一种基于意图辨识的无刷直流电机电子制动控制方法
2020-07-23王正家刘颖文淑容孙楚杰何涛
王正家 刘颖 文淑容 孙楚杰 何涛
摘 要: 针对无刷直流电机(BLDCM)电子制动方式的制动强度不可控、制动系统作用时间过长等问题,提出一种基于意图辨识的无刷直流电机电子制动控制方法。基于制动踏板行程及行程变化率设计一个模糊逻辑控制器,建立制动强度与制动意图的对应关系,并对制动强度进行识别,利用不同的制动意图选择最佳的制动方式,再通过制动强度控制制动时的占空比,从而动态调节电机制动力矩,以实现无刷直流电机电子制动的可控性和快速性。应用Matlab/Simulink进行BLDCM制动控制系统仿真模型设计,并得出了不同制动意图下电机转速变化的仿真结果。仿真结果表明,所提方法能使制动系统快速响应,并能实现系统制动的可辨识性。
关键词: 无刷直流电机; 意图辨识; 模糊逻辑控制器; 制动强度; 制动方式; 仿真模型
中图分类号: TN876?34; TM33 文献标识码: A 文章编号: 1004?373X(2020)05?0101?04
An electronic brake control method based on intention identification
for brushless DC motor
WANG Zhengjia1, 2, LIU Ying1, 2, WEN Shurong3, SUN Chujie1, 2, HE Tao1, 2
(1. School of Mechanical Engineering, Hubei University of Technology, Wuhan 430068, China;
2. Hubei Key Lab of Modern Manufacture Quality Engineering, Wuhan 430068, China;
3. Hubei Institute of Quality Supervision and Inspection, Ezhou 436070, China)
Abstract: In view of uncontrollable electronic braking strength and too long application time of the braking system of brushless DC motor (BLDCM) electronic braking mode, an electronic brake control method based on intention identification for BLDCM is proposed. In this method, a fuzzy logic controller is designed based on the brake pedal stroke and the stroke change rate to establish the corresponding relationship between the braking strength and the braking intention. Then the braking strength is identified, and the optimal braking mode is selected according to different braking intentions, and then the duty ratio during braking is controlled by the braking strength, thereby the braking torque of the motor is adjusted dynamically to achieve the controllability and rapidity of