数字孪生驱动的冬奥场馆消防安全动态疏散方法
2020-07-29刘占省张安山王文思王京京
刘占省,张安山,王文思,王京京
(1. 北京工业大学城市建设学部,北京100124;2. 北京工业大学城市与工程安全减灾教育部重点实验室,北京100124;3. 北京工业大学信息学部,北京100124)
随着冬奥会场馆建设的正常推进和2022 年冬奥会的日益临近,关于冬奥场馆的安全问题越来越受到重视。冬奥会场馆建筑结构复杂,人员密集,一旦有火灾等突发事件发生,救援和疏散的难度巨大,不仅会造成大量的人员伤亡,而且会造成严重的社会影响。因此在结构复杂的冬奥场馆中,如何实现快速高效的人员疏散以降低事故损失是需要解决的重要问题。
于海明等[1]通过对“鸟巢”进行人流疏散的仿真分析,总结人流疏散规律,并通过引入疏散系数,使各出口的疏散人流得到均衡,从而达到缩短疏散时间的目的;马伟伟等[2]通过对3 种不同工况下的疏散模拟,说明在公共场所紧急疏散时,按照最短路径原则设置引导员,可以减少疏散时间;同时,近些年基于Dijkstra算法、蚁群算法理论对疏散路径进行优化的研究也有很多[3-5];Choi 等[6]通过开发计算模型,使用危险预测数据来确定在发生建筑火灾时最优的疏散路线、最安全的和最近出口的最短路径。虽然这些方法都取得了较好的实验或模拟结果,但是却都以二维形式的疏散引导表达方式为主,当建筑平面布局复杂、不同楼层平面布局变化较大时,单层的二维平面疏散引导很难起到很好的疏散效果。
针对上述问题,很多学者把BIM(building information modeling)技术引入到疏散管理当中,以实现三维的疏散指示。Wang 等[7]设计了一个基于BIM 的建筑火灾安全管理模型,其中的疏散路线规划模块借助BIM 技术实现了疏散路线的3D 视频展示;王宇佳等[8]利用BIM 和WebGL 技术,把疏散路线在Web端进行了三维展示。但是以上这些疏散路径的规划都未能结合危险源的位置和火灾的发展态势进行,当危险位置与预先规划的疏散路线发生冲突时,路线就会误导受困人员,造成疏散时间的浪费。
高雪等[9]在进行疏散路线规划时考虑了起火点和过火点的位置,并把疏散路径在BIM 模型中进行了三维展示;宋洋等[10]利用Pyrosim 软件对火灾的发展过程进行了模拟,并推测了火灾发展对人员疏散的影响;王厚华等[11]通过模拟预测火灾烟流的运动和利用自主开发的软件模拟,分别得到可用的和必需的安全疏散时间,借此对火灾疏散进行评价;金泽人等[12]基于元胞自动机模型,考虑火灾蔓延和火灾对行人行为的影响,对人群疏散进行了模拟。但是这些对危险发展态势的判断都来自于假设和数值模拟,并不是火灾发生时的实际情况,当预测和模拟情况与实际情况不一致时,得出的疏散建议就丧失了参考价值。
针对这一点,Chen等[13]把物联网技术应用到疏散管理中,通过传感器实时监控室内环境的变化来监测室内火灾的发展态势;Li 等[14]提出了一个基于射频的室内定位框架,用于建筑应急疏散,并被证明有较强的鲁棒性;类似地,Riaz等[15]融合了BIM技术和无线传感器技术来解决工人在有限空间的安全问题。但是,这些研究都未能综合考虑人员位置和火灾发展态势。
综合以上研究发现,目前的疏散方法主要存在以下不足:①疏散指示的表达方式以二维为主;②疏散路径规划不能根据火灾的发展态势实时动态地进行;③即使考虑了火灾发展态势但也是模拟结果,与实际发展态势可能不同;④路径规划不能把人员的位置和火灾的发展态势进行综合考虑;⑤对于疏散问题的研究很少应用到实际的建筑物当中。
另一方面,随着新一代信息技术的发展和工业信息系统的推动,运用数字孪生理论解决复杂工业系统和智能制造方面的问题已成为研究热点。
数字孪生(digital twin)是指把现实世界中的物理模型映射到数字世界中,在虚拟的数字世界中形成与现实世界物理模型相对应的数字模型;而且数字模型和物理模型可以进行双向的信息交流融合与迭代优化,从而实现对现实世界中物理系统的性能改善[16]。数字孪生最早由美国国家航空航天局(NASA)和美国空军应用于航天器的健康维护和剩余寿命预测[17]。数字孪生开辟了一种使物理活动与虚拟世界同步的新方法。信息技术的发展使其得到了空前的发展,被广泛地应用于各个行业,包括产品设计、生产线设计与健康管理等。在建筑行业,阿里云出版了《城市大脑探索“数字孪生城市”白皮书》,提出通过建立数字孪生城市,以云计算与大数据平台为基础,借助物联网、人工智能等技术手段,实现城市运行的生命体征感知、宏观决策指挥、事件预测预警等,赋予城市“大脑”[18]。