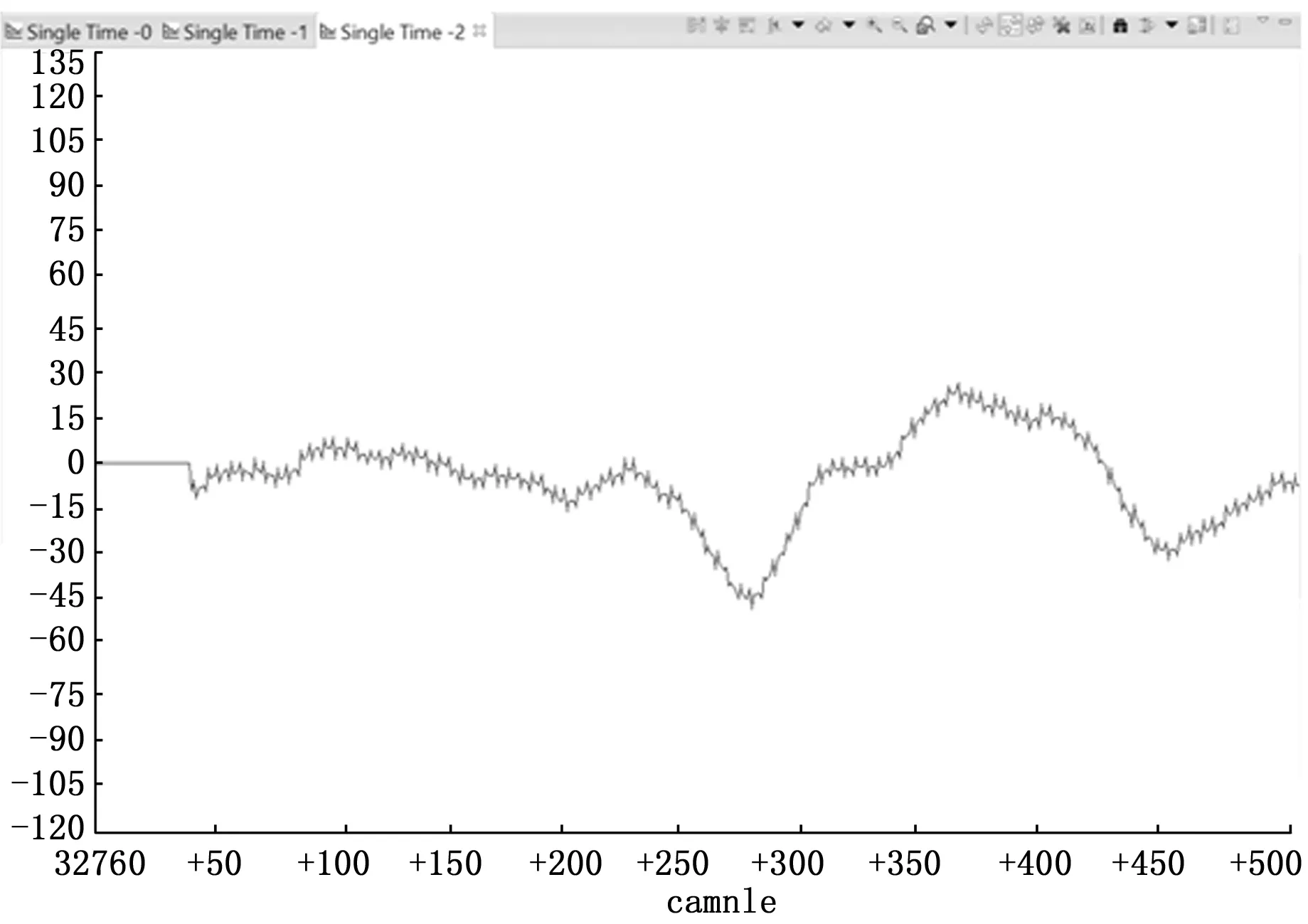
图8 20米距离测量空气中痕量甲烷气体二次谐波图
4.2 静态测试
静态测试主要测试系统的检测距离和灵敏度,分为室内、室外两种环境进行。首先取三个50 cm×70 cm的透明气包,分别编号1#、2#、3#气包,对应充满体积分数为0.1%、0.5%、1%的甲烷标准气体,气包充满后,气包的厚度约20 cm。经理论计算,1#、2#和3#气包的积分浓度值分别为:400 μmol/mol·m、2000 μmol/mol·m、4000 μmol/mol·m。
将气包放置于白板前,车载激光甲烷遥测系统距离白板150米放置,检测激光照射气包进行测试,分别记录每种气包在不同测量距离下的测量结果,记录10次,数据如表1~2所示。
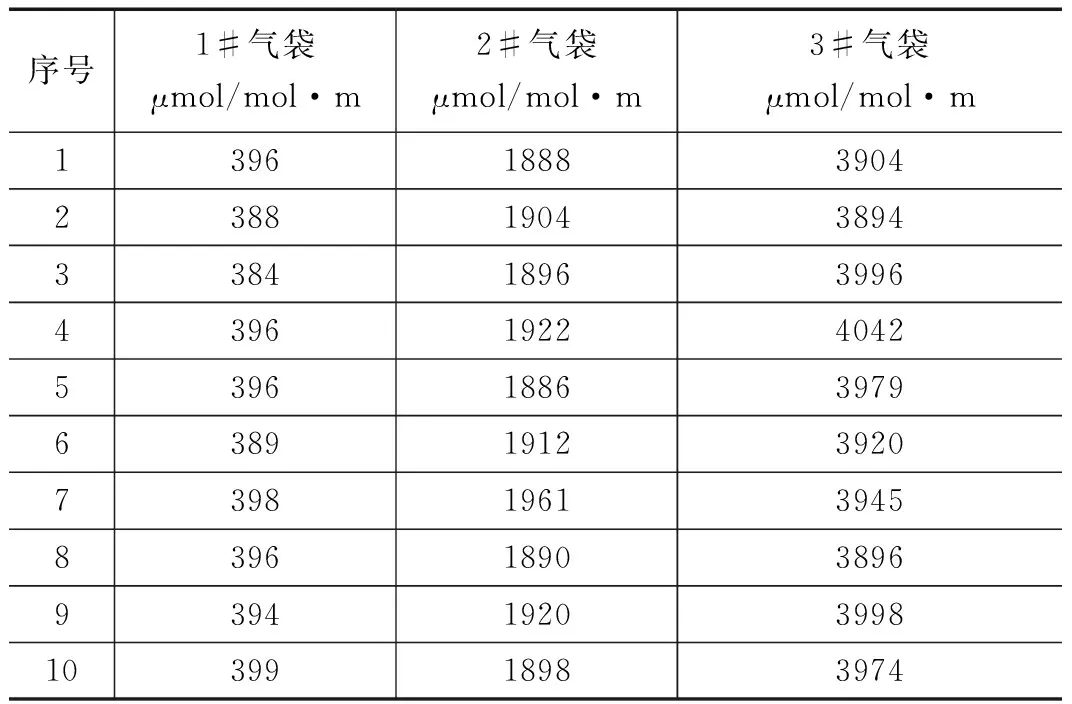
表1 150米室内静态测试数据表
