山区无人机巡线避障技术研究与应用
2020-07-23周建,陈裕
周 建,陈 裕
(1.安康供电分公司,陕西安康 725000;2.紫阳供电分公司,陕西紫阳 725300)
1 无人机巡线技术应用的优势
随着消费级无人机技术的逐步发展和完善,使用无人机电力巡线和人力巡线的结合已经成为电力行业的主要趋势。无人机电力巡线技术应用得以如此快速的发展,有以下原因。
(1)安全性高。无人机加入电力巡线工作,降低了巡线工人工作难度,提高了安全性能。
不难看出, 有限差分近似式(3)引入了两类数值误差. 数值色散修正的是波的相速度, 即c*(ξ)=; 数值耗散修正的是波的振幅, 记作e-λt, 衰减率对应于一种特征衰减时间尺度的倒数, 该时间尺度仅当时才有意义.
(2)效率高。在电力巡线工作中,只要规划好飞行路线,电力巡线的效率将大大提高。
(3)分析准确度高。目前最先进的无人机定位可以精确到厘米,这样的精度对故障检测、工程测绘来说至关重要。
很快,救护车到了,哎哟一声那人捂着脑袋被抬上了救护车。警车又到了,一堆灯光又闪烁开来,左小龙恍惚间好像又回到了和泥巴在旅店的二楼看楼下的情景。警察查了半天,现场没查明白那人是怎么头破血流的,左小龙也没犯什么法,只不过当众爆缸而已,属于产品使用不当。警察再次驱散了人群,人们欢呼着,睡觉去喽。
(4)降低巡线难度。无人机在江河湖泊、深山高原等巡线施工作业难度大、危险性高的地方,都能够轻松抵达并完成,不会遗漏任何一处。
此供电分公司位于山区,地形复杂,自然环境恶劣,有些地方必须通过无人机才能巡视。本应用案例主要以巡检无人机通过环境感知为主要目的,使得无人机探索出一套适应山区的电力巡检的技术方案,具体如下。
(2)无人机的通讯链路采用普通民用的2.4G和5.8G传输,这种频段的优点是传输效率高,缺点是容易受遮挡,一旦受遮挡后会造成通讯链路中断,导致无人机失控。在实际应用中该地区山体众多,电力线路大多沿山跨山分部,电磁干扰和信号受山体遮挡导致的失控是巡检过程中构成无人机事故的主要原因(图5)。
2 无人机巡线避障技术的研究与应用
图2为不同机型提供不同方向的避障示意图,以适用不同环境下应用。
本文针对无人机巡线技术,应用案例以某供电公司为例,创新性地提出山区无人机电力线路巡检的应用中,必须融入环境感知系统和自主巡航避障系统,由二者协作无人机才可实现自主避障。
钟自然强调,新时代的海岸带地质调查工作,要深入贯彻党中央国务院的有关重要精神,落实自然资源部党组的决策部署,以地球系统科学理论为指导,紧扣海岸带经济社会发展和生态文明建设重大需求,聚焦海岸带重大资源、生态、环境问题,以及制约这些问题解决的重大科技问题,构建起跨地区、跨单位、跨专业协同攻关,多方协调联动,资料数据共享共用的新机制,分层次有序推进海岸带综合地质调查,着力加大海岸带地质科技创新和信息化建设力度,加快完善海岸带地质调查保障体系,为海岸带综合管理提供地球系统科学解决方案,开创海岸带地质调查工作的新局面。
(5)成本低。1台电力巡检无人机每天能完成上百公里的电力线路巡检任务,相当于上百个电力巡检工人的工作量,大大降低了人工成本。
2.1 电力巡线对无人机避障能力的要求
如图1所示,无人机探测到前方15m,后方8m有障碍物。随着障碍物与无人机的距离缩短,雷达波颜色逐渐由绿色变为黄色,再变为红色,遥控器报警声也会逐渐变急促,最终在距离障碍物前方2m处悬停,从而起到保护无人机的作用。当开启绕障功能后,无人机会主动从障碍物上方或者左右越过。
(1)环境感知系统又称为避障系统,避障分为绕障和停障,在巡检过程中环境感知系统对周围环境进行建模。当绕障功能开启时,无人机遇到前方障碍物就会重新规划飞行路径,在飞手不用操作的情况下可以从障碍物的上方或者左右俩方绕过,起到保护无人机的作用。当没有开启绕障功能时,无人机无法绕过障碍物,避障飞行系统会在障碍物前方发出报警声给飞手,随着距离的接近报警声变急促最终悬停,即使飞手推动操作杆前进,无人机也会保持悬停并发出报警声,从而提醒飞手注意安全。