我国政府认为“数字孪生城市”是“智慧城市”实现的必要途径和手段,并致力于将雄安新区打造成全球领先的数字城市[19]。Shim等[20]把数字孪生理论应用到预应力混凝土桥梁的养护系统开发中,提出了桥梁维修工作的详细框架以改善桥梁评估。Kaewunruen等[21]把数字孪生理论与BIM应用到铁路道岔系统生命周期管理中,可以提高规划效率,使工作有序、高效、可持续地进行,避免浪费。但是针对单一房屋建筑应用数字孪生理论的研究鲜有报道。在安防行业,应用数字孪生理论的研究也很少。为了推动数字孪生在相关行业的发展,陶飞等[22]提出数字孪生五维模型的概念,探讨了该模型在船舶、发电厂、车辆等十个领域的应用思路与方案,并认为该模型在建筑、安全等领域都有应用潜力。
针对以前对消防疏散问题研究的不足和数字孪生理论的研究现状,本文提出了一种基于数字孪生的动态疏散引导方法。利用物联网和BIM技术建立了可以实时反映人员位置和室内环境的针对疏散的建筑物数字孪生模型;根据模型中的数据,利用Dijkstra算法规划出合理的疏散路径,从而实现对人员疏散的实时动态指导。本研究以2022 年北京冬奥会雪车雪橇场馆中的某建筑为例,初步证明了该方法的可行性。
1 方法概述
1.1 基于数字孪生五维模型的安防框架
结合建筑室内安防的数据特点和应用需求,本文提出了数字孪生驱动的建筑室内安防应用思路与方案,如图1所示。图1中,可视化数据管理,可以实时查看布置在室内的传感器采集的各种信息,以及周围的建筑布局;当某处环境数据超过限值,可视化建筑消防预警系统可以提出警示;当危险发生时,可视化疏散引导系统可以对受困人员进行三维可视化引导,帮助其快速逃离危险。本文着重研究在该框架下的消防疏散问题。
1.2 数字孪生驱动的消防疏散引导方法框架
结合消防疏散问题的特点和陶飞等[22]提出的数字孪生五维模型,本文提出了面向动态消防疏散的多维模型,如式(1)所示。
式中:MEDT为面向动态消防疏散的多维模型;BPE为建筑物物理实体;EPE为室内环境物理实体;PPE为人员物理实体;BVE为建筑物虚拟实体;EVE为室内环境虚拟实体;PVE为人员虚拟实体;SS为对人员的疏散服务;DD为与疏散相关的数据;OA为对疏散路径进行优化的算法;CN为各组成部分间的连接。
式(1)中,BVE、EVE、PVE等虚拟实体不必要对BPE、EPE、PPE的所有信息都进行刻画,只需要刻画与疏散问题相关的数据内容即可。SS代表的服务即是对室内人员进行疏散引导的功能服务。DD即是与疏散相关的室内布局、环境、人员位置等信息。OA即是对DD进行处理,得到疏散路径的优化算法。CN的作用是实现现实物理世界与虚拟数字世界的互联互通。在该问题中主要通过人工建模和物联网采集数据实现物理环境向数字世界的映射。综合这些虚拟数字信息,再通过移动智能设备、现实报警设备等把该疏散路径和危险情况传递给建筑物内人员,从而影响建筑内人员的位置。这就是基于数字孪生的动态消防疏散引导方法,如图2所示。
2 面向消防疏散的数字孪生模型建立
2.1 数字孪生模型所需刻画的信息
在以上的引导方法雏形中,需要在虚拟数字世界建立一个与现实物理世界相对应的数字孪生模型,上文已经提到数字孪生模型只需要刻画与消防疏散问题相关的信息即可。建筑信息包含很多内容,为了能够实现三维可视的疏散引导,需要刻画建筑的三维模型,但只需要保留建筑物内结构的几何特性即可,而建筑物内配筋、材料种类、物品生产厂家等都是与疏散无关的信息,并不需要刻画。另外,为了方便得到疏散路径,还需要抽象建筑物内各房间的交通关系(即DD1),以便数据分析处理。在火灾中导致人员伤亡的主要原因有CO中毒、缺氧、吸入烟气过多以及吸入热气或温度过高。所以本研究中的数字孪生模型主要刻画室内空气中的CO 浓度、氧气浓度、烟雾减光率和温度(即DD2)。在疏散问题中有关人员的最重要的信息是人员是否在安全的区域内,所以本研究在虚拟数字世界中只刻画人员的位置信息(即DD3),而其他如人员的性别、年龄、身高等信息都不在本孪生模型的考虑之内。室内环境信息可以通过传感器网络进行采集,室内人员位置信息可以通过UWB(ultra wideband)、蓝牙、Zigbee 等室内定位系统等进行采集。
2.2 BIM模型的处理
在本研究中,建筑信息来源于建筑物的BIM 模型。BIM模型高度集成了建筑工程项目中的各项相关数据,足以支撑疏散问题的解决[8-10]。而且BIM技术作为建筑行业内较好的信息化解决方式,已经得到了很广泛的应用。

