车载Li DAR和传统勘测在高速公路改扩建工程中的应用和对比
2020-07-25江智云
江智云
(浙江省交通规划设计研究院有限公司,杭州310030)
1 引言
高速公路改扩建工程需对既有公路平、纵面线形进行测量,需在左右幅中央分隔带边缘和右侧硬路肩外边缘4 条线沿同一横断面线上布设测点[1]。设计人员根据左右幅中央分隔带边缘测点进行平、纵精确拟合,对测点平面和高程精度有较高的要求,尤其是高程,例如,京藏高速公路石嘴山至中宁段改扩建工程等项目提出平面精度优于5cm,高程精度优于2cm 的勘测要求[2,3]。实际上,在运营阶段的高速公路上实施高精度高程测量,存在较大的难度和安全风险。
高精度车载LiDAR 测量技术已广泛应用于高速公路改扩建工程中,并有较成熟的应用经验[4],常用传统公路勘测方法包括GNSS-RTK 测量、全站仪测量和水准测量[5]。笔者依托浙江省某高速公路改扩建项目,对2 种勘测方法的高程精度、效率、安全保障投入3 个方面进行对比,提出高速公路改扩建路面勘测方法的建议,对改扩建项目中如何进行路面勘测具有一定的参考意义。
2 方法应用
2.1 工程概况
某高速公路改扩建工程全长约137km,初测采用车载LiDAR 测量,从激光点云数据中获取中央分隔带边缘白色热熔实线(测点1)、各行车道虚线(测点2)、硬路肩左侧白色热熔实线(测点3)和硬路肩右侧外边缘沥青路面线(测点4)等特征点。定测采用四等水准结合全站仪免棱镜测量方法进行路面复测,连续复测其中约100km。
2.2 车载Li DAR测量应用
2.2.1 应用概况
沿高速公路硬路肩间隔1km 布设1 个靶标,靶标测量采用RTK 高程控制测量方法进行,高程采用RTK 高程。分4 段进行数据采集,最长一段39km,每段架设2 个GNSS 基准站,每个基准站能够覆盖半径10km 范围,GNSS 基准站接收机静态数据采集间隔1s,测量车辆以40km/h 的速度行驶于硬路肩。点云数据经靶标控制校正后,以整20m 桩号提取各测点空间坐标。
2.2.2 误差情况
上述方法获取的点云高程精度为基于RTK 高程,在每2 个标靶中间增设一个检核点,检核点采用RTK 碎部测量,用于检查激光点云与RTK 高程测量差值情况。共检查372 点,最小差值-1.6cm,最大差值5.5cm,中误差2.01cm。其中,误差≤±2cm 的共214 点,占比57.53%;误差>±2cm 且≤±3cm 的共140 点,占比37.63%;误差>±2cm 且≤±3cm 的共18 点,占比4.84%。
2.3 传统勘测方法应用
2.3.1 应用概况
先采用四等水准将水准高程从控制点引至硬路肩上,并设转点,再采用RTK 放样整20m 倍数桩号横断面上的测点3 和4,并用红漆标注,为确保作业安全,将测点3 向测点4 平移0.6m,测量水准转点坐标用作全站仪测站点和定向点。接着四等水准沿硬路肩施测,按照“后—后—前—前”的顺序观测,测站过程中同步记录各测点读数。全站仪完成设站和定向后,先对定向点观测数据记录,再采用免棱镜对测站的测点1 和行车道线进行碎部测量,测点间距控制15m 内。四等符合水准完成后,平差计算各读数改正值,对各点进行水准高程改正,获取水准高程。