测试结果表明:本系统可检测到距离150米,体积分数为0.1%的甲烷气体泄漏。由于探测器本身噪声及环境光的干扰,测量距离越远,探测器接收到的有用信号越弱,二次谐波与一次谐波的比值没有将收集效率完全消除,导致测量距离越远,数值越偏小。本系统进行了软件算法补偿及气体浓度标定,测量误差最大为6.25%。
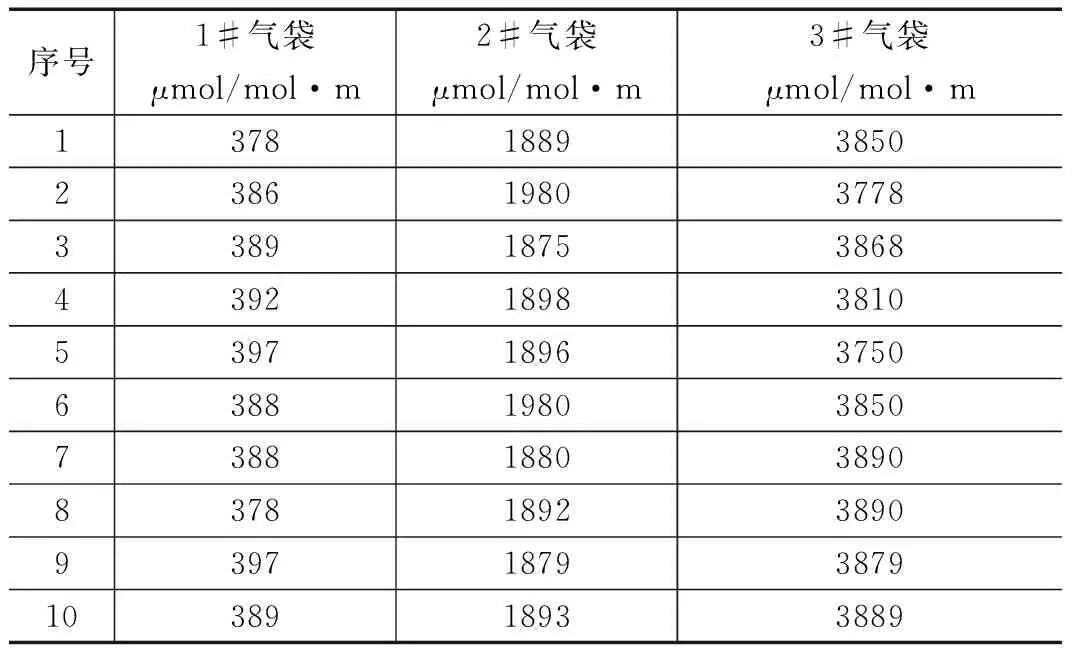
表2 150米室外静态测试数据表
4.3 动态测试
动态测试为模拟检测道路两旁的燃气泄漏点。首先在道路旁的草坪上放置一个充满天然气的连接小型抽气泵和流量计的气袋,作为模拟泄漏点,通过流量计控制气流量为500 ml/min。然后将车载激光甲烷遥测系统安装于巡检车上,巡检车分别以30 km/h、40 km/h、50 km/h车速行驶,检测激光从气袋表面扫过,车载激光甲烷遥测系统与气袋距离约20米,测试该系统是否能够探测到甲烷气体泄漏。每个车速分别进行五次测试,记录测量数据,如表3所示。
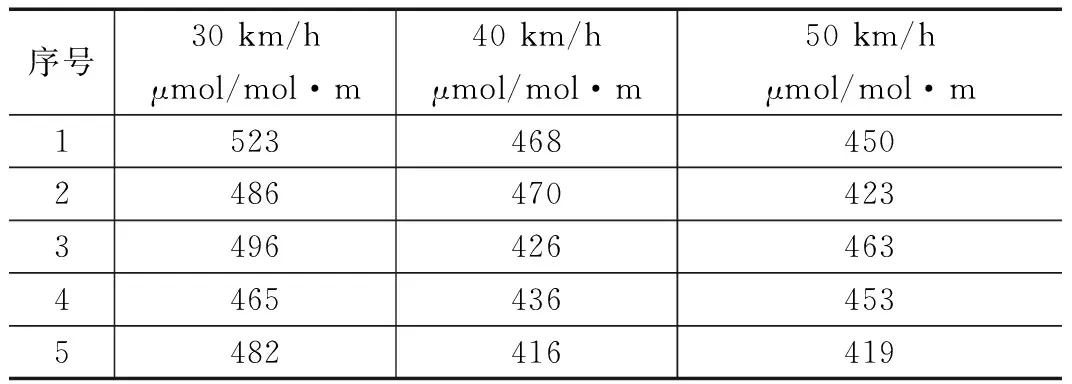
表3 动态测试数据表