图2 基于数字孪生的动态消防疏散引导方法Fig.2 Dynamic fire evacuation guidance method based on digital twin
冬奥场馆(即BPE)建设的过程充分利用了BIM技术,人工建立(即CN1)了较精细化的BIM 模型(即BVE),但是BIM 模型中的信息对于疏散来说十分复杂,在疏散问题中也不需要使用BIM 模型中的全部信息。为了实现受困人员能跨平台查看三维的室内布局,需要将BIM模型进行轻量化处理,只保留建筑物的三维形状信息,再运用WebGL技术将其搭载在网页上[8,23]。这样就可以实现在智能手机、平板电脑等移动设备(即CN4)上查看三维室内布局。
另外,为了满足优化算法对建筑联通关系高度抽象化的要求,本文借鉴并改进了Peng等[24]提出的一种将BIM 模型简化成面向疏散模型的方法。Peng等[24]把空间简化成点,使用线段连接的方式表示空间之间的联通关系。在此基础上,本文还把单一细长的交通空间细化成了多个关键的交通节点(如图3 中点2C5~2C9),使面向疏散的模型以空间拓扑结构的形式展现,主要包含各个房间的位置关系和交通关系。具体方法如下:
把房间简化成空间中的点;把关键的交通点也简化成节点;这里的关键交通节点主要包括通道的“T”字型岔口(如图3 中点2C9)、“十”字型岔口(如图3 中点2C8)和“L”字型拐点(如图3 中点2C13)。每个节点都会被编号,标号统一使用NXn 的形式表示。其中N 表示节点所在楼层号;X 表示空间种类,房间、走廊、楼梯分别用R、C、E 表示;n 表示节点的标号。两个相连通的节点之间用直线连接,节点间的距离代表两点间路径的距离,而不是直线距离。该拓扑结构只需要根据BIM 模型简化一次,如果建筑布局不变,完成后即可一直用于疏散路径的规划。

