刮板输送机链轮链环啮合特性数值模拟分析
2020-07-31冯文军
冯文军

摘 要:为了解决刮板输送机链轮及链条磨损严重造成的损坏,本文对链轮与链条的啮合特性及受力情况进行分析,并利用数值模拟软件对额定功率下圆环链、链环及链轮间的动力学特性进行模拟分析,给出了链轮及圆环链的应力及位移变化情况,为后续链轮及圆环链的优化作出一定的参考,为刮板输送机的正常运行提供一定保障。
关键词:数值模拟;刮板输送机;圆环链;力学特性
1 前言
随着矿山机械水平的不断提升,刮板输送机作为矿山主要的运输设备,其工作性能直接关系着矿井的正常生产。刮板输送机的链条与链轮间的啮合特性是刮板输送机传动的核心问题。为了解决刮板输送机链条及链轮受力不均造成的磨损,众多学者对此进行过研究。本文利用数值模拟软件对额定功率下链轮链条间的啮合进行分析,给出了管输送机链轮及链条的应力应变云图,为刮板输送机的安全运行作出一定的参考。
2 圆环链与链轮啮合分析
刮板输送机在传动过程中链轮及链齿的啮合是一个多体动力学问题,考虑到刮板输送机链轮链齿的形状不规则性,所以链轮链齿间的受力问题较为复杂,所以为了分析链轮链齿啮合间的受力情况,需要对其进行分步分析,首先需要对链轮与园链环及链环与圆链轮间的受力进行分析,后对啮合的各个过程进行分析。驱动链轮与圆环链间的啮合过程示意图如图1所示。
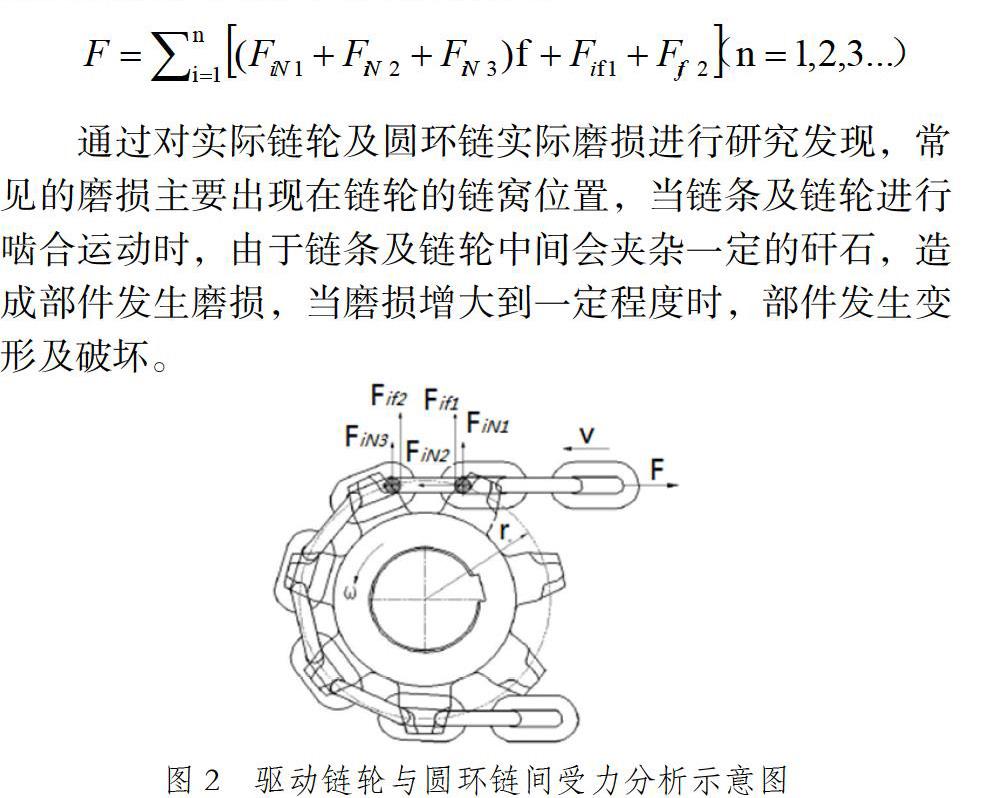
如驱动链轮与圆环链间的啮合过程示意图所示,其中点O为圆环链轮的中心,链条绕着O点进行转动,且转动的角速度为ω,将传动过程进行分步,当传动过程I时,此时平环1刚好处于链轮链窝的区域,此时平环与链窝进行啮合,当圆环链条发生转动时,此时的立环2及平环3等链环发生相对于O1点的转动,转动的方向为顺时针方向,当传动过程达到II时,此时立环4及平环3绕着O2发生相对的转动,转动的方向为顺时针方向,当传动过程达到III的位置时,此时的平环3与圆环链链窝的区域啮合,完成了链轮及链环的啮合过程,在刮板输送机传动的过程中,一直持续重复着上述运动。为了对驱动链轮与圆环链接触的受力进行分析,以及为后续的数值模拟提供依据,对圆环链及圆环链轮间的受力进行分析,在进行啮合过程中发现,链窝的长度需要大于圆环链的长度,这样才能顺利的啮合。在链轮轮窝与链环啮合过程中,由于相对的滑动极易造成链轮的失效,对链轮及链环间的接触进行分析,如图2所示。
如图2所示,其中FiN1和FiN3为有载侧链窝底面对平环的应力;FiN2为有载侧链窝侧面对平环的应力;Fif1和Fif2为有载侧平环和第一及第二个立环间的摩擦力;F为有载侧的拉应力;r为链轮节的半径。将平环和链窝间的摩擦系数设定为f,所以可以得到公式:
通过对实际链轮及圆环链实际磨损进行研究发现,常见的磨损主要出现在链轮的链窝位置,当链条及链轮进行啮合运动时,由于链条及链轮中间会夹杂一定的矸石,造成部件发生磨损,当磨损增大到一定程度时,部件发生变形及破坏。
3 数值模拟计算分析
