基于轮毂电机故障诊断与重构的控制方法
2020-08-01赵金国张晓娟
赵金国,张晓娟
(1.西京学院 机电技术系,西安710123; 2.西京学院 控制工程学院,西安710123)
0 引 言
由于传统内燃机汽车带来严重的能源消耗以及环境污染问题,各国正积极研究开发新能源汽车来应对和解决油耗与污染问题,希望通过汽车工业的新技术革新来解决所面临的能源与环境危机。同时各国不断提升汽车节能减排有关政策标准,传统动力汽车逐渐向新能源汽车过渡,促使电动汽车的电机驱动技术进入快速发展。轮毂电机是永磁同步电机及其控制系统的简称。轮毂电机技术是将动力装置、传动装置及制动装置都整合一起到轮毂内,可采用分布式驱动方式。由于自身的结构特点,轮毂电机具有诸多优点:取消了传统汽车的动力系统各部件,使车辆整体结构简单,底盘空间利用率增大;可以容易的实现单个车轮独立驱动,使车辆驱动模式的设计更加灵活,可以达到驱动力的最优分配;可以通过对单个或多个轮毂电机进行控制,车辆动力学控制的能力得到提高,车轮响应更加迅速,减少了动力在传递过程中产生的损耗,提高了汽车的整体效率[1]。因此,轮毂电机驱动系统成为电动汽车驱动系统的较好选择。
轮毂电机的稳定可靠运行依赖于电机控制技术,因此对电机各种运行状况下控制策略的研究必不可少。在实际的工业控制系统尤其是高性能的调速场合,电流传感器是重要的采集电流信号的元件,在高低温、潮湿等环境下可能发生故障导致精度的降低甚至损坏[2],这将直接影响到电机的调速性能,影响电机运行稳定性和可控性,甚至造成危害影响车辆驾驶员的生命安全[3]。因此,轮毂电机电流传感器的故障控制研究是十分重要的。
1 技术分析
1.1 相关技术不足的分析
国内有关“电流传感器故障重构方法”技术资料显示,其主要针对永磁同步电机电流传感器故障重构方法及装置[4]。其控制方法通过构造状态方程得到正常的电流观测值,这需要精确的电机驱动系统模型和明确的系统参数,众所周知,电机在实际运行过程中由于温度的变化会引起电机参数的变化,因此,该控制方法不具备良好的鲁棒性,同时该控制方法需要对整个电机驱动系统建立模型,对于系统计算能力要求比较高[5]。
三种主要故障类型包括:故障1为传感器测量的突然失灵造成测量信号丢失;故障2为传感器测量值与真实值存在恒定误差;故障3为传感器测量值与真实值的偏差随时间发生变化。
1.2 技术方案步骤
轮毂电机故障诊断与重构的控制方法,包括以下步骤:
①根据电流传感器的三种主要故障类型建立轮毂电机转速闭环控制下传感器故障时输出电流ix的表达式。②通过电流传感器测量三相电流ia,ib,ic。③利用相电流辐射对电流进行标幺化处理,得到标幺化的相电流ixN。④通过构造故障检测变量W、U的表达式对电流传感器进行故障检测。⑤构造传感器故障处理的优先级,并且通过构造故障诊断变量Rx、Sx的表达式确定传感器故障的位置。⑥按照故障处理优先级以及传感器故障诊断信息,通过计算重新构造电流输出值[6]。⑦完成传感器电流故障诊断以及故障电流重构后,将重构的电流与正常的传感器输出电流共同输出作为电流闭环控制的反馈电流,实现电机的正常运行[7]。
当x相电流传感器发生故障时,传感器相电流输出值会发生变化,包括电流幅值和相角的变化,此时x相电流传感器输出电流表达式为
ix=(1+A)Imsin(ωt+Фx)+B
(1)
式中,A为漂移偏差系数,B为固定偏差,Im为电流幅值,ω为电气角频率,Фx为x相电流传感器输出电流的初始相位角。
若无故障发生,则A=0,B=0;当故障1发生时,则A=﹣1,B=0;当故障2发生时,则A=0,B≠0;当故障3发生时,则A≠0,B=0。
检测电流传感器三相电流ia,ib,ic。
利用相电流幅值对电流进行标幺化处理,标幺化后的电流ixN表达式为
(2)
式中,Im-est为三相电流幅值的最大值,即Im-est=max{Ia-est,Ib-est,Ic-est};ixN的取值范围为±1.4。构造故障诊断变量W、U的表达式对电流传感器进行故障检测,判断传感器是否发生故障。构造的检测变量表达式为
(3)
(4)
d=ia+ib+ic
(5)
式中,T为输出电流波形周期,ia、ib、ic分别为a、b、c三相电流,iaN、ibN、icN分别为a、b、c三相标幺化电流,W为三相电流之和的绝对值取均值,U为三相标幺化电流之和的绝对值取均值。
若没有传感器故障时,检测变量W、U值均为0,考虑到负载转矩及转速的变化,设置变量W、U门限值CW、CU,当满足W>CW或U>CU,即可判断电流传感器发生故障。
考虑到3种电流传感器故障不能同时发生,构造传感器故障处理的优先级为故障1、故障2、故障3。通过构造故障诊断变量计算确定故障类型以及确定故障发生的传感器位置[8]。电流传感器模块、电流标幺化处理模块、电流传感器故障判断模块以及故障优先级诊断重构处理模块组成的基本流程,构造传感器故障优先处理流程图,如图1所示。

