基于改进型陷波器的伺服系统谐振抑制研究*
2020-07-23龚文全曾岳南黄之锋郭富强
龚文全,曾岳南,黄之锋,郭富强
(广东工业大学 自动化学院,广东 广州 511400)
0 引 言
在交流伺服系统中,伺服电机一般需要通过滚珠丝杠副、联轴器或者齿轮等机械传动机构来驱动负载,这些机械传动环节本身存在着一定的柔性,传动柔性会导致伺服系统发生机械谐振[1]。谐振发生时电机电流发生震荡,电机速度控制失准,不仅会产生噪声,还会对机械传动环节造成破坏,甚至出现断轴等后果[2]。添加滤波器是常采用的抑制方法,但是滤波器会产生相位损失,减小系统的相位裕度,导致系统的动态性能变差,甚至失去稳定[3]。
为了改善使用陷波滤波器带来的相位滞后影响,国内外学者在陷波器结构以及控制策略方面做了大量研究。文献[4]提出了ZPNF(zero-phase notch filter)的设计方案,减小了陷波器带来的相位滞后,提高了工业机械手臂的定位快速性;文献[5]提出了一种新型的ZPNF,对位置控制信号进行了预处理滤波,实验结果表明,机械手臂的末端抖动得到了抑制,同时跟踪性能也得到了提高;文献[6]在ZPNF基础上,提出了ZPETC(zero phase error tracking controller)方案,将二者有效结合,以提高机械手臂的控制性能,最后在仿真中得到了验证;文献[7]针对机械臂的定位和位置跟踪,提出了一种陷波滤波器的小相位误差补偿策略,提高了机械臂的跟踪性能。
但这些设计大多是针对伺服系统位置环路的控制,而且零相位陷波器设计复杂。而对于如何在常规二阶陷波器的基础上,减小陷波器带来的速度环路控制延时,提高速度响应的快速性方面,却很少有详细的研究。
针对伺服系统速度环路中,使用常规二阶陷波滤波器产生的相位损失问题,本文首先建立柔性负载伺服系统谐振模型;然后对常规二阶陷波滤波器的相位特性进行分析,为改善系统的相位稳定裕度,提出一种改进型陷波滤波器,并且在Simulink中建立模型,对所提方法进行仿真分析;最后搭建柔性负载伺服系统实验平台,对比改进型陷波器和常规陷波器的抑制效果。