the electronic braking of the BLDCM. The simulation model of BLDCM brake control system is designed with Matlab/Simulink, and the simulation results of motor speed changes under different braking intentions are obtained. The results show that the proposed method can make the braking system respond quickly and realize the identifiability of the system braking.
Keywords: BLDCM; intention identification; fuzzy logic controller; braking strength; braking mode; simulation model
0 引 言
無刷直流电机(BLDCM)由于其无换向器、调速性能好等优点,已在伺服领域以及电动车上得到广泛的应用。BLDCM在运行过程中,根据运行情况需要减速或制动。常见的制动方式有机械制动和电子制动,其中,电子制动方式包括能耗制动、反接制动和回馈制动[1?2]。机械制动方式简单可靠,但由于采用了较多的机械传动机构,导致制动间隙较大、传动效率降低、响应速度慢、成本高等问题;而电子制动方式解决了以上问题,缩短了制动时间,使BLDCM制动具有更好的性能,并且得到了广泛的应用。
目前,对于无刷直流电机在电子制动控制方法的研究主要集中在回馈制动[3?4]、反接制动[5?6]以及混合制动[6?7]等方向。回馈制动虽能回收能量至储能装置,但其制动转矩会随着电机的转速降低而减小,导致低速时的制动效果不理想;反接制动效果最好,采用脉宽调制的方法虽可以有效地控制制动电流,但制动时需消耗电源功率,且对驱动电路冲击较大;混合制动是一种将回馈制动和反接制动相结合的方法,该方法既能在高速时回馈能量,又能在低速时保持一定的制动力矩,但这种方法是通过设定一个临界转速来切换制动方式的,如果需要紧急制动或者缓慢制动时,此方法很难按照要求实现,制动的可控性比较差。
本文在分析BLDCM电子制动控制方法的基础上,结合各种制动方式的优势,提出一种基于意图辨识的BLDCM电子制动控制方法。该方法是基于制动踏板位移行程及行程变化率,设计了一个模糊逻辑控制器,进行制动强度[8]的识别,并建立制动强度与制动意图[9]的对应关系,通过制动强度来控制制动时的占空比,从而动态调节电机制动力矩,再利用不同的制动意图选择最佳的制动方式,以实现BLDCM电子制动的快速性和可控性。
1 制动意图表征分析
1.1 制动意图分类
车辆在行驶过程中所处的环境是由驾驶员、车辆和行驶环境组成的一个闭环系统,驾驶员是闭环系统的控制器。制动意图(BI)是驾驶意图的一部分,是驾驶员对车辆进行减速操作的一种意图。根据驾驶员对车辆的操作特性、道路交通条件的变化以及车辆行驶状态的变化,将制动意图分为四种[10]:紧急制动、调节制动、持续制动和目标制动。
本文只需要定性地识别出制动的紧急程度,因此,根据驾驶者实际的制动情况,可以将制动行为分为三类:缓慢制动、中等制动和紧急制动。
1.2 制动意图与制动强度的关系
一般来说,驾驶者的制動意图是由驾驶行为实现的,而踩制动踏板是最基本的操作,将此操作参数化后就是制动踏板行程和制动踏板行程变化率,这些参数可以作为BLDCM制动控制系统的输入。
制动强度是制动效能因素,也就是制动系统的制动能力,其含义是车辆制动时的减速度除以重力加速度。制动强度与制动减速度的函数关系如下:
[z=dg] (1)
式中:[z]表示制动强度;[d]为制动减速度;[g]为重力加速度,取10 m/s2。
