RTK无人机在电力系统中的应用
2020-07-27张代宾
马 东, 张代宾
(辽宁省电力有限公司本溪供电公司,辽宁 本溪 117000)
全面、多方位、多角度开展立体式巡检,及时准确的发现电网存在的缺陷和隐患,为电网运行管理和故障分析提供正确的依据,是确保电网安全稳定运行的一项基础性工作。传统的人工巡检工作方式不仅难以对设备进行多方位、多角度观察,而且非常困难和辛苦,劳动强度大,工作效率和巡检质量低,特殊天气和特殊环境给巡检人员带来安全隐患。采用无人机自主飞进行电力线路巡检,可极大地提高巡检工作的效率和质量,使电力巡检工作发生重大变化。目前电网运行管理中已经广泛采用无人机巡检,并从人工手动控制无人机巡检向无人机自主飞行巡检方面快速发展。
本文在介绍无人机自主飞行巡检原理和流程的基础上,重点介绍RTK无人机的特点和应用以及未来发展方向。
1 无人机自主飞行巡检的工作原理和流程
无人机自主飞行巡检采用航点飞行模式控制,依靠 WGS-84坐标导航。航点的经度、纬度、高度是无人机自主飞行的三个必要的基本参数。在实际飞行巡检工作中,为了使无人机正确的完成起飞、巡检、降落过程,还需要提供其它相关飞行数据,主要是无人机起降点三维坐标、杆塔中心点三维坐标、杆塔结构参数等。巡检前根据上述参数和巡检工作的需要,采用航线编辑软件生成航线,将航线导入移动端设备,通过飞行控制软件控制无人机到达指定的位置,按照给定的航向和云台角度多方位、多角度进行拍照或录像,为运行和管理提供高清晰的影像资料,及时发现电力线路存在的缺陷和隐患。
2 RTK无人机的特点和应用
2.1 RTK无人机的特点
RTK(Real - time kinematic)是实时动态差分技术的简称,其定位精度可以达到厘米级。无人机采用了RTK技术后,航点定位精度即可控制在厘米级,同时无人机拍摄的照片中包含拍摄位置的WGS-84坐标信息。RTK无人机的高效性和准确性完全适用于电网杆塔的坐标采集和自主飞行巡检工作。如图1和图2所示。

图1 Phantom 4 RTK 无人机

图2 无人机拍摄照片的信息
2.2 RTK无人机在电网巡检中的应用
如上所述,无人机自主飞行依靠 WGS-84坐标导航,坐标误差直接影响无人机工作位置的准确性,自然就会影响到照片和录像的质量,甚至会影响安全飞行。如果需要近距离拍摄清晰的影像,必须有准确的航点坐标和无人机精准的定位功能。RTK无人机的功能完全符合电网自主飞行巡检工作要求,可以广泛使用。
1)应用于杆塔坐标采集
RTK无人机定位精度达到厘米级,照片中包含拍照位置的WGS-84坐标信息,如图2所示。通过在杆塔正上方拍摄一张照片,在杆塔侧面以杆塔高度拍摄一张照片,通过这两张照片,就可以提取到杆塔中心点的水平坐标(经度、纬度)和杆塔顶端的高程,减去杆塔高度后即可获取杆塔基础的地面高程,从而得到杆塔中心点的三维坐标(经度、纬度、高程),为无人机自主飞行巡检提供了基础数据。多基杆塔的坐标可通过相应软件批量提取和处理。拍摄方法见图3和图4所示。
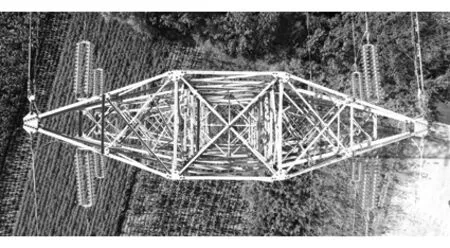
图3 杆塔中心点拍摄方法

图4 杆塔顶端高程拍摄方式
2)应用于电网自主飞行巡检
应用无人机进行电网自主飞行巡检时,可以分为普通巡检模式和精细巡检模式。普通巡检模式主要用于杆塔主体和通道巡视,无人机相对设备的安全距离可以适当增大,可以采用普通无人机。在精细巡检模式时,需要对设备的每个重要部位进行详细拍照,尤其是类似于销钉级的缺陷,必须清晰拍照。因此要求无人机必须近距离高精度定位拍照。
普通无人机定位误差:水平±1.5m
垂直±0.5m
RTK 无人机定位误差:水平±0.1m
垂直±0.1m
综合考虑杆塔坐标误差、无人机定位误差和安全距离等综合因素,普通无人机设定的拍照位置,必须距离设备7m以上,实际拍照时距离可能达到8.5m以上,这样照片的清晰度就难以达到要求。RTK无人机设定的拍照位置,距离设备最近可设置为3m,实际拍照时位置误差可以忽略不计,能够清晰拍摄到设备细节,如销钉是否安装或脱落等,因此精细巡检时应优先选用RTK无人机。
在实际巡检作业时,一般将无人机飞行参数设定为:自动飞行速度10m/s,高度安全裕量8m,水平拍照距离5m。飞行轨迹为由起点到终点进行线路通道录像,由终点到起点逐基杆塔拍照,最后返回起飞点降落。通过无人机存储设备的视频和照片,可以清晰准确地看到线路通道和线路本体是否存在缺陷和隐患。
图5 RTK无人机拍摄的照片
3)起飞和降落位置更加灵活
无人机自主飞行采用的是相对高度控制,航线中包括起飞高度HQ、航点高度HP,实际起飞地点的高度假设为HE,实际飞行高度为H,则:
H=HE+(HP-HQ)
(1)
HP和HQ是设计航线时实际测量的某个航点和起飞降落地点的WGS-84坐标系的高程,只有实际起飞地点的位置和设定的起飞地点位置相同时,HE=HQ,H=HP,保证实际飞行高度等于设定的飞行高度。否则会产生高度误差。在实际飞行工作中,由于操作人员错误选择了起飞位置,就会产生高度误差,当高度差HQ-HE的数值较大时,就会严重影响拍摄照片的质量甚至影响安全飞行,损坏无人机。因此起飞地点的选择要求非常严格。
RTK无人机则不同,因为其具备高精度定位功能,开机后进入差分状态后,可自动记录起飞地点的地面高程,飞控程序调用函数HE=rtkState.getTakeOffAltitude(),当飞控程序检测到RTK无人机的起飞地点高度HE后,自动将航线中的起飞高度HQ的数值调整为HE,从而保证实际飞行高度H=HP,与航线设定的飞行高度相同。这样,起飞地点就不受限制,高度自动调整,使得自主飞行更加准确,更加安全。同时高精度定位功能也能保证无人机准确降落在起飞位置。
3 结论
RTK无人机因其具备高精度的定位功能,可广泛应用于电网自主飞行巡检工作的全过程。在杆塔坐标采集,自主飞行任务执行方面均体现出优良的品质。同时在电网运行管理中,通过应用RTK无人机进行自主飞行巡检,可进一步完善和健全设备基础资料,使之更加准确,同时还具备了影像资料。
通过应用RTK无人机开展二维正射影像和三维建模工作,一是可以对输电线路通道形成清晰准确的影像资料,防止输电线路通道被非法侵占或破坏。二是可以通过三维模型,快速准确的测量出树木、建筑物等对导线的安全距离,防止意外发生,确保电网安全运行。