1 柔性伺服系统建模及谐振分析
在交流伺服系统中,电机与负载之间常采用传动轴、滚珠丝杠副或者联轴器等传动机构进行连接。然而传动机构并不是理想刚性的,电机和负载之间属于柔性连接。
在分析伺服机械谐振问题的时候,常将柔性伺服系统简化为二质量模型来分析。一个典型二质量模型如图1所示。

图1 典型二质量模型
根据以上关系,建立微分方程组:
(1)
式中:Ks—刚度系数;Bs—阻尼系数;Jm—电机转动惯量;JL—负载转动惯量;B1—电机转轴阻尼;B2—负载阻尼;θ1—电机转角;θ2—负载转角;Te—电机电磁转矩;Tw—弹性连接转矩;TL—负载转矩。
若忽略阻尼系数,对系统模型进行化简,对系统微分方程组再进行拉普拉斯变换,可推导出电机转速同电磁转矩之间的传递函数:
(2)
对式(2)进行整理可得:
(3)
将式(3)的共轭零点称为抗谐振频率点ωARF,共轭极点称为自然振动频率点ωNTF。
共扼零点为:
(4)
共轭极点为:
(5)
式(3)的谐振方程中,存在一对共轭极点,并且这对共轭极点与虚轴非常接近,这样会导致系统处于欠阻尼或者临界振荡的状态,一旦有对应频率的激励信号,系统的稳定状态很容易被破坏,这在伺服系统中被称为机械谐振,表现为电机转速出现大幅度震动。
2 陷波滤波器的分析和改进
2.1 陷波器抑制谐振原理
考虑理想陷波滤波器的数学表达式为:
(6)
理想的陷波滤波器能够将输入信号中的指定频率成分完全滤除,其中ω0为陷波滤波器的陷波中心频率。常采用的二阶陷波滤波器具有一定的陷波频带,只在陷波中心频率附近提供较大的幅值衰减,而对陷波频带外的频率信号几乎没有影响,即:
(7)
式中:kdep—深度系数;Q—宽度系数。
柔性伺服系统发生谐振现象,是因为有信号激励了系统中存在的谐振点。因此,可以利用陷波滤波器的频率特性,将陷波滤波器串入速度回路,滤除电流中的谐振频率激励信号,抑制电磁转矩震荡,从而实现电机转速谐振抑制。