测试结果表明,巡检车以三种车速行驶,遥测仪均可探测到甲烷气体泄漏,满足快速道路燃气巡检的要求。该系统有效采样频率为500 Hz,车速为50 km/h时,每两次采样点的间距为0.0276 m,而20米处激光检测光斑约为0.05 m,所以可实现全覆盖。
上述车载激光甲烷遥测系统在某燃气公司也进行了实际的巡检工作,在铺设燃气管道的道路上以30 km/h的速度行驶,遥测仪报警,甲烷气体浓度为355 μmol/mol·m。随后经燃气公司人员对该处进行钻孔取样,并使用乙烷辨识仪ECG100进行分析,此处泄漏气体含有甲烷和乙烷,确认为燃气管线断裂。燃气公司立刻安排施工队进行抢修,避免了严重事故发生。与传统巡检设备相比,该系统可大幅度提高燃气巡检效率,节约人工检测成本,缩短巡检周期。
5 结束语
基于可调谐激光吸收光谱技术和地物的后向散射特性,设计了一套车载激光甲烷遥测系统,可实时对道路两侧燃气管道进行监测。经过模拟测试及燃气公司实际应用表明,该系统检测距离远、响应速度快、灵敏度高、抗干扰能力强、使用方便,特别适合长输管线的巡检,对提高燃气巡检效率、节约人工检测成本、缩短巡检周期、减少安全事故的发生有着重要意义。
