基于SRM分割和分层线段特征的船舶目标检测方法
2020-07-21陈牮华陈连凯
齐 亮,陈牮华,王 东,陈连凯,王 伟,董 梁
(1.江苏科技大学 电子信息学院,镇江 212000) (2.江苏科技大学 教务处,镇江 212000)
近年来,随着我国高分辨率遥感卫星的上天,关系到国家的安全和经济的发展,船舶目标检测的研究在海洋遥感领域得到高度重视.对于海上交通安全具有重要意义,包括监控特定海域与特定港口.船舶检测可以用于遇难船舶的救援工作,打击非法捕鱼船舶、非法倾倒垃圾船舶、打击走私船舶以及打击海盗等行为,从而大大提高近海地区的海运管理能力和调度能力.保护海上资源开发、探测未深海资源,以及海上防灾救灾,高分辨率遥感船舶检测己经成为海洋监视监测必不可少的手段,而其不仅仅是信息量的提升,而且由于图像细节的丰富、纹理的复杂,分析图像变得更加困难,因此对高分辨率遥感图像下船舶目标的检测更为重要[1-2].
目前国内外船舶检测研究主要两大类[3]:一是基于边缘提取的方法,根据船舶平行长直线特性,从图像提取边缘,然后通过检测方法进行直线检测,此方法速度快、复杂度低,但由于背景的干扰许多岛礁之类的非目标区域也会被检测出来;二是基于区域分割的方法,根据船舶与周围纹理的差异性,通过图像分割的方法达到提取备选区域的目的,在备选区域内再识别,此方法速度慢、复杂度高,识别效果依赖于区域分割阈值的选取以及用于识别的特征的鲁棒性好坏.而在船舶目标检测问题研究中,较大的目标适合采取基于遥感图像的目标检测方法,对弱小目标的检测可以忽略.随着遥感卫星分辩率的不断提高,图像包含的信息量越来越多,图像的数据量也越来越大,高分辨遥感图像中海上船舶目标具有细节明显的特点,为了快速检测船舶目标,文中提出一种基于SRM分割和分层线段特征提取的船舶目标检测方法.
1 图像预处理及图像分割
1.1 遥感图像海面区域预处理
高分辨率遥感图像中,海洋背景占据了图像的绝大部分面积,海洋整体呈现亮度较低、变化较为平缓的特点.而海上船舶目标亮度较高,细节比较清晰,目标轮廓边缘较为明显.对图像进行预处理的主要目的是抑制遥感图像中的噪声干扰.遥感图像中的包含的噪声主要有高斯噪声和椒盐噪声[4].均值滤波器、中值滤波器、维纳滤波器等都是较为常用的图像去噪滤波器.其中,中值滤波器是一种非线性平滑滤波器,其主要功能是让与周围像素灰度值的差比较大的像素改取与周围像素值接近的值,由于中值滤波不是间单的取均值,所以产生的模糊相对于其他滤波器结果要少,因此效果也是最好.
为了将感兴趣或者重要的灰度区域拉伸,使该区域的信息量增大,抑制不感兴趣或者不重要的区域.因此文中采用一种基于分段线性拉伸的图像增强[5].如图1,分段线性增强是将图像灰度f(x,y)的区间分割为若干区间,然后对每个区间进行线性拉伸.常用的是分三段线性变换,对于遥感数据把原图像灰度的范围设为(MINf,MAXf),则把图像分割为3段(MINf,a)、(a,b)、(b,MAXf),分别拉伸到对应3个区间(0,c)、(c,d)、(d,255),通过调节a,b,c,d对任意区间的分线段斜率进行调节.线性变换公式:
g(x,y)=
(1)

图1 分段线性增强Fig.1 Piecewise linear enhancement
1.2 SRM分割算法
对于预处理后的图像进行快速提取,利用canny算子,快速提取边缘.针对有边缘的地方,进行船舶提取,检测到边缘,然后在边缘的地方,选定区域,进行SRM分割和LSD直线提取.