图1 构造传感器故障优先处理流程图
首先判断传感器是否存在故障,若判断存在故障,则按照故障1→故障2→故障3,依次类推电流重构模型进行电流的重构计算[9]。
构造的故障类型判断以及故障位置确定的变量Rx、Sx的表达式为
(6)
(7)
式中,Rx为x相电流绝对值的均值,Sx为x相电流的均值。
若传感器没有故障发生,可得Rx=0.64,Sx=0,当检测存在故障时,按照优先级首先判断是否发生故障1。令
Fx=0.64-Rx
(8)
式中,Fx为x相电流传感器发生故障1的标志。
当x相传感器没有发生故障1时,定位变量Rx=0.64,Sx=0;当x相传感器发生故障1时,定位变量Rx=0,Sx=0.64,考虑到负载转矩及转速的变化,设置变量Fx门限值CF,当判断发生故障且满足Fx>CF,即可确定x相传感器发生故障1。
若判断发生故障且排除故障1,则按照优先级判断是否发生故障2。
当x相传感器没有发生故障2时,Sx=0;当x传感器发生故障2时,Sx≠0,考虑到负载转矩及转速的变化,设置变量Sx门限值CS,当满足|Sx>CS可确定x相传感器发生故障2。
当检测到电流传感器故障存在,且排除故障1、2时,可确定传感器故障为故障3;通过三相电流之和d以及转子位置信息θ确定故障位置的诊断。
若d(kπ)=0,则a相传感器故障,若d(kπ+2π/3)=0,则b相传感器故障,若d(kπ-2π/3)=0。则c相传感器故障。
传感器故障诊断逻辑归纳,如表1所示。

表1 传感器故障诊断逻辑
2 技术实施
按照故障优先处理级以及传感器故障诊断信息,通过计算机重新构造电流输出值。为了计算重构电流的表达式,假设故障均发生在a相[10]。

图2 故障1的诊断与电流重构图
当确定传感器发生故障1时,电流传感器完全失效故障,实现传感器位置确定并进行故障电流重构的控制流程,故障1的诊断与电流重构,如图2所示。电机的输入电流通过传感器测得,按照故障1→故障2→故障3的故障诊断步骤确定故障的位置,利用另外正常的两相电流传感器电流值相加得到重构的相电流值,作为电流闭环控制中的反馈电流,即:
ia′=-(ib+ic)
(9)
当确定传感器发生故障2时,电流传感器固定偏差故障,实现传感器位置确定和固定偏差计算并进行电流固定偏差修正的控制流程,要按一定规律和顺序进行,故障2的诊断与电流重构,如图3所示。