图3 雪车雪橇场馆某建筑的二层部分平面拓扑图Fig.3 Topography layout of the second floor part of a building in bobsleigh and sled stadium
2.3 室内环境信息危险等级评价
根据人体对于前文所述环境参数的生理反应,本研究对不同参数下的环境进行了危险等级的划分,如表1 所示。当某空间环境参数可致人麻木甚至死亡时,则该空间被认为是不可通行的,即对拓扑结构中的相应位置做出禁止通行的处理。

表1 室内环境的危险等级评价表Tab.1 Hazard rating for indoor environment
3 基于Dijkstra 算法的动态疏散路径规划
3.1 Dijkstra算法的改进
本文选用Dijkstra 算法作为疏散最短路径优化的规划算法,本算法能计算出给定的平面拓扑图中任意两个点的最短路径。传统的Dijkstra算法如下:
(1)设有一个无向图F=(S,T,D),其中D是图中两点间的间距集合,S和T是两个节点集合,如果源点到某节点的最短路径已经求解完成,则把该点储存在S中,未求解完成的点储存在T中。
(2)对T中的节点按照距离源点的距离大小进行排序,把距离最小的节点转存到S集合中,并记录最短的路径经过的节点,再把T中剩下节点重新排序,选出距离最小的节点。
(3)重复步骤(2)。
(4)当T为空集时,算法结束。
但是本研究中的规划对象是整栋建筑,它的拓扑结构是由多层平面拓扑图组成的,所以传统的Dijkstra算法无法满足对整栋建筑的路线规划要求。另外,传统的Dijkstra算法需要遍历源点与其他所有点的最短路径,而对疏散来说只需要求取起点到出口的最短路径即可。为此,本文对Dijkstra算法进行如下改进:
(1)输入按照2.2 中方法简化的拓扑结构,该拓扑结构中每层都有一个无向图,设第N层对应的无向图为FN,这些无向图组成的集合为f=(F1,F2,F3,…,FN)。
(2)无向图和源点的选取应该根据人员位置进行,以疏散人员所在的楼层为对象计算无向图,人员所在位置为计算源点;当人员所在楼层N和所在节点NXn 发生变化时,则计算无向图和源点作出相应的变化。
(3)当某一区域的环境危险等级达到Ⅲ级时,直接与相应位置节点相连的距离修改为无穷大。
(4)退出机制。在计算某一层无向图时,如果S中存在出口节点(楼梯对应的节点NEn),该层计算即停止,不必遍历所有节点;当人员位置在一层某出口1En时,整个疏散规划结束。
3.2 动态疏散路径规划过程
首先运用上文提到的面向疏散的模型简化方法,把建筑物的BIM模型简化成逻辑拓扑图;然后根据传感器采集的室内环境数据,对室内环境进行危险等级评价;并根据评价对无法通行的区域所对应的拓扑图进行相应修改。通过室内定位系统获得室内人员的位置,并以该位置所对应的拓扑节点为计算源点,运用上文提到算法对人员疏散路径进行优化,直到人员成功到达疏散出口,规划结束。
具体算法步骤如下:
Input:f=(F1,F2,F3,…,FN);人员位置NXn 和环境数据;出口节点集E
Output:“疏散路径为:”与NXn距离最小经过的所有节点
initial 集合S,T
while N≥1
调取FN
if 环境危险等级达到Ⅲ级
FN中与该节点相连的所有距离值赋值为∞
while S与E无交集
对T中节点按照与NXn距离大小进行排序
把距离最小的节点转存至S中
记录下与NXn距离最小经过的节点
更新人员位置NXn和环境数据
if NXn∈E and N=1
break
4 实验与案例研究
通过应用WebGL技术,雪车雪橇场馆某出发区的BIM 模型被装载到网页上,传感终端采集的数据也在网页端实现可视化,同时BIM 数据库和传感器采集的数据都被储存到网页数据库中。依据这些数据和改进的Dijkstra 算法实现环境监测、火灾报警、布局浏览、人员定位、疏散引导等功能。
4.1 室内环境信息采集
本文通过在室内布置采集室内环境参数的传感器,对室内环境(即EPE)进行实时监测,并结合室内环境的评价体系,对室内环境进行评价。该部分研究使BIM 与物联网进行结合,实现对室内环境的三维可视化监测。该部分主要研究用于采集室内环境参数的物联网系统与BIM 模型结合的可行性和稳定性。
本研究采用低功耗广域物联网(low-power wide-area network,LPWAN)中的LoRa(long range radio)技术进行环境信息采集的组网和传输(即CN2)。相较于其他物联网形式,它具有功耗低、电池使用寿命长、传输范围广等优点。为了实现对室内环境信息的采集,本研究开发了一套用于室内环境信息采集的终端,该终端由传感器模块、MCU(microcontroller unit)控制模块、LoRa通信模块和电源模块集成组成。其中传感器模块可以根据需要测定的信息种类替换成与之相对应的传感器。本研究选用的传感器参数如表2 所示。其中,当烟雾浓度达到使光每前进1英尺被遮挡0.65%~15.50%时,烟感传感器发出报警信号,不测量具体的数值,所以不存在精度。通过将上述模块进行集成,数据采集终端可以实现对室内环境信息的采集和上传。将开发的室内采集终端分布在测试房间中,对房间的信息进行实时的监测。图4是烟感传感终端的实物照片及其组成结构图。烟感传感终端需要放在房间内屋顶的正中央位置(见图5 屋顶传感节点的位置),其他传感终端需要部署在房间中部墙壁上距离地面2 m左右高度的位置(见图5墙壁传感节点的位置),每个房间每种传感器各部署一个。

