掘进机截割控制系统的设计
2020-07-31齐静
齐 静
(新景公司生产技术部, 山西 阳泉 045000)
引言
掘进机截割系统作为掘进设备运行高质开展的关键组件,其运行质量对整个矿井生产采掘交替的有效衔接意义重大。而常规的掘进机截割组件多为悬臂式截割结构,在作业时这种机构的截割路径和动作全部需依靠人工进行操作,从而达成掘进作业的有效开展[1]。这种作业方式往往对作业人员的个人技能有着较高要求,一旦作业人员技术不过关或长时间高强度工作,非常容易造成截割面质量不佳的情况,从而对掘进作业的质量进行造成负面影响。鉴于此,为更好地满足矿井生产的现代化需求,需开发一种新型的掘进机截割智能控制系统,从而实现截割机构作业的自动化。
1 掘进机截割结构作业原理的分析
掘进机截割结构是完成掘进巷道岩壁切割的执行机构,其作业时的路径直径决定着截割面的形状和是否需进行重复截割。整个掘进机的截割机构构成组件包括液压驱动装置、截割臂、截割头和驱动电机。整个机构借助执行油缸布置于掘进机机身上,作业时两个相互独立的液压控制系统[2]操控截割机构开展上下左右摆动作业;此外,还能够同时使用两套油缸操控掘进机截割机构开展复合运动,进而确保截割机构可以充分适应不同类型巷道的截割作业,见图1。
2 掘进机截割自动化控制的分析

图1 矿井掘进机结构示意图
掘进机截割机构的自动化控制是以掘进机的人工操作相关参数为参照基础,结合施工现场的掘进调研和操作人员的激光指向装置实现对掘进作业未知的确定,进而借由对操作台手柄的调控实现对电流比例阀的开口度,实现对掘进机构摆角的控制,以确保液压缸流道达到合适位置,实现对活塞杆的推动,确保截割部能够在水平或垂直方向进行方向调换或速度调控。同时为充分避免井下复杂作业环境对司机操控精准度的影响,最大程度提升掘进截割效果,将PLC 控制技术应用到掘进机截割控制中[3-4]。PLC 装置能够通过对感应装置收集数据的汇总分析,对掘进机截割部运行状态进行全面分析,进而发出相应的操控指令,并在激光定位系统的配合下达成对整个掘进机构运行的准确操控,见图2。
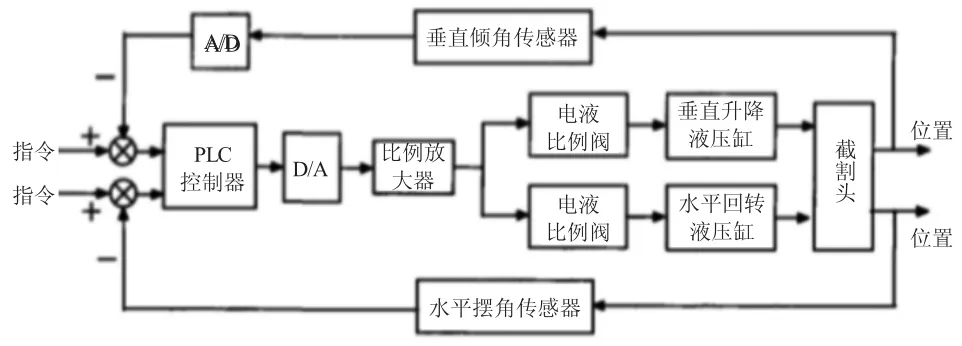
图2 基于自动化控制技术的掘进机截割作业流程示意图
同时,为确保巷道掘进截割作业的精准、有效,在掘进机截割机构的运行中采用慢启动、慢停加速的控制方式和对截割臂摆动速度的分阶段控制调节方式,下页图3 所示即为掘进机截割系统自动控制启停和调速作业示意图。作业时,慢启动和慢停止的目的主要是力保掘进巷道截面成型精准有效,同时尽可能延长电机使用寿命,避免截割机构端部在快速急停或急启中因剧烈震动而出现损坏[5];分阶段调节速度的目的主要在于保证液压系统可以快速、及时进行供液,并在截割中达成无极调速和电机功率的恒定输出。