对于二质量谐振系统,存在单个的谐振频率,使得该频率点对应的系统响应急剧增大,破坏系统的稳定性。作为滤波器的一种,陷波滤波器可以在谐振频率初进行精准的滤波,衰减谐振信号,因此,加入适当的陷波滤波器之后,谐振点峰值会被抑制。
2.2 陷波器的相位影响
陷波器实现了系统谐振峰值的抑制,但是考虑到滤波器本身的相位延迟,也必然会对系统产生一定的相位滞后,使系统的响应变慢,相位稳定裕度减小。
相位稳定裕度表征一个系统的稳定性能,通常用来判断系统是否稳定的依据为:
PM=180°+φ(ω)
(8)
根据自动控制原理可知,对于一个稳定系统而言,其相位裕度至少应保持PM>45°。
对于式(7),令s=jω,则有:
(9)
其相角特性表达式为:
(10)
所以,陷波滤波器所产生的相角损失为:
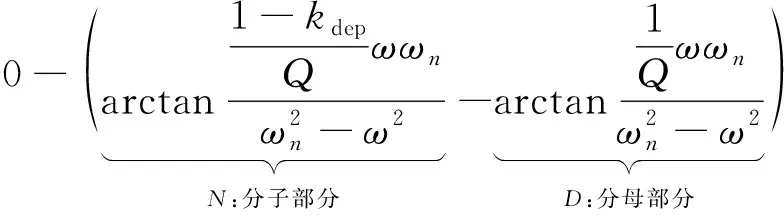
(11)
由式(11)可知:若要减小相角损失Δφ(jω),可以通过减小φ(0)或者增大φ(jω)实现;但对于陷波滤波器来说,改变φ(0)很难实现,所以只能考虑增大φ(jω)。φ(jω)由两部分组成,分别是分子部分和分母部分,为了方便表示,以下表述中,分别以分子N和分母D来代替。
2.3 改进型陷波滤波器
引入修正因子ε,当ε=1时,即为原陷波滤波器形式,相位特性无改变。当ε>1时,考虑反正切函数特性,由于ε>1且位于分母,此时分子N部分保持不变,分母D部分减小,φ(jω)总体增大,在φ(0)保持不变的情况下,相角损失Δφ(jω)整体变小。
根据上述分析,式(7)可改写为:
(12)
引入修正因子后,陷波器结构发生改变,可能引起陷波滤波器的陷波深度变化,影响陷波效果。
式(12)中幅值为:
(13)
当ω=ωn时,此时对应最大衰减倍数为:
(14)
则可以得到中心陷波深度为:
D=20lg|H(jω)|
(15)
当ε=1时,即为常规陷波器,其最大衰减倍数为:
|H(jω)|=1-kdep
(16)
取ε=1.5,改进前后陷波器幅频特性如图2所示。

图2 改进前后陷波器幅频特性