本文对圆环链和链轮间的接触进行数值模拟,首先选择abaqus数值模拟软件,利用Catia软件进行模型的建立,后导入abaqus中。对模型进行力学参数的设定,链轮的弹性模量206GPa、屈服极限230 MPa、密度7000 kg/m3;圆环链的弹性模量210GPa、屈服极限1170 MPa、密度7800 kg/m3。
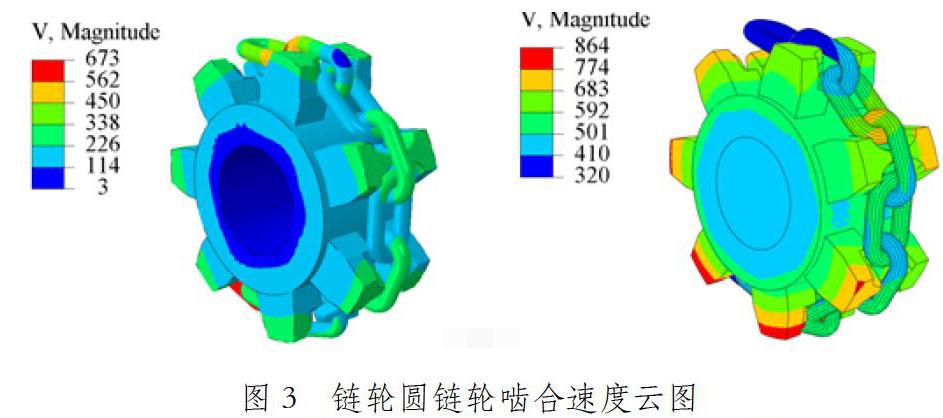
其中圆环链的材料选择为23MnCrNiMo,链轮的材料选择为30CrMnTi。完成模型参数设定后对模型进行网格划分,在进行网格划分时需要考虑计算精度及计算机的运行性能,网格划分过细会大大加大计算机的运行时间,网格划分过于粗疏会降低计算结果的精确实性,所以在进行网格划分时需要在精度的基础上降低网格的密度。对模型进行边界设置,链条的拉应力设定为7.3kN,运行速度为0.78m/s,分析步设定为200,完成设定后对模型进行计算。试验观察可知,链轮的应力集中位置主要集中在链轮的链窝位置,即链轮与链环的接触位置,同时由于链环在运动过程中受到波动载荷及链轮的多边效应,所以使得链环受到的应力主要在链环的弯臂和直臂过渡的位置,在链轮的链窝位置出现应力集中,且应力集中最大值为524MPa,链窝位置的应力最大值是由于在链轮启动瞬间带动平环发生运动,瞬间产生较大的冲击载荷,当启动完成后,链轮在额定功率下逐步趋于平稳,此时链轮的链窝在接近立环的位置出现应力216MPa,链轮平稳运行。观察应力集中位置,发现应力集中部位的面积较小,所以极易发生破损,当链轮持出现启动停止的操作时,链轮发生磨损变形,且失效。对圆环链链轮啮合的速度云图进行分析如图3所示。
从图3可以看出,速度在链轮的轮齿部位出现应力集中,最大速度为啮入链环的位置,最大的速度为0.86m/s,链轮圆链轮啮合速度的最小值出现在啮出端的链环部位,速度最小值为0.03m/s。链轮的速度与其位移分布规律几乎类似,这是由于在链轮启动瞬间时,链环的位移与其应变规律呈现正比例规律,在链轮带动链环时,在链环啮入位置出现最大的速度。对圆环链啮合的应力进行分析,其主受力环为圆环链的左平环位置,在圆环链受到驱动时,链环弯臂位置出现圆环链的最大应力,且接触面积较小,此时的左平环最大受力为782MPa,驱动瞬间产生主动运动的平环受到的集中应力更加明显,但应力的最大值主要出现在被动运动的链环位置,且由于为被动运动,所以链环会受到一定的振动,从而导致在主动驱动与被动运动的接触位置出现应力集中,反复如上的作用,使得刮板输送机的圆环链发生磨损变形,从而发生接触位置的断裂,影響刮板输送机的正常工作。
4 结论
①本文通过理论分析对刮板输送机的圆环链间及链环与链轮间的啮合过程进行分析,且对其接触的受力情况进行分析,为后续的数值模拟研究建立基础;②利用abaqus数值模拟软件对链轮应力及速度云图进行分析发现,应力的最大值为524MPa,链轮平稳运行时,链轮的链窝在接近立环的位置出现应力216MPa,链轮平稳运行。在啮入端的链环位置出现速度的最大值为0.86m/s;③利用数值模拟软件对圆环链应力云图进行分析发现,在圆环链的左平环位置出现最大应力为782MPa,链环的接触位置由于驱动冲击,极易发生磨损变形。