图1 方案实测示意图
无人机在电力系统中承担的工作通常是电力线路巡检。在无人机巡检中如果不能自主避障,很容易发生撞上电力设施、撞击山体或建筑物、返航失控等事件;同时无人机受电磁环境干扰时也容易出现失控飞丢、返航自主寻路失败等状况。因此在山区无人机巡线应用中,无人机自主避障技术的研究与应用至关重要。综合目前无人机避障技术的应用,在山区无人机巡线避障技术的研究和应用中,最核心的环节是感知障碍,无人机只有准确感知障碍才有可能实现完美避障。
患者既往先后行两次剖宫产史,于第二次剖宫产术术中发现右侧卵巢包块,病检提示为恶性肿瘤,于剖腹产术后4天行右侧卵巢肿瘤根治术;1个月前因左侧股骨颈骨折,于我院行股骨颈骨折固定术;无输血及献血史,无高血压、糖尿病、慢性支气管炎等慢性疾病;预防接种史具体不详。曾有青霉素、头孢类药物过敏史。

图2 不同机型提供不同方向的避障示意图
(1)由于地球磁场较弱,无人机通过磁罗盘提供指向时往往会因为电网的电磁干扰造成磁罗盘错误,给无人机提供错误的方向信息,使运算逻辑混乱,给无人机发出错误的指令造成失控。巡检的主体铁塔具有磁性,带电线路有强磁辐射,都会干扰无人机的指南针,所以巡检中一但靠近巡检主体,指南针就会受到干扰,严重者甚至会造成事故,如图4所示。
图3 FPV相机始终提供机头方向视角示意图
2.2 无人机在恶劣环境下巡线存在的问题
(2)FPV相机协同避障系统实现绕障飞行,如图3所示。实际飞行过程中,无人机的飞行的方向和云台朝向有时不一致,因此飞手无法判断前方障碍物的情况,简单地依靠避障系统提供安全保障已经不能满足现实中的需求。为了适应山区无人机飞行安全,巡线无人机升级配置FPV相机实时提供机头前方画面,配合避障系统,让飞手再巡检的过程中,不必修正云台朝向观察机头前方,既保障了无人机的安全又提高了巡检效率。当云台在没有朝向机头方向的时候,即便遇到障碍物无人机也会在飞行方向上最大可能的继续飞行绕过障碍物,而非只通过刹车悬停方式保障了安全却终止任务。

图4 磁场收到干扰后,无人机不能正常起飞
综上所述,将无人机应用到电力巡线工作中不仅能提高电力维护和检修的效率,使很多巡检工作能在完全带电的环境下迅速完成,还确保了用电安全。另外,采用无人机进行常规输电线路巡查,可降低工人工作强度,提高巡线作业人员的安全性,降低了成本。无人机巡线速度快、响应迅速,能及时发现缺陷,及时提供信息,提高了供电可靠性,避免了因事故停电造成的其他损失。
2.3 解决措施。
(1)无人机使用30倍光学变焦+6倍数码变焦且带三轴增稳技术使抖动控制在0.01°以内的云台相机,如图6所示。在不用靠近拍摄体的情况下完成拍摄任务,不仅灵活快速的获取信息还能有效地保障人员和设备的安全。