从图2中可以看出,常规陷波器的陷波深度约为-40 dB,改进后的陷波器深度为-37.8 dB,约减小2 dB;但是在陷波中心频率处,常规陷波器的Δφ(jω)=-75.2°,而改进后陷波器为Δφ(jω)=-43.5°,相角损失明显减小。
所以,改进型陷波器以较小的陷波深度损失,获得了较大的相位补偿,在不影响谐振抑制效果的情况下,系统相位裕度增加。
将两种陷波器加入谐振系统之后,谐振系统及抑制效果如图3所示。
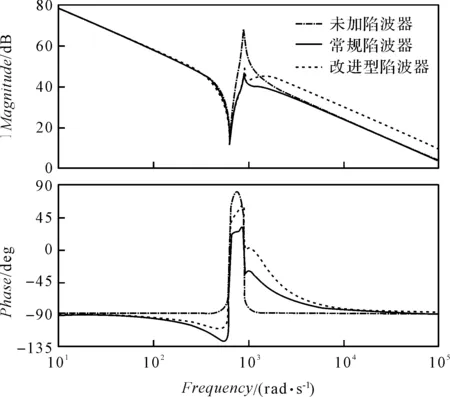
图3 谐振系统及抑制效果
系统开环时,在谐振频率附近使用常规陷波器时,系统相位约为-130°,使用改进型陷波器系统相位约为-110°,相位滞后更小。另根据式(7)的系统稳定性判据可知,改进型陷波器系统的相位裕度约为70°左右,此时开环系统处于稳定状态。
在系统闭环状态,速度环带宽ωc主要受到抗谐振频率点ωANF的影响,且ωc<ωARF[8],闭环系统幅频特性如图4所示。
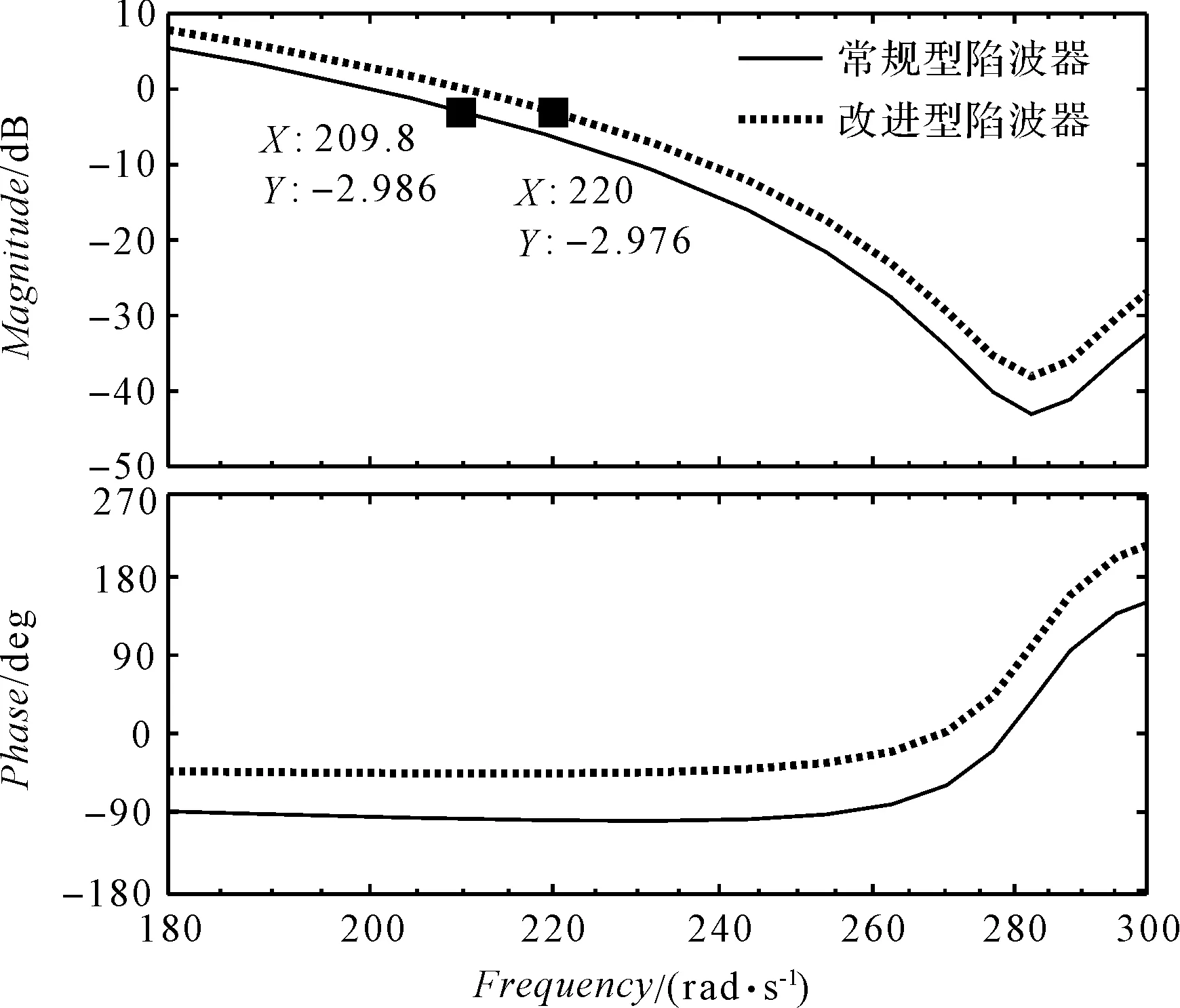
图4 闭环系统幅频特性
图4中,系统的ωARF=285 rad/s,使用常规型陷波器时,速度环带宽ωc-notch=209 rad/s,使用改进型陷波器时,速度环带宽ωc-im-notch=220 rad/s。可以看出,相比常规型陷波器,使用改进型陷波器后,系统带宽增大。
在改进型陷波滤波器的高频部分,即频率大于陷波中心频率处,改进型陷波器的幅频特性发生了变化,理想状态下应保持无增益的状态受到影响,此处的增益被抬高。但是对于中高频段的伺服系统机械谐振来说,谐振频率通常处于接近或者超过速度环截止频率的范围。
在图4中,系统闭环的速度环截止频率为ωc-im-notch=220 rad/s,经过速度环截止频率的限制之后,高频信号等于受到了低通滤波器滤波效果,在高峰值的谐振频率被抑制的前提下,其余的高频信号被低通滤波效果大幅度衰减,抵消了陷波器所产生的增益抬高。所以,在陷波中心频率之后,改进型陷波器幅值增益被抬高的特性变化,并不会导致系统出现不稳定状态。
3 仿真验证和分析