经典区域融合(statistical region merging,SRM)算法[6]是2004年由Nock和Nielsen提出的一种图像统计模型,算法主要根据图像区域的同质性质在概率空间中寻找最优合并区域,能够感知并快速捕获图像的主要结构,具有较强的抗噪性能,针对不同的内容复杂度可以实现多尺度分割,是一种高效的图像分割算法.经典的SRM算法主要包含两部分核心内容:① 合并顺序,即图像中的像素对(或区域对)按照什么样的顺序来进行合并;② 合并准则,满足什么样的条件图像像素对(或区域对)才能合并.
SRM算法主要针对RGB三通道彩色图像,假设图像I含有多个像素,每个像素包含(R, G, B)3个颜色通道,每个通道取值范围为{1, 2,…,g},每个颜色通道采用Q个独立的随机变量表示,取值范围为[0,g/Q].图像I是真实场景I*的一个观测,其中g一般取256;参数Q为真实场景的复杂程度,即有多少个随机变量.
因此该算法需要满足一定的一致性假设条件:
(1) 在任意图像统计区域内部和R, G, B任意三通道中,统计像素在该颜色通道应该有相同的均值;
(2) 相邻的统计区域的均值在R, G, B 3个通道中至少有一个不同.
根据此假设条件,推导出该SRM算法合并准则:
(2)

(3)
式中:pk和pk′为相邻的像素值.
2 基于分层线段特征提取的船舶目标检测方法
2.1 船舶目标检测
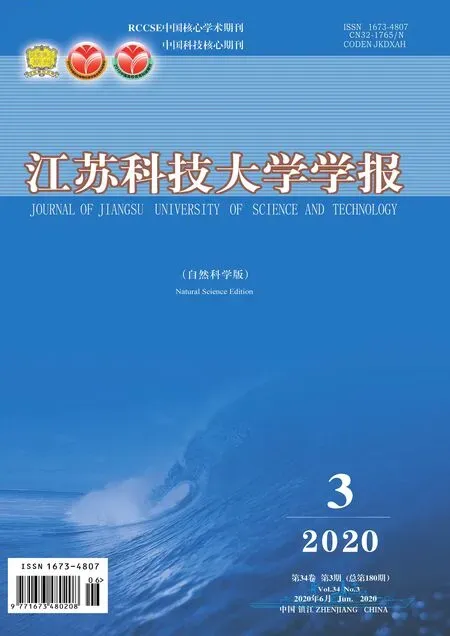
通过对SRM分割的二值图像进行线段检测、边缘检测、网络提取从而确定检测形状是否为船舶或岛屿.具体流程如图2.
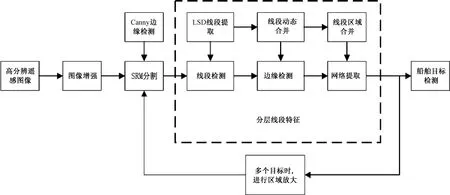
图2 船舶目标具体检测流程Fig.2 Flow chart of specific inspection of ship targets
2.2 分层线段特征提取步骤方法
根据船舶平行长直线特性,提出了一种新的综合三层次结构的船舶目标边缘特征提取:线段检测、边缘检测、海上目标网络提取.
(1) 基于LSD的线段检测
船舶目标被描述为长的、平滑的、连续的物体,因此,线段在船舶目标提取中起着重要作用,利用矢量化技术将栅格数据转换为线段的矢量数据.
线段检测(line segment detector,LSD)算法[7]是利用梯度信息和行列线来进行直线检测的.其中梯度计算是利用每像素点的右边下方的4个像素进行计算LSD梯度:
(4)
规范后的梯度:
(5)
梯度方向的计算:
(6)
式中:x和y为像素点的横坐标和纵坐标.
(2) 边缘检测
与经典的基于区域的检测器相比,文中方法包括两个步骤:首先在目标边缘线段区域中定位线段,然后使用动态搜索来检查目标线段是否合理[8-9].
根据沿目标边缘方向的角度将线段定位到目标边缘线段区域,然后该目标边缘线段区域以该线段为开始,并且以该线段的角度设置为目标边缘区域的角度,如图3(a)为目标边缘线段区域的长度、宽度以及角度,图3(b)为目标边缘线段区域动态搜索.
