舰船混沌运动的改进自适应Backstepping控制*
2020-07-27周红进韩云东
黄 谦,周红进,金 鑫,韩云东
(海军大连舰艇学院,辽宁大连 116018)
处于海上复杂环境中的舰船在航行过程中受到多种不同外力的扰动,不可避免会产生艏摇、横摇等运动。研究发现,舰船在海上航行过程中出现的非线性混沌运动是导致其不能实现高精度直航向航行的重要影响因素。这种混沌运动容易导致舰船偏离航向或失控,必须予以消除或转变为影响较小、较易控制的周期运动[1-2]。
自1990年Ott等人提出混沌控制的OGY方法[3]起,各种混沌控制方法被陆续提出,例如,延迟反馈控制、PID控制、脉冲控制、自适应控制等[4-6],这些研究为舰船混沌运动的控制提供了良好的理论基础[7-8]。但由于混沌系统自身特点,目前,许多方法对复杂非线性混沌系统的控制往往不能达到令人满意的控制效果,对于参数未知或变化的舰船混沌运动更是如此。本文作者曾经探讨了一种舰船混沌运动的PID控制方法,实现了舰船混沌运动的稳定控制[9],但该方法的前提是确定的系统模型参数,一旦舰船混沌运动模型参数发生变化,原有PID控制器就可能无法实现对舰船混沌运动的有效控制。
为了解决舰船混沌运动中的参数不确定性问题,本文在某型舰船转艏操纵运动非线性模型的基础上,将Lyapunov稳定性理论与Backstepping方法相结合,提出了一种改进自适应Backstepping混沌控制方法。该方法实现了将混沌系统状态变量控制到不动点上的目的,而且具有良好的参数辨识性能,对舰船混沌运动的控制具有重要价值。
1 舰船混沌运动模型及问题描述
研究表明,在实际舰船运动过程中,由于操舵伺服机构及舰船本身等多方面因素的影响,舵角和转艏角速度之间存在较大的非线性关系。为了使舰船模型更接近实际情况,Bech经过深入研究及合理假设,得到了适用于一般海上舰船的操纵运动非线性模型[9]。根据Bech非线性模型,本文作者在前期研究中,以保持直航向航行的海上舰船为研究对象,抓住舰船动态从舵角到舰船转艏角速度的主要环节,考虑舰船航行过程中的浪力等效舵角,并对舰船转艏角速度做比例反馈控制,得到舰船转艏操纵运动非线性响应的通用数学模型[10],如式(1)所示。
(1)
其中,x=[x1,x2]T∈R2,x1∈R分别为系统状态变量及输出量,x1是舰船转艏角速度,x2为舰船转艏角加速度;a、b、c、d、e为系统模型参数。相关的先期研究表明,当船的阻尼项系数和刚度项系数相差不是很大时,通过反馈增量的补偿,阻尼项系数和刚度项系数是同一数量级,在给定值较小的情况下,系统将进入非线性混沌状态,即舰船在航向保持过程中会出现混沌现象[10]。
本文以某型舰船为研究对象,计算其相应参数得出该型舰船转艏操纵运动非线性响应模型如下:
(2)
对该模型进行数值仿真实验,仿真步长取0.001 s,系统初始值取(x10,x20)=(0.3,0.3),舰船初始航向090°,仿真运行800 s,绘制出系统相位图、系统庞加莱截面映射图和舰船航向时序图,如图1~3所示。

图1 系统相位图
从图1、图2可以看出,该型舰船的转艏操纵运动非线性响应模型具有典型的混沌系统特征。从图3可以发现,舰船在把定舵角为零的情况下,其航向无法保持在指定的初始航向090°上,呈现典型的振荡。因此,必须对舰船转艏操纵运动中的混沌现象进行控制和消除,从而实现舰船的高精度航向保持。

图2 Poincaré截面映射图

图3 舰船航向时序图
2 舰船混沌运动的改进自适应Backstepping控制
大量的研究发现,一些非线性系统,如Duffing振荡、Van der Pol振荡、Rössler系统等,可表示为如式(2)所示的非自治“严格反馈”系统[11-12]。

(3)

对于如式(1)所示的舰船转艏操纵运动非线性响应模型,其受控系统可写为如下形式

(4)

将式(4)与式(3)所示的非自治“严格反馈”系统相比较,可得

(5)
对于本文研究的舰船转艏操纵运动非线性响应模型,其混沌运动控制器设计步骤如下。
第一步,定义误差变量:

(6)
其中,a1为虚拟控制。利用自适应Backstepping方法设计控制器u。


(7)
取Lyapunov函数

(8)
对V1求导,有

(9)