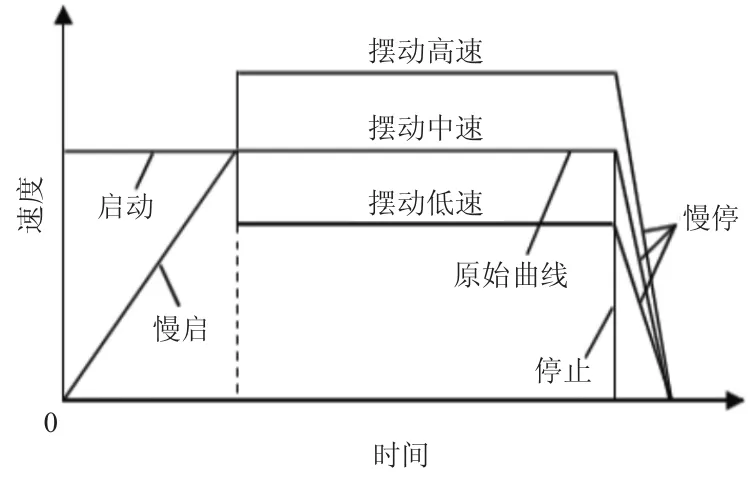
图3 掘进机截割系统自动控制启停和调速作业示意图
3 掘进机截割机构自动控制组件选择的分析
1)传感装置。为实现掘进机截割机构竖直方向移动的精准定位,实现其截割轨迹按照预设计有效运行,配套使用重力摆式感应装置,对截割机构倾角进行精准监测。该监测装置属于磁敏电阻型监测装置,可以实现监测目标倾角的无接触精密监测,确保巷道掘进作业期间截割机构在垂直方向的摆动角和掘进机机身保持规定角度。而为实现对截割机构水平方向摆动角的监测,采取SMR 型磁敏感感应装置,该类装置具备良好的编码功能,其在使用中需要配合感应齿联合使用。此外,针对截割头伸长量的监测则通过行程感应装置,该装置布设于系统油缸内。对系统作业电流的监测选用型号CHY-220AS/V 的专用监测装置,其可以将所收集的电机电流信息通过变送装置的处理转化为PLC 装置可以直接识别的标准数据信息。该电流监测装置可监测电流区间为0~220 A,输送线性度为1.3%,转化而成的电流信号介于0~25 mA。
2)A/D 转换装置。为实现对数据信息的有效转化,PLC 控制器拓展口配设有型号FX2N 的A/D 转换装置,该装置具备四个传输通道,可以快速将模拟信号转化为数字信号。信号分辨率最高可达16 位,其中电压与电流的输入/输出信号均通过接线端和转换器完成变换,转化后的电压范围介于-10~10 V[6],转化后的电流信号范围为-20~20 mA。PLC 控制器根据所接收信号通过综合分析后向执行元件发出执行指令,操控系统运行。
4 自动控制功能的实现
基于人工操作相关参数,借助数值模拟等仿真手段,借由在PLC 控制器上配设可编程语言,实现对截割结构不同运行动作的预设,从而实现对掘进结构割壁动作、方向等的自动调整。同时,为确保所形成巷道断面质量符合生产需求,自动控制系统需操控截割机构机械能扫地工作。整个掘进作业期间,截割机构运行速度可分设为三个级别,自动控制系统根据转换所得电流、电压信号,进而确定相应的截割作业速度,见图4。
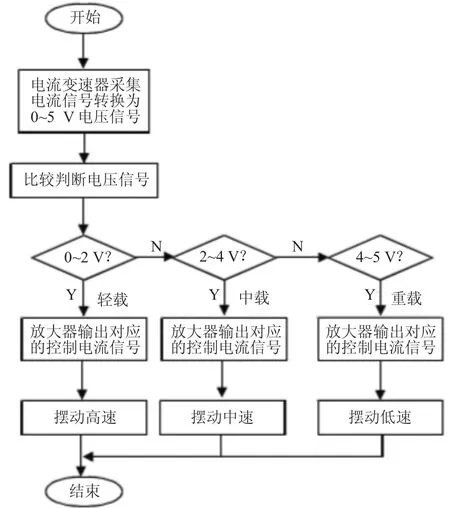
图4 掘进机截割机构自动控制流程示意图
5 结论
通过将所设计的自动化控制系统应用在井下煤岩巷道生产实践中,并借由对其的运行成果的监测可知,通过PLC 自动控制系统操控掘进截割作业,巷道横截面成型后两帮误差均值同设计值相差不超过300 mm,小于人工操作误差值。同时,机身始终处于巷道中线,无偏差,单边定位和回转定位精准度均不超过30 mm,并能够完成断面扫底工作。整个过程中掘进机未发生任何机械故障,并提升了掘进速度,降低了作业人员劳动强度,提高了巷道掘进成型效率和质量。