2.3.2 误差情况
完成四等附合水准路线35 条,最长8.31km,最大符合闭合差19mm,经平差计算后,各转点相对邻近高程控制点精度达毫米级。测点3 和4 与四等水准前后视同站观测,经改正后其精度亦能达毫米级。
免棱镜对白色物体反射效果最好,精度达毫米级,与测距呈正比[6]。全站仪定向距离≤140m,碎部点距离≤70m,碎部点距离≤1/2 定向距离,理论上碎部点高程测量误差≤定向高程差值。随机抽取300 组全站仪定向高程差值,占总测站数19.6%,最大差值+19mm,最小差值-14mm,中误差8.4mm。
20m 倍数桩号断面上测点1 往往需要通过相邻两碎部点通过内插获取。随机抽取相邻连续3 点数据100 组,点相互平均间距14.6m,通过首尾两点内插获取中间点内插高程(最弱点)对比实测高程。差值绝对值最大为20mm,大于10mm 数据3 个,其余均小于10mm,内插最弱点中误差为7.43mm。
综上所述,测3 和4 高程相对邻近高程控制点误差为毫米级,最接近真值。通过免棱镜内插获得测点1 精度最弱,相对测点4 精度能够控制在2cm 内。
3 对比分析
3.1 精度对比
3.1.1 靶标高程对比
初测阶段靶标和检核点使用RTK 高程,定测阶段利用测点3 和4 进行内插获取对应点位水准高程。左右两幅各对比329 组数据,左幅中误差4.08cm,右幅中误差4.22cm,左右幅差值趋势基本一致,如图1 所示。
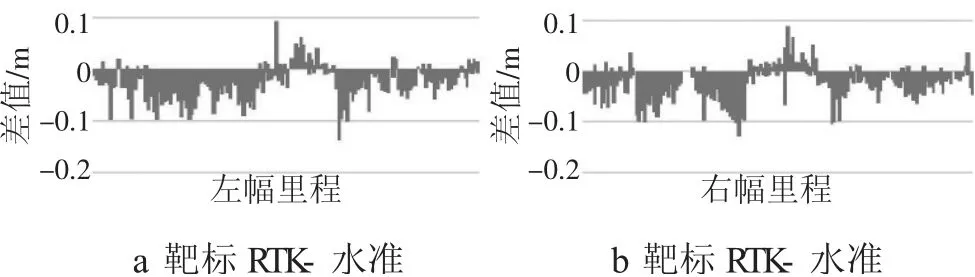
图1 左右幅靶标两阶段高程差值柱状图
差值大于±3cm 双向共291 处,其中198 处周边存在(高)边坡或上跨天桥或两侧植被茂密情况,有GNSS 信号受干扰的情况。在桥台前后,存在个别误差大于±5cm 的情况,系测量车经过桥台伸缩缝存在震动所致。说明高精度要求的高程测量,不宜采用RTK 方法,宜采用水准测量,周边存在边坡等障碍物对RTK 高程影响较大。
3.1.2 测点1 高程对比
车载LiDAR 测量在硬路肩进行,测点1(即公路纵面高程点)距离最远,相对精度最弱,左右幅各对比5 200 余组数据,2 个阶段差值呈正态分布,详见表1。左幅差值算术平均值为+0.79cm,中误差为3.11cm;右幅差值算术平均值为+1.17cm,中误差为3.84cm。

表1 两阶段测点1 高程差值统计表
除个别测量数据问题造成的粗差,通过对比2 个阶段测点1 高程差值与靶标、检核点高程差值之间的关系,其趋势基本一致,如图2 所示(以右幅为例)。说明基于靶标RTK 高程校正的点云高程精度基本等同RTK 精度,点云高程精度取决于靶标高程精度。

图2 2 个阶段测点1 差值与靶标差值对比图
3.1.3 单幅路面两侧高差对比
单幅路面两侧高差即测点1 与测点4 高程之差,平均间隔1km 抽样,左右幅共对比188 组数据。左幅最小差值-0.47cm,最大差值7.64cm,平均差值3.07cm;右幅最小差值-1.72cm,最大8.16cm,平均差值2.75cm;差值与路面宽度呈正比。差值≤1cm 和≥5cm 各10 处,占比5.3%;差值>1cm 且≤3cm,106 处,占比56.4%;差值>3cm 且<5cm,62 处,占比33%。