通过线段的角度与目标边缘线段区域的角度比较,如果该线段的角度与目标边缘线段区域的角度的差值的绝对值小于设定的值,则可以保留该线段并且成为同一目标边缘线段区域内的线段;如果该线段的角度与目标边缘线段区域的角度的差值的绝对值大于设定的值,则动态搜索线段会自动停止,并且会以该线段为另一个目标边缘线段区域内的开始线段.
一般通过搜索计算邻近线段与目标边缘线段区域的角度差为动态搜索检测标准,当目标边缘线段区域方向达到某一确定值时也会自动更新新的目标边缘线段区域,每次循环目标边缘线段区域将根据k及其长度L更新.
具体的算法流程:给定线段,通过该算法计算线段角度作为目标边缘线段区域角度,并且相邻线段按角度差值快速动态线段合并.然后通过改变目标边缘线段长度、线段间距离和密度,并通过改变k值来搜索下一个区域线段,计算该线段角度.当条件不满足时,以该线段为下一个过程区域的开始线段继续搜索.最后,为了构建目标边缘线段区域列表,将线段区域按降序密度大致排序.
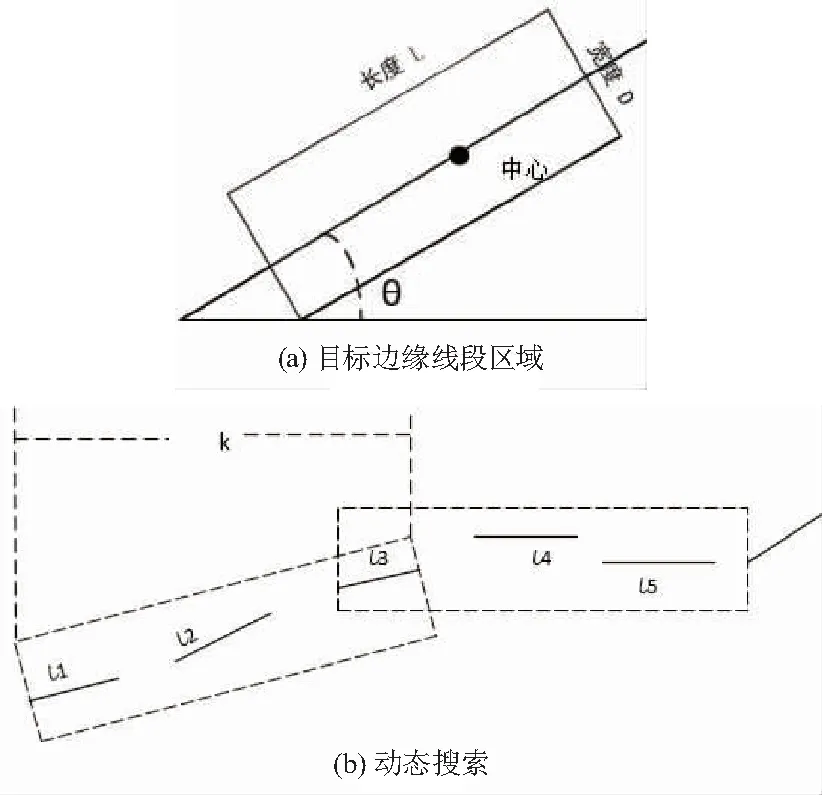
图3 目标边缘线段区域与动态搜索Fig.3 Target edge segment area and dynamic search
(3) 海上目标网络提取
海上目标网络提取包括两个主要步骤:首先基于阈值(目标边缘线段区域到以目标中心平行线的距离)将目标边缘线段区域合并到以目标中心平行线上;然后基于船舶是长、平滑的物体,很容易根据形状检测确定是否为船舶或岛屿.
2.3 船舶区域几何特征及识别
通常情况下,船舶与岛屿的外形很容易识别.如:区域特征包括长宽比(外接正方形),区域的最长对角线,周长和面积比;线段特征包括线段个数,线段角度.如图4,由于区域特征的长宽以及对角线长度很容易辨别图4(a)为船舶.