为了验证改进型陷波器的有效性,笔者在Simulink中搭建柔性永磁同步电机双闭环调速系统仿真模型,仿真参数如表1所示。
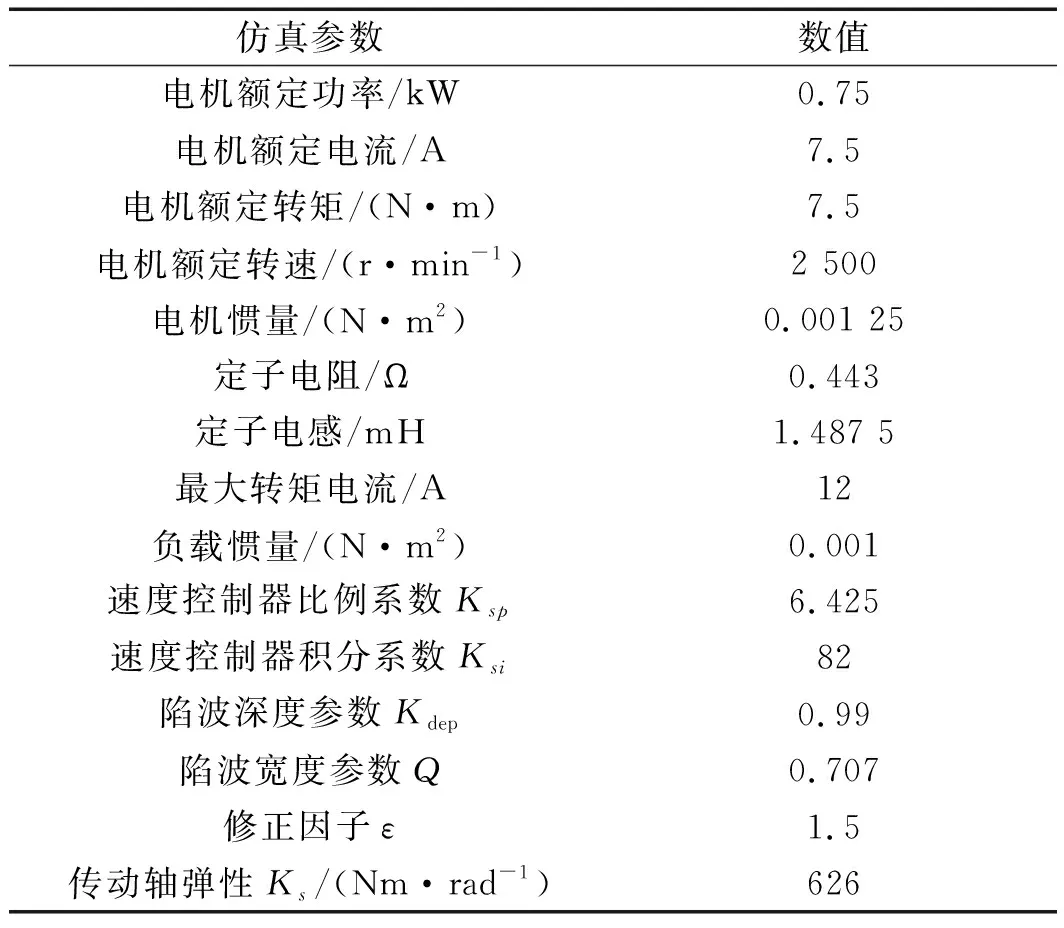
表1 仿真参数
速度给定为130 r/min,使伺服系统发生机械谐振,笔者使用PowerGrid中的FFT分析工具,得到谐振频率,并以此作为陷波滤波器的中心频率。
对比无陷波处理的电机转速和使用常规陷波滤波器的电机转速,常规陷波器谐振抑制如图5所示。

图5 常规陷波器谐振抑制
从图5可以看出,当伺服系统发生机械谐振时,如果仅使用PI控制器,电机转速出现持续震荡,并且无法收敛;加入常规陷波滤波器之后,电机转速基本呈现平稳状态,最终稳定在速度给定值,震荡得到抑制。
但是通过对比还可以发现,虽然使用陷波滤波器实现了电机转速振动抑制,然而此时系统的动态响应存在着明显的滞后现象。
对比使用常规陷波滤波器的电机转速响应和使用改进型陷波滤波器的电机转速响应,改进型陷波器抑制效果如图6所示。

图6 改进型陷波器抑制效果
从图6可以看出,两种陷波器均能实现机械谐振抑制,电机转速都能够平稳收敛。但是与常规陷波器相比,经过改进之后,系统的动态性能得到了改善,响应速度明显提高,而且稳定速度明显加快。
两种陷波策略动态性能指标如表2所示。

表2 两种陷波策略动态性能指标
通过表2可以看出,由于改进型陷波滤波器的相位损失更小,对系统产生的滞后也更小,电机转速上升时间加快,峰值变小,超调量减小,调节时间更短,速度稳定更快。由此可见,与常规陷波的抑制效果相比,使用改进型陷波器后,系统的动态性能得到了改善。
4 实验及分析
为验证所述方法的可行性和有效性,笔者搭建永磁同步电机柔性负载伺服系统。
整个系统由数字式交流伺服驱动单元、表贴式永磁同步电机以及柔性负载等3部分组成,实验平台如图7所示。

图7 实验平台
笔者通过NI公司的模块化平台以及LabView工具,显示电机速度,并且根据电机反馈速度信息,离线获取速度振动的FFT频率检测结果。
实验控制参数如表3所示。