图4 数据采集终端及其组成结构Fig.4 Data acquisition terminal and its structure

图5 LoRa传感终端布置图Fig.5 Layout of LoRa sensor terminal

表2 传感器参数Tab.2 The values of the sensor parameters
在数据传输方面,LoRa技术的网络搭建采用最基本的星型网络架构,利用LoRa 技术大容量的优势,可以实现将大量的传感器与LoRa 网关相连接。数据采集终端的传感器模块把建筑物内的环境信息通过内置的LoRa 模块传输给LoRa 网关。LoRa 网关再通过4G网络把数据上传到云端服务器,本地服务器和客户终端通过访问云服务器的形式获取室内环境信息,如图6所示。为了方便数据管理和查看,还开发了网页端的数据管理平台,在云平台中实现了对数据的记录和统计。

图6 基于LoRa技术的网络部署示意图Fig.6 Network deployment diagram based on LoRa technology
本研究将BIM 模型生成为IFC 格式的文件,并将其在JavaScript环境下解析读取,实现轻量化。利用WebGL 技术把BIM 模型搭载在网页上。把传感器的信息搭载在BIM 模型中,在网页端可以查看传感器所在位置的建筑三维情况(即EVE),如图7 所示。实验表明,开发的数据采集系统可以稳定地采集数据,并上传到互联网,其与BIM相结合也是可行的。根据采集的数据对室内环境进行危险等级的评价,当室内环境参数超过预定的安全值,系统就会发出警报。警报方式包括两部分,一部分是在网页端上发出警报标识,另一部分是通过LoRa连接的报警设备(即CN4)在房间中同时发出警报闪光和报警音响,如图8所示。