图4 几何特征示意图Fig.4 Schematic diagram of geometric features
在高分辨率卫星图像的候选目标区域内对预检测结果进行舰船目标的最终判别,利用最小外接矩形提取目标的形状特征[10-11]作为判别依据:
(1) 舰船长度a,amin≤a≤amax;
根据舰船外形的规定参数、先验知识设定具体的门限值.同时满足上述3个条件时,判断为舰船目标,否则剔除.
2.4 动态搜索中的检测标准
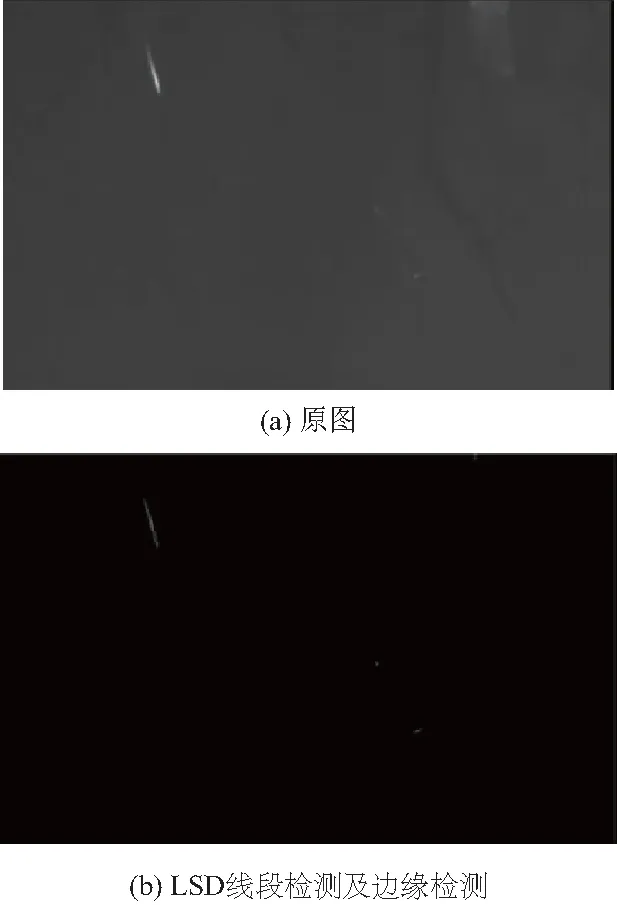
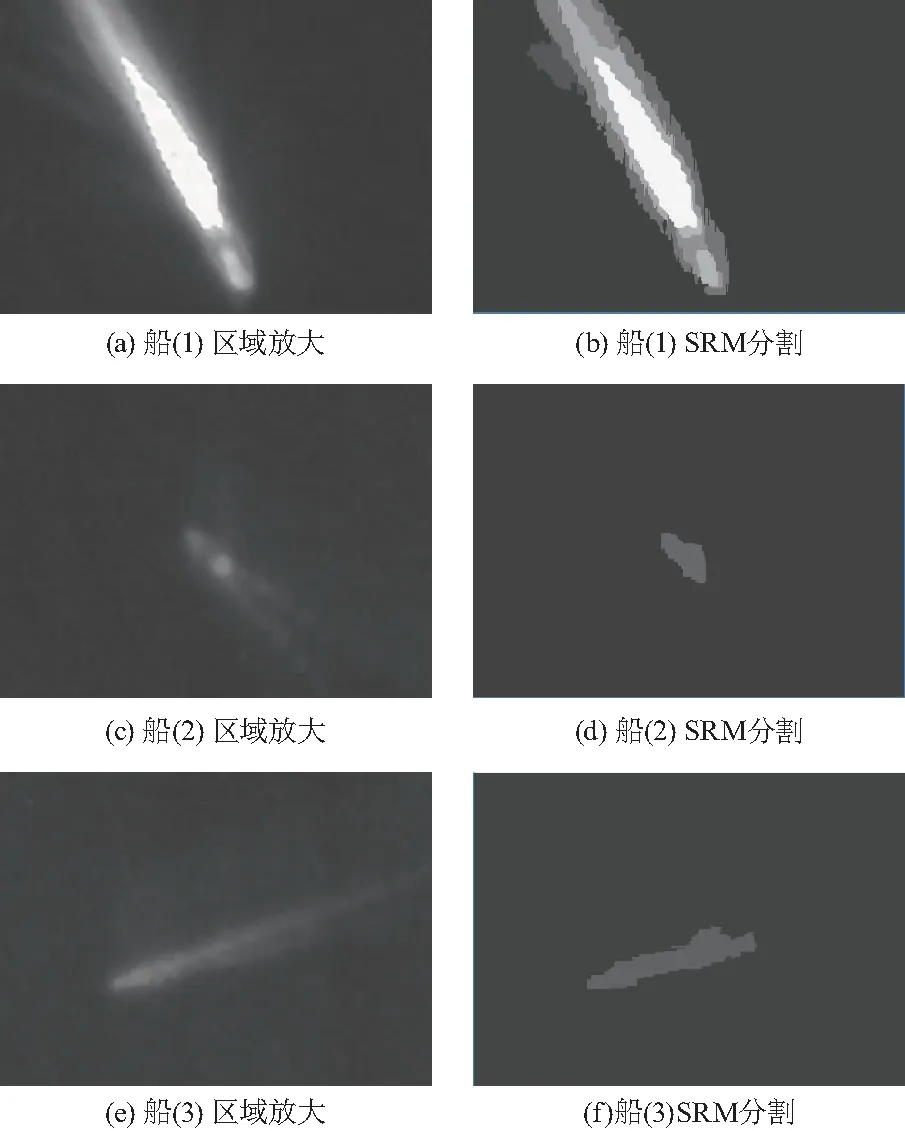
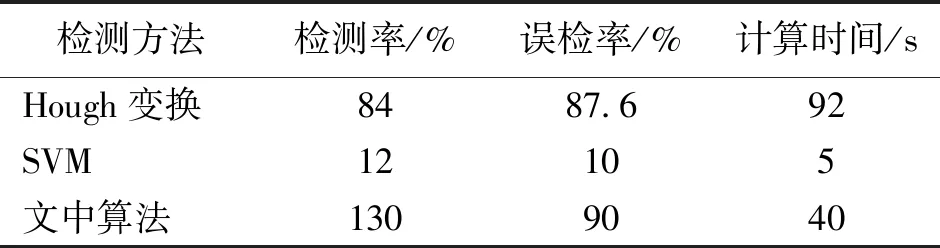
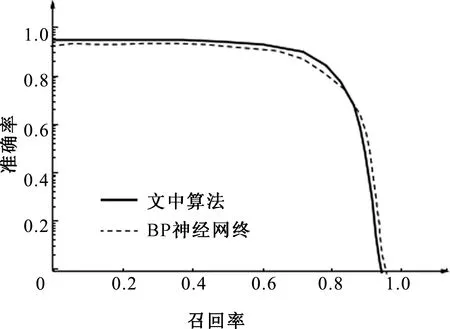
准则1:初始目标边缘线段区域的特征是由其宽度和角度决定的矩形,在动态搜索的迭代过程中,形成新的目标边缘线段区域,其宽度D和长度L和角度θ,当目标边缘线段区域宽度D (7) 式中:θli为目标边缘线段区域里的各个线段角度;θregion′为目标边缘线段区域的角度;m为常数. 标准2:由于线段不受阴影和遮挡以及一些噪声的影响.基于分层线段的间隔距离,目标边缘线段的连接性满足阈值标准,即g 标准3:遥感图像中船舶目标长,几何平滑,原则上是连续的物体,所以它的长度应该达到一定的阈值.在海上目标边缘中提取许多线段,将目标边缘线段区域的最大长度作为满足最小船舶目标的长度,即L>a. (8) 式中:a为最小船舶目标的长度;L为目标边缘线段区域的长度;m为常数. 准则4:在目标边缘提取了许多线段,线段越多,目标越有可能是船舶(船舶较岛屿小,容易形成密集的边缘),因此,定义线段的密度来识别船舶目标.密度较大的线段作为船舶目标保留. (9) 式中:S为目标边缘线段区域内的线段密度;m为常数. 