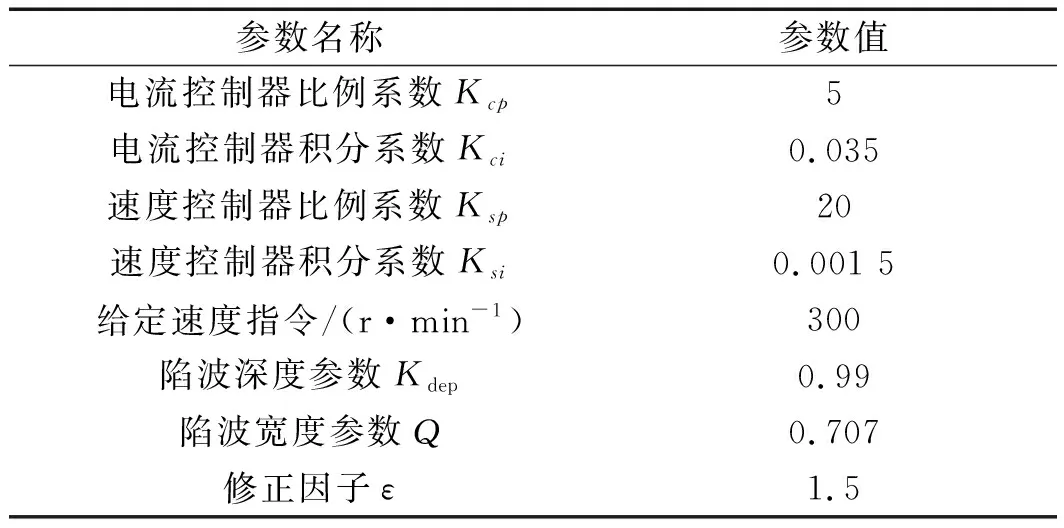
表3 实验控制参数
4.1 稳态抑制效果验证
由于修正因子会导致陷波深度减小,首先验证在系统发生机械谐振时,改进型陷波滤波器能否实现谐振抑制。
在高控制增益情况下,电机转速发生剧烈震荡,笔者于中途加入改进型陷波滤波器,电机转速抑制前后对比如图8所示。

图8 电机转速抑制前后对比
抑制前电机震荡幅值接近70 r/min,添加陷波滤波器之后,电机转速震荡被迅速抑制,最终保持在4 r/min之内,衰减比例达到94.3%,基本实现平稳输出,表明改进型陷波器可以实现谐振抑制。
4.2 动态性能对比
保持实验参数不变,令系统产生谐振,笔者分别在零时刻加入常规陷波器和改进型陷波器,电机转速动态性能对比如图9所示。

图9 电机转速动态性能对比
图9中,由于改进型陷波器带来的相位损失更小,造成的相位裕度损失比常规陷波器要更小,系统的稳定性更好,两种陷波器都可以避免系统发生谐振,使速度波动保持在4 r/min之内。但常规陷波器系统在启动阶段波动幅度较大,而改进型陷波器系统则基本平稳上升。
另外,常规陷波器系统的响应速度较慢,在输入指令为300 r/min时,速度响应超调接近12 r/min,进入最终稳定需要一段时间。但是改进型陷波器响应速度更快,几乎无超调,到达输入指令后,迅速进入稳定状态,整体动态性能优于常规陷波器系统。
5 结束语
针对弹性传动环节导致的伺服系统出现机械谐振的问题,本文在完成谐振机理分析的基础上,提出了一种使用改进型陷波滤波器进行机械谐振抑制的方法,以减小陷波器引入的相位滞后,并实现谐振抑制。
具体过程如下:
(1)对常规型陷波滤波器相位特性进行了分析,并且阐述了引入陷波滤波器之后,对系统相位裕度造成的影响;
(2)提出了改进型陷波滤波器,通过调整校正因子,可以实现陷波器的相位优化,并且保证陷波器的陷波效果;
(3)仿真结果表明:和常规陷波滤波器相比,改进型陷波滤波器的相角损失更小,系统的闭环带宽得到提升,系统转速输出的动态性能更好。实验结果表明:电机转速的快速性得到提高,超调量减小。