图7 在网页端查看环境数据信息及建筑布局Fig.7 Viewing environment data information and building layout on the web

图8 报警设备和网页端同时发出报警Fig.8 The alarm device versus the alarm sending and by web side
4.2 建筑物内人员位置信息采集
目前常用的定位技术是GPS、北斗等全球导航卫星系统(GNSS),但是由于受到建筑物的遮蔽和多径效应的影响,无法实现精确的室内定位,所以使用GNSS 实现对建筑物内人员(即PPE)的实时定位存在较大的精度问题。本文采用UWB技术(即CN3)对室内人员进行定位。
UWB 是一种使用1 GHz 以上带宽的无载波通信技术。它利用亚纳秒级甚至更快的脉冲进行时钟与距离分析,最终实现高精度实时定位的目的。将UWB定位设备布置在室内,就可以实现精准的室内定位。众多研究证实其定位精度可以达到厘米级[25],本文实验也得到了一致的结果,完全可以满足疏散引导的精度需求。此外,它还具有抗干扰能力强、结构简单、功耗低等优点。
UWB 定位系统主要由标签和基站组成,UWB标签可以高频重复地发送数据信号,数据信号可以被UWB 基站接收。基站可以通过有线或者无线传输的方式,把接收到的信号传输给后台服务器。服务器通过对数据的分析,得到标签的位置信息。UWB定位系统组成如图9所示。
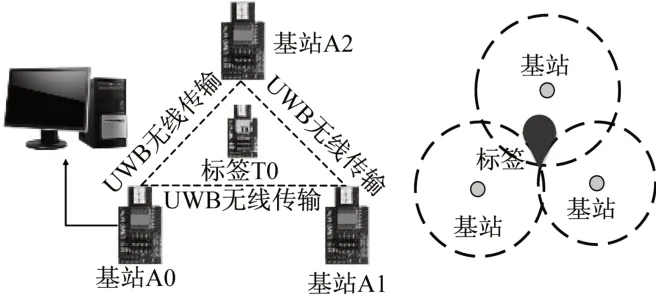
图9 UWB定位系统组成Fig.9 Composition of UWB-based positioning system
在空间较大的房间,布设3 个基站即可满足平面的定位(如图10 中基站6、7、8);在狭长的楼道可考虑在两端各布设一个基站,对人员在楼道里进行直线定位(如图10 中基站4、5);在空间狭小的房间可考虑布设一个基站,以确定人员是否在房间内即可(如图10 中基站1、2、3)。按此方式布设基站,第二层需要基站大约40 个左右,整栋建筑需要基站100个左右。
本研究重点关注UWB定位技术与BIM技术的融合性。在一间房间中布设了UWB 定位系统,把UWB采集上来的位置信息传递到云端,并在搭载于网页端的BIM 模型中实现人员位置的三维可视(即PVE),如图11 所示。实验表明,UWB 定位技术可以较高精度地采集室内人员的位置信息,且与BIM结合有很好的可行性。