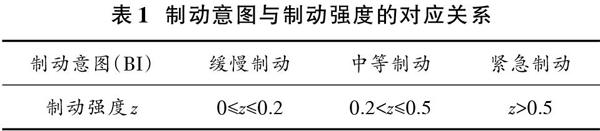
制动意图辨识,就是通过驾驶员对踏板的动作识别来确定制动强度。驾驶员实现制动时,踏板行程和踏板行程变化率可以在第一时间反映出驾驶员的制动意图。踏板位移越大,制动强度越大,制动强度主要由踏板位移决定。踏板行程的变化率体现了制动意图的紧急程度。变化率越大,说明制动的紧急程度越高,相应的制动强度越大;变化率越小,说明制动的紧急程度越低,制动强度就越小。因此,利用踏板位移可以判断出驾驶员的制动强度需求,从而做到实时、准确地识别驾驶员的制动意图,制动意图与制动强度的对应关系如表1所示。
目前关于制动意图辨识的方法主要有:模糊算法、BP神经网络算法、双层隐式马尔科夫模型等,但大部分采用的是模糊推理方法,因为模糊推理方法不需要精确的数学模型,也不需要大量的测试样本,且实现简单。
2 模糊逻辑制动意图辨识方法
2.1 模糊集及论域定义
本文设计的模糊控制器是一个二维结构,把制动踏板行程([F])及踏板行程变化率([Fc])作为输入变量,制动强度([z])作为输出变量,对各参数进行模糊化操作,选取“Mamdani”型作为模糊控制系统的推理方法,用重心法进行反模糊化过程。
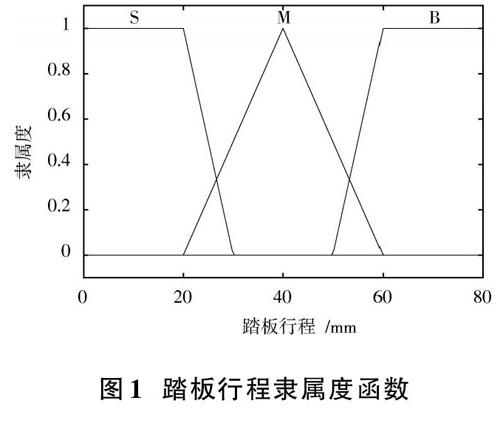
将模糊控制器的输入变量和输出变量的模糊子集均设计为3级,子集元素分别为:小(S)、中(M)、大(B)。参照文献[11]中的制动参数变化范围,确定参数的论域。输入变量踏板行程和踏板行程变化率的论域分别为[0,80],[0,200],输出变量制动强度的论域为[0,1]。踏板行程的隶属度函数如图1所示,踏板行程变化率的隶属度函数如图2所示,制动强度的隶属度函数如图3所示。
2.2 模糊控制规则的确定
驾驶员不同的制动意图对应着不同的制动强度,制动强度是制动效能因素,也就是制动系统的制动能力,根据前面选择的模糊输入变量和输出变量,针对制动强度辨识,制定相应的模糊控制规则表,如表2所示。
2.3 制动意图辨识仿真
2.3.1 制动意图辨识模型
在Matlab/Simulink中建立制动意图辨识模型,如图4所示,输入信号为随时间变化的踏板行程,另一输入信号为踏板行程经过微分之后得到的踏板行程变化率,这两路信号作为模糊控制器的输入信号,模糊控制器的输出信号是制动强度。
2.3.2 制动意图仿真结果及分析
设置仿真时间为10 s。运行仿真,观察仿真结果。
踏板行程随时间变化时制动意图辨识情况如图5所示。在示波器中显示三路信号,从上到下依次为:制动踏板行程信号、踏板行程变化率信号和制动强度信号。
从图5a)和图5b)可以看出,随着踏板行程的增大或减小,踏板行程变化率呈正负交替变化。图5c)是在不同制动意图下,制动强度的变化情况。当踏板行程较小且变化率不大时,制动强度较小,制动意图为缓慢制动;当踏板处于中间附近的位置时,制动强度增大,制动意图为中等强度制动;当踏板接近最大行程时,制动强度最大,此时制动意图为紧急制动。
通过对仿真结果的分析可以看出,利用模糊识别控制方法,在缓慢制动、中等制动、紧急制动三种不同的制动情况下,会由于输入参数的变化程度不同而输出不同大小的制动强度。缓慢制动情况下,踏板变化率较小,制动强度会随着踏板行程的增大而增大;中等制动情况下,踏板行程变化率不大时,制动强度的波动较小;紧急制动情况下,制动强度由踏板行程和行程变化率共同决定,踏板行程和踏板变化率均较大,会在短时间内输出较大的制动强度。总体来说,通过模糊识别方法能够达到预期的制动意图辨识的目的。
3 基于意图辨识的制动控制方法
3.1 制动控制方法
本文采用的是基于意图辨识的制动控制方法,该方法是通过制动踏板行程及行程变化率来辨识驾驶者的制动意图,建立制动意图与制动强度的对应关系,再通过制动强度来控制制动时的占空比,从而动态调节电机制动力矩。