图5 动态搜索准则示意Fig.5 Schematic diagram of dynamic search criteria 图6(a),(b)分别是遥感原图与基于分层线段特征提取的船舶目标边缘检测图. 图6 船舶目标原图与边缘检测图Fig.6 Original image and edge detectionimageof ship target 由图6(b)可知有多目标的存在,为了更好地识别是否为船舶,对多目标区域进行了局部放大以及SRM图像分割如图. 如图7(a)(c)(e)为目标区域放大图,(b)(d)(f)为SRM图像分割图像.为了验证该算法特征提取时的精度,以长度与宽度为几何特征检标准,选取图6(a)中3个船舶切片,针对常规最小外切矩形(minimum bounding rectangle,MBR)提取算法与文中特征提取算法进行实验对比,表1为基于常规MBR提取算法结果,表2为基于文中算法提取结果,角度阈值设为12°[12]. 图7 局部放大以及SRM图像分割Fig.7 Imagesof local magnification andSRM image segmentation 表1 基于常规MBR提取算法结果(单位:像素数)Table 1 Results based on conventional MBRextraction algorithm(unit: number of pixels) 表2 基于文中算法提取算法结果(单位:像素数)Table 2 Extraction algorithm results based on thealgorithm (unit: number of pixels) 由表1、2的结果可以看出,常规方法提取特征的平均长度误差为5.7个像素、宽度平均误差为2.7像素;而文中方法的平均长度误差为2.7个像素、平均宽度误差为1.7个像素,因此文中几何特征提取准确率远远高于常规方法.根据船舶长宽比特征,船(1)(3)符合,船(2)不符合,但经过区域放大后再进行SRM-边缘线段提取,长宽比符合.因此把经过SRM分割后的图像再经过LSD直线检测结果如图8. 