图10 第二层部分基站平面布置图Fig.10 Layout of some base stations on the second floor

图11 人员携带标签位置在网页端的BIM模型中展示Fig.11 The display of location of people’s carrying label in BIM model of web page
4.3 改进的Dijkstra算法应用效果
以冬奥会延庆赛区雪车雪橇场馆中的某建筑为例,使用“面向疏散的模型简化方法”对该建筑的结构进行了拓扑模型的简化,第二层的单层拓扑图如图3所示,整个建筑物的拓扑结构图如图12所示。
以不可通行的危险情况发生在2E2 处为例,使用第2 节中改进的Dijkstra 算法对疏散路径进行了规划。首先将每层中的拓扑无向图用矩阵表示,矩阵中的数字代表其行标节点号与其列标节点号之间的距离。第二层的部分节点拓扑矩阵如图13所示,各节点之间的连通距离用矩阵的形式表示,然后与2E2节点直接相连的距离改为无穷大,如图13所示,这样在用算法计算时路径时,就可以规避危险发生的位置。
人员起点位于不同房间时,将经算法优化前后的数据进行对比,结果如图14所示。由图14可以看出,本算法能有效缩短疏散路径。本文着重以人员在2R5 房间(情况1)和2R4 房间(情况2)为例,如图15 所示,分别分析该优化算法的效果。路径和效果分析如表3所示,三维路径结果如图16所示。
以疏散人员速度为2 m·s-1为例,在情况1中,算法优化后的路径可节省疏散路程24.0 m,节约时间12.0 s;在情况2 中,算法优化后的路径可节省疏散路程17.2 m,节约时间8.6 s。由此可以看出,使用该方法可以有效地减少受困人员的疏散距离,减少疏散时间,提高疏散效率。当无系统引导时,受困人员会因不了解危险所处的位置而就近寻找出口逃生,在逃生过程中发现危险时,又折返寻找其他出口,这个过程就造成了疏散时间的浪费。而该系统通过对室内环境的实时监测,可以确定哪些是危险且不可通行的区域。

图12 建筑物的拓扑结构图Fig.12 The topological structure of the building

图13 第2层的部分节点拓扑矩阵Fig.13 The topological matrix of partial nodes in the second layer

图14 算法优化前后不同起点人员疏散距离Fig.14 Evacuation distance from different starting points before and after algorithm optimization
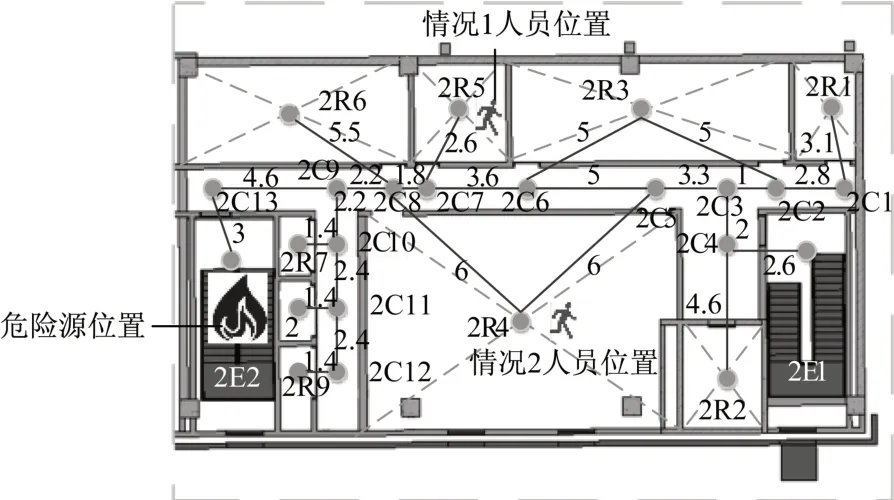
图15 第二层部分平面拓扑及两种情况的示意图Fig.15 Part of the second plane topology and two cases of schematic diagram
在规划疏散路径的时候,考虑危险的因素,可以避免因不了解危险位置而造成的盲目逃生。所以当人员处于位置靠近危险源的房间时,路径优化效果较明显。
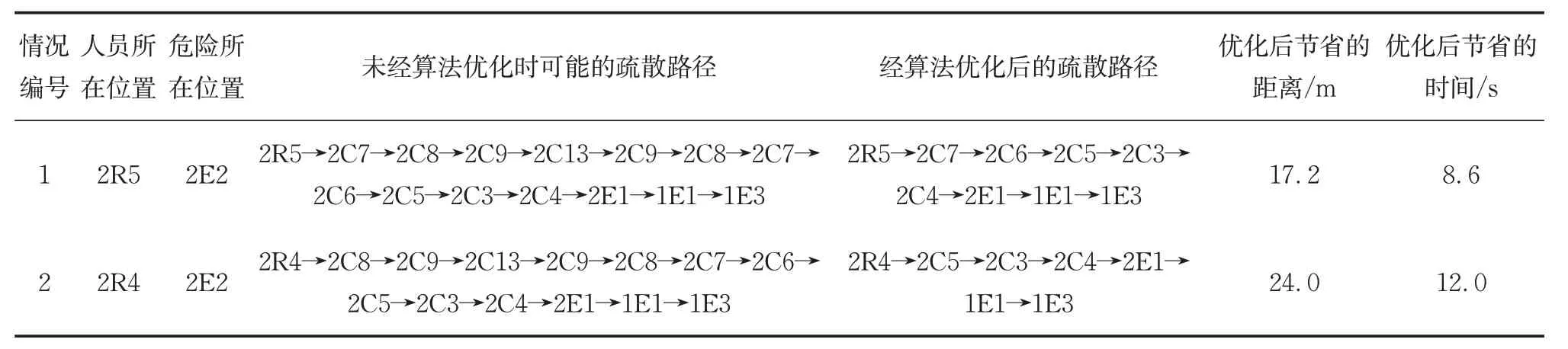
表3 两种情况下算法优化前后的效果分析Tab.3 Effect analysis before and after algorithm optimization in two cases