(10)
取Lyapunov函数

(11)
其中,r为正常数,对V2求导,则有

(12)

(13)
取舰船混沌运动控制输入量u为

(14)
第五步,针对采用自适应Backstepping方法对系统模型参数辨识不准确的问题,本文在选取控制器参数自适应律时,引入参数估计误差补偿项,经改进的参数自适应律如下:
(15)


(16)

(17)


(18)
证明:
对于误差系统(17)存在Lyapunov函数V,
(19)
可知,V>0,对其进行求导,可得

(20)



3 仿真实验及分析

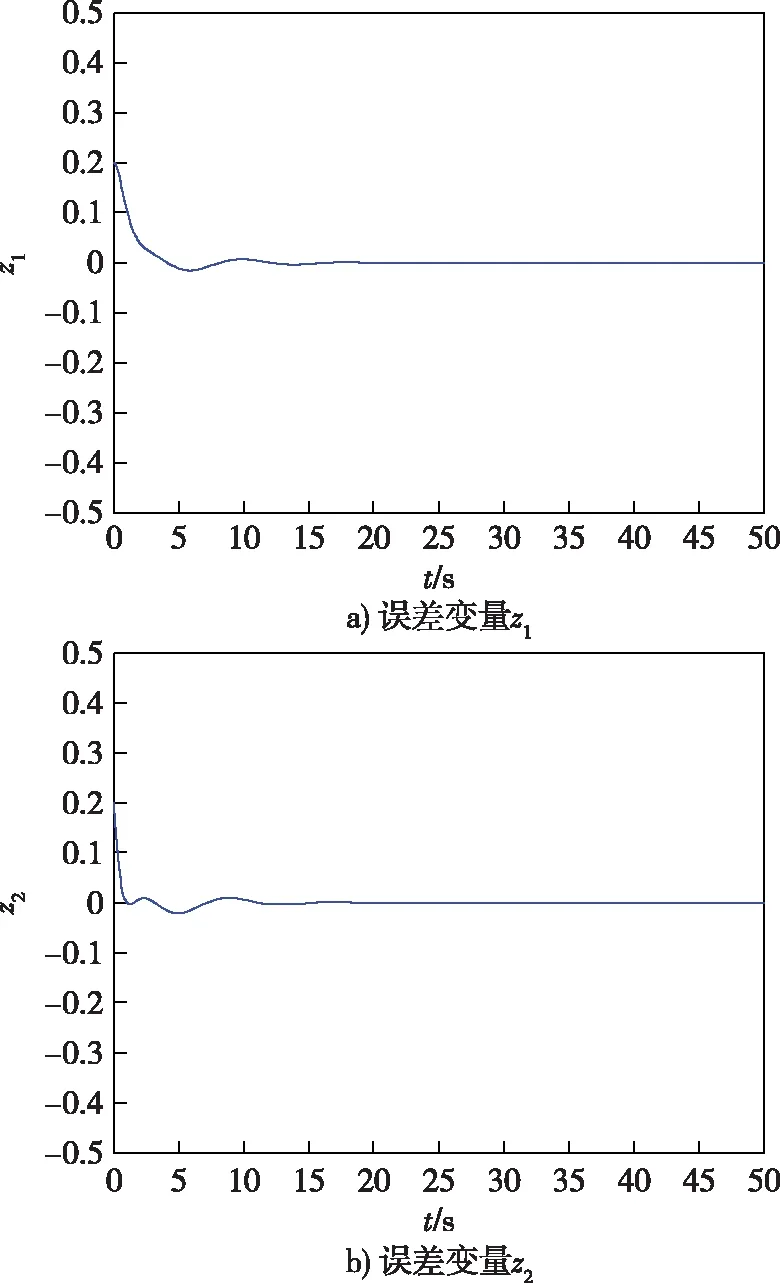
图4 误差变量时序图


图5 状态变量时序图

图6 舰船航向时序图

图7 控制作用u

图8 系统参数辨识的收敛曲线
4 结束语
对舰船转艏操纵运动而言,其非线性运动模型中各参数会随着舰船的航速、吃水、海水密度等影响因素的改变而变化,这导致了模型参数的不确定性。本文针对这一模型参数不确定问题,采用自适应控制技术实现对混沌运动的控制。为了克服采用一般自适应Backstepping方法进行舰船混沌运动控制器设计时存在的部分系统参数无法准确辨识的不足,在理论分析基础上,提出了一种基于改进自适应Backstepping的混沌控制方法。该方法可以实现对系统关键参数未知的舰船混沌运动的稳定有效控制,并做到对舰船混沌运动非线性响应模型中不确定参数的良好辨识,为舰船航向的高精度保持提供了一种可供参考和实现的有效途径。