图5 无人机通讯链路受建筑物或山体遮挡后失控

图6 30倍光学变焦后,可远离电磁干扰源进行拍摄
(2)传统的失控行为有悬停、降落、返航。在以往的失控返航行为中,无人机会自动直线返回到起飞点。在山区巡检中,地理环境高低起伏,直接返航会导致无人机因返航高度不足直接撞上山体或障碍物。因此,新型巡线无人机在返航中,当通讯链路中断后,无人机并不会直接返回起飞点,而是在之前记录的飞行路径和全局地图中拟合一条安全的返航路线。由于这条路径是无人机飞行过的,这种场景下的返航就会沿着过去的路径返回,直至恢复链路通讯。在操作人员选择一键返航后,无人机会直接直线返航,在返回路径上如有障碍物,无人机会在接近障碍物后选择上升避开障碍物,再前进继续飞往返航点。由图7、图8可知,对于山区、峡谷线路巡视的场景,当无人机绕到障碍物背后的时候图传信号有可能会因为遮挡的原因中断,此时无人机会自动从飞入的路线中规划路出,保证与操作者之前的信号连接能够在最短时间内恢复。
按照上面的实验结论,猫咪们是“男左女右”的坚定执行者,宠物狗们则没有这么统一。澳大利亚悉尼大学兽医学院的保罗·麦克里维博士领导的研究小组在对270只种类不同的狗进行长期观测后发现,15%的狗是右撇子,15%的狗则是“左撇子”,剩下70%的狗没有明显的使用偏好。麦克里维认为,左撇子或右撇子的狗更容易被训练成为适合特定工作的狗,比如导盲犬或警犬。那些对左爪或右爪缺乏使用偏好的狗更容易对声音产生恐惧。
随着我国土地流转的加剧和农业现代化、规模化的发展,传统农资行业销售渠道正面临着翻天覆地的改变,厂家渠道贴地下沉,市场竞争不断加剧,新型农业经营主体和新型服务平台的层出不穷,农资企业在业务拓展上受到越来越多的阻力和挑战。如何在新的农业发展形势下拥抱变化、盘活市场成为肥料生产企业亟待破解的难题。
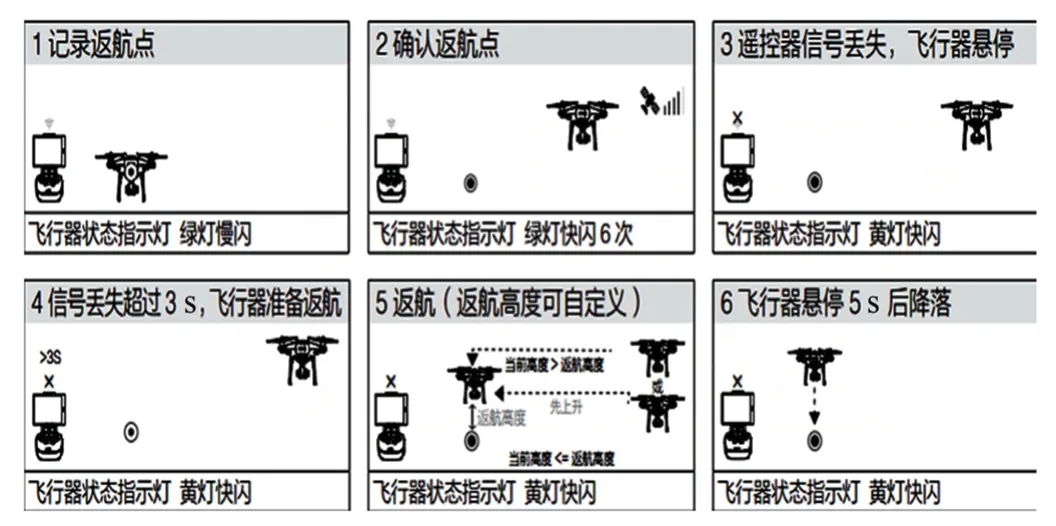
图7 平原地区的失控返航示意图
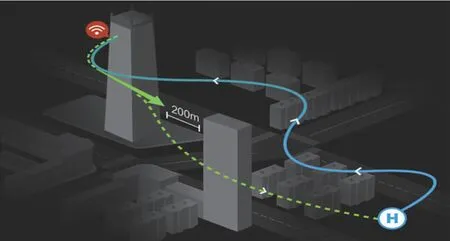
图8 山区地区的全新智能返航示意图
(3)精准降落是针对无人机返航降落过程中消除外部因素干扰精准降落到起飞点。传统的降落采用GPS定位降落,其缺点是误差大,造成自动降落的地方距离起飞点比较大,容易因土地不平整造成侧翻或挂树挂电线。最新的精准降落是在无人机起飞时,通过下视传感模块记录起飞地的图像信息,返航降落时通过与起飞时的采集的图像信息进行对比,引导无人机降落到起飞点,进而保证无人机精准降落,具体如图9所示。

图9 上升5m采集地理信息,实现精准降落
3 结束语
无人机巡线技术的应用具有十分广阔的前景,单一避障技术已无法满足目前复杂的需求,多种避障技术相结合的新型避障手段是未来的发展方向。