图16 两种情况下有无算法引导疏散路径的比较Fig.16 Comparison of evacuation paths with or without algorithmic guidance in two cases
为了能够更好地引导受困人员进行疏散,本研究采用二维与三维相结合的方式,把疏散路径展示在搭载于网页端的BIM 模型中,效果直观,如图17所示。受困人员通过智能手机、平板电脑等移动智能设备(即CN4),访问互联网网页即可获得在线的疏散指导(即SS)。
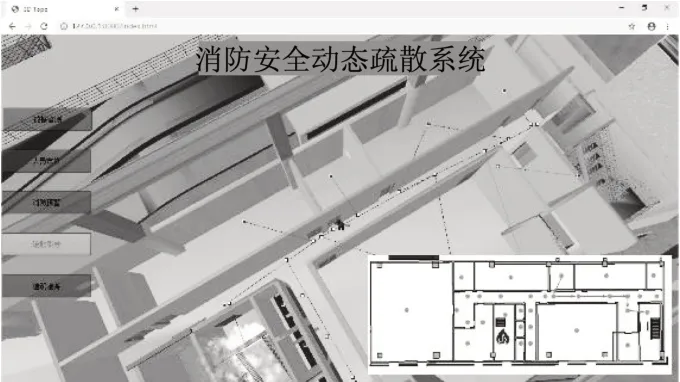
图17 二维与三维相结合在网页端进行疏散引导Fig.17 Two-dimensional and three-dimensional evacuation guidance on the web
5 结语
本文基于数字孪生概念提出了建筑室内安防方案框架,并综合运用BIM 和物联网技术以及优化算法解决了该框架下的消防疏散引导问题。该方案拥有以下的优点:
(1)通过利用传感器采集信息的方式,达到了对火灾发展态势的实时监测。
(2)在规划疏散路径时,不仅考虑了室内的危险区域,还考虑了人员在建筑物内的位置信息,使优化的疏散路径更具有针对性。
(3)针对建筑物内火灾疏散应用场景,对Dijkstra 算法进行了改进,对疏散路径进行自动规划,提高了疏散引导的效率和合理性。
(4)利用BIM技术的三维可视功能,实现了疏散引导的二维与三维相结合表达,改善了引导效果。
从以上的研究可以看出,运用数字孪生理论解决建筑物消防安全问题是可行的,BIM 与物联网结合是建立面向消防疏散数字孪生模型的有效手段,在未来具有广阔的应用前景。另外,今后还将基于数字孪生概念研究建筑安防领域中的其他问题,提高建筑安防自动化和智能化水平。