图3 故障2的诊断与电流重构图
按照故障1→故障2→故障3的故障诊断步骤确定故障传感器位置,按照设置的步长迭代计算电流固定偏差,利用故障传感器的电流输出值与固定偏差作差得到校正的电流值,并计算诊断变量|Sx|,判断其是否小于门限值,若变量小于门限值,则完成电流重构,重构的电流输出作为电流闭环控制中的反馈电流,若变量大于门限值,继续迭代计算固定偏差,直至校正的电流能够使诊断变量小于门限值,此时电流固定偏差得到消除,即:
(10)

当确定a相传感器发生故障3时,电流传感器漂移偏差故障,实现传感器位置确定和漂移偏差系数的计算并进行电流漂移偏差修正的控制流程(电流重构计算),故障3的诊断与电流重构,如图4所示。按照故障1→故障2→故障3的故障步骤诊断确定传感器的位置,然后计算存在偏差电流的漂移偏差系数A,利用故障传感器的电流输出值除以漂移偏差系数得到重构的电流值,此时满足:
(11)
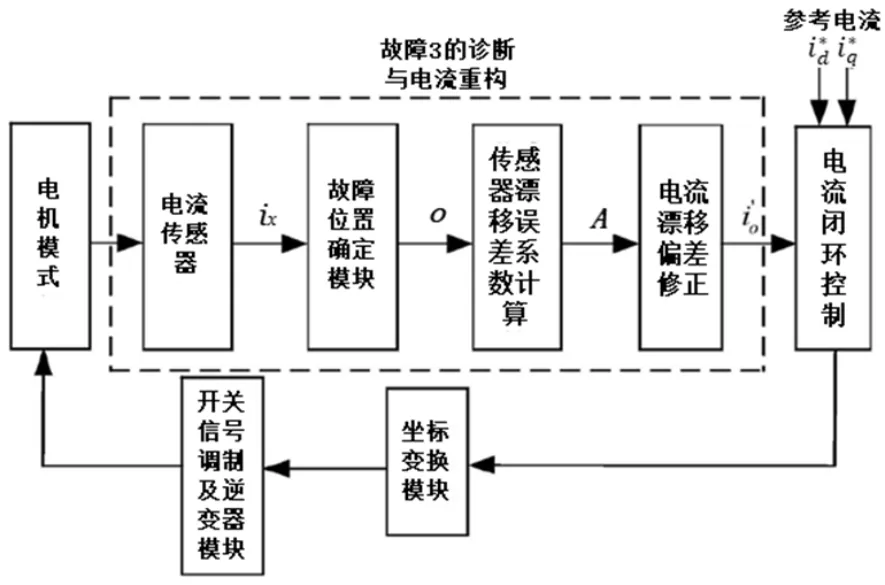
图4 故障3的诊断与电流重构图
漂移误差系数A的符号由三相电流之和d以及转子位置信息θ确定,若d(2kπ+π/2)值为正,则漂移误差系数A的符号为正号,反之则为负号,漂移误差系数A值为
(12)
通过传感器电流与电流增益的比值计算重构的输出电流为
(13)
通过上述方法完成传感器电流故障诊断以及故障电流重构后,将重构的电流作为电流闭环控制的反馈电流,实现电机的正常运转。
3 结 语
本文研究的轮毂电机故障诊断与重构的控制方法,用于处理传感器完全失效故障,同时具备对传感器固定偏差和漂移误差的在线修正能力,重点解决了以下的问题。
(1)利用传感器电流信息和电机转子位置信息,建立电流传感器故障诊断以及电流信息重构的控制器模型,因而不需要精确的轮毂电机驱动系统模型和明确的系统参数。该控制方法的简单性和可靠性使该方法特别适用于计算能力有限的实时控制系统中。
(2)该控制器模型依靠电流信息和电机转子位置信息进行实时检测和控制,其优点是对于电机驱动系统参数的变化以下并不大,因此有效提高了该控制器的鲁棒性和实时性。
(3)该控制器模型能够针对电流传感器三种故障,在实现故障诊断的同时,能够通过快速计算完成电流信息的重构,以满足轮毂电机稳定正常运行,很大程度上提高了电机运行时传感器的容错性能。