点云获取的高差较全站仪免棱镜测量的高差整体偏大2~4cm,差值存在一定的系统性。利用路面横向坡度理论值2%进行核查,点云坡度大于2%,占77%,平均坡度2.19%,免棱镜测量平均坡度1.94%。说明点云获取的高差存在偏高的可能性,传统勘测获取的高差精度较为可靠。靶标高程控制沿硬路肩呈线状布设,有必要在路面横向(中分带处)进行高程校正点布控,使高程控制呈网状,以提高测点1 的精度。
3.1.4 提高点云精度的方法
提高点云精度,靶标高程需采用四等水准联测,且布设越密越好。文献[2]和文献[3] 提出靶标间距为200m 的方案,根据实际作业情况,在硬路肩上进行四等水准测量,建议直接利用四等水准各站前后视(其间距小于200m)高程和间隔1km 采用全站仪免棱镜多测回方法获取中分带白线空间坐标作为点云高程校正点使用。
3.2 效率对比
2 阶段各投入2 组作业人员,投入情况如表2 所示,若采用结合四等水准的车载LiDAR 测量,需增加作业员2 人,增加10~12 工日。实际工作中,传统方法外业作业受天气、节假日和交通管控等影响,历时51d 完成。如表2 所示,不管采用何种车载LiDAR 测量方法,外业效率均大大高于传统勘测方法。
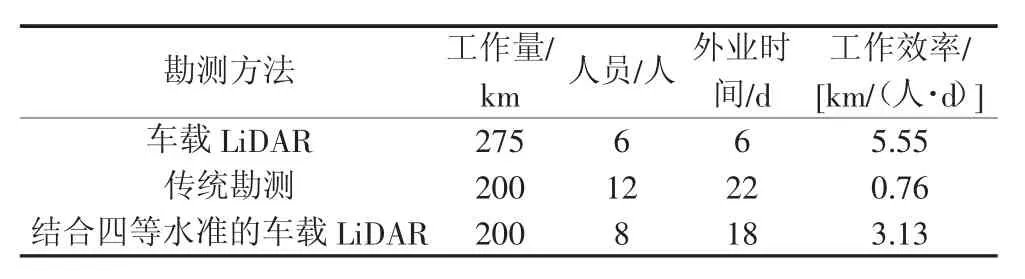
表2 作业效率表
3.3 安全保障投入对比
为对交通影响降至最低,将工作区域设定在硬路肩。车载LiDAR 测量采用预警车跟随预警方式进行,投入预警车1 辆/组即可。传统勘测方法采用硬路肩临时封闭方式进行,每次封闭2km,封闭3h,每日封闭2 次,至少投入预警车2 辆/组、配合封道人员3 人和警示锥等资源。若靶标采用四等水准测量,亦需采用硬路肩临时封闭方法,单次封闭时间约可缩短一半。
4 结论与建议
综上所述,得出以下结论和建议:
1)采用本文提出的传统勘测方法高程能够满足相对邻近高程控制点高程中误差2cm 的要求,但外业作业效率低,内业数据处理工序烦琐,数据复杂,极容易造成数据错误,投入安全保障资源大,采用硬路肩临时封闭对交通有一定影响,受天气、交通管制等制约因素多,工期、进度难以掌控。
2)车载LiDAR 测量作业效率较传统勘测方法高数倍,上路作业时间短,安全风险相对较低,长里程改扩建项目宜采用结合四等水准测量的车载LiDAR 测量。
3)车载LiDAR 测量获取点云高程精度取决于靶标高程精度,获取高精度高程须进行靶标四等水准测量,加密布设高程校正点。高速公路硬路肩进行四等水准测量,存在水准路线穿越互通、枢纽匝道分(合)流口,存在较高安全风险。中分带高程校正点采用水准测量,存在横穿高速主线的极大安全风险,建议利用免棱镜多测回方法获取。
4)对于高程精度优于2cm 的勘测要求,不宜使用GNSSRTK 高程,只能采用水准测量建议设计人员根据实际需求提出合理的高程勘测精度要求,比如,提高结构物高程精度要求,降低路基路面高程精度要求。
5)施工阶段后期的沥青路面施工,高程精度需达毫米级,设计阶段根据勘测纵横断面数据进行造面工程量控制较为困难,建议在施工阶段结合路面特征碎部点水准成果进行纵坡拟合的动态设计。