由于不同的制动方式决定了系统的制动特性,为了满足制动系统的快速性且能回收和利用能量,本文采用混合制动方式,并利用不同的制动意图选择最佳的制动方式。紧急制动时,采用反接制动方式;缓慢制动和中等制动时,采用回馈制动与反接制动相结合的方式。该制动控制方法既可以使系统制动性能达到最优,又能实时、準确地达到驾驶员制动意图的目的。
基于意图辨识的制动控制逻辑框图如图6所示。
3.2 制动控制系统建模及仿真分析
在Matlab/Simulink仿真环境下,建立了基于意图辨识的BLDCM制动控制系统的仿真模型,如图7所示[12]。
图7中BLDCM model为方波型BLDCM,其仿真的具体参数为:定子电阻[r=]0.6 Ω,定子自感[L=]0.021 H,转动惯量[J=]9×10-6 kg·m2,极对数[P=8],额定转速[n=]3 000 r/min,电压[VS=]12 V,采样周期[T=]5×10-6 s。
图8是在Matlab/Simulink环境下仿真出的踏板行程曲线,在0~0.3 s过程中,无踏板信号输出;0.4 s后,踏板信号开始随着时间的增大而增大,最后稳定在设定的最大值。可以看出,三条曲线对应不同的制动意图。
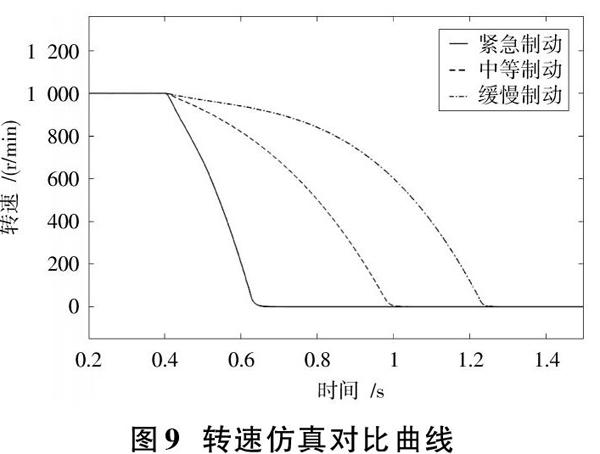
图9为不同制动意图下的BLDCM转速对比曲线。从图9中可以看出,电机经0.3 s达到设定转速1 000 r/min;0.4 s后,由踏板输出制动信号,电机的转速从1 000 r/min开始减小,直至转速为零。不同制动意图下,电机转速减小的快慢各不相同。紧急制动最快,中等制动次之,缓慢制动所用时间最长,证明了基于意图识别的BLDCM制动控制方法的有效性。
由此可见,本文提出的基于意图辨识的BLDCM制动控制驾驶者的制动意图有效地控制了BLDCM制动强度,并且利用回馈制动和反接制动相结合的方式达到快速制动的效果,使BLDCM的制动具有更好的适应性和可控性。
4 结 论
本文针对BLDCM的制动控制方法展开研究,构建了制动踏板意图辨识模型,可实现根据踏板行程及行程变化率辨识驾驶者制动意图,确定制动方式和制动强度,继而快速、合理地控制电机的制动。研究结果表明,本文提出的基于意图辨识的BLDCM制动控制方法提高了系统制动的快速性和可辨识性。同时,该方法实现简单,不仅为今后BLDCM制动及其控制策略的研究提供了新的方法,且在一定程度上缩短了开发周期,具有良好的应用价值。
参考文献
[1] 李发海,王岩.电机及拖动基础[M].北京:清华大学出版社,2012.
[2] 张琛.直流无刷电机原理及应用[M].北京:机械工业出版社,2004.
[3] 渠彦彦,颜钢锋.电动汽车制动与能量回馈技术研究[J].电子技术应用,2013,39(5):61?64.
[4] 宋哲.新型电动车用无刷直流电机回馈制动控制技术[J].电机与控制应用,2015,42(12):79?84.
[5] 胡庆波,郑继文,吕征宇.混合动力中无刷直流电机反接制动PWM调制方式的研究[J].中国电机工程学报,2007,27(30):87?91.
[6] 邢立成,韩丰阳,赵敏.电动车用直流无刷电机电气制动方法研究[J].山西大同大学学报(自然科学版),2012,28(2):67?68.
[7] 王强,王明渝,范杰.电动叉车用无刷直流电机混合制动的研究[J].电力电子技术,2007,41(8):70?72.
[8] 谢文科,严世榕.基于舒适性的电动汽车再生制动[J].系统仿真技术,2018,14(1):14?19.
[9] 赵轩,马建,汪贵平.基于制动驾驶意图辨识的纯电动客车复合制动控制策略[J].交通运输工程学报,2014,14(4):64?75.
[10] 刘剑开,张向文.电动汽车再生制动过程制动踏板位移与制动意图及制动强度之间的关系[J].科学技术与工程,2018,18(12):317?325.
[11] 孙惠萍.线控制动踏板装置研究[D].重庆:重庆大学,2014.
[12] 刘金琨.先进PID控制Matlab仿真[M].4版.北京:电子工业出版社,2016:299?301.