图8 船舶目标检测结果Fig.8 Thedetection result chart of Ship target 为验证算法的有效性,收集沿海海域高分辨率遥感图像数据集,包含504幅图像,其大小为1 240×1 683,空间分辨率为每像素0.61m.文中算法运行在Windows 10操作系统下,处理器主频为2.4G.在遥感图像中,目标检测方法的基本评估指标[13]有:检测率与误检率. 检测率=检测到的正确目标数/实际目标数 (10) 误检率=检测到的错误目标数/实际目标数 (11) 由式(10)、(11)可知,检测率越接近1,误检率越接近0,表明检测方法的性能越好.为了证明算法的有效性,对52张原图进行检测,图6(a)即为其中一组原图.表3为文中方法Hough变换和SVM对比的实验结果. 表3 检测方法对比Table 3 Comparison of test methods 同时为了验证该算法不需要太多的样本,分别采用基于BP神经网络(特征提取网络)模型对504幅图像进行检测,且基于文中算法框架下的检测方法对52张图像进行检测.图9为两种方法的召回率-准确率的曲线图[14-15]. 图9 两种算法的PR曲线对比图Fig.9 Comparison of PR curves of two algorithms 从表3及图9可以知道,对52张图像文中算法的检测率达到了92%,高于Hough变换和SVM的传统检测算法,以及误检率、算法计算时间都高于其他检测算法.另外在保证较高准确率的同时,有较高的召回率与BP神经网络算法相似.因此文中算法不需要数量样本多而且算法的时间比较快,这些都基于LSD算法的效率以及分层线段结构的构出,加快算法对目标物的检测,针对海上目标具有较高的检测率与较低的误检率. 文中提出了一种新的分层线段提取方法来检测遥感图像中的船舶.在该方法中,采用改进的LSD算法进行初始线段检测、目标边缘线段区域的动态搜索和海上目标网络的先验知识来验证船舶目标检测结果.利用所提出的分层结构,能提高LSD用于线段检测的效率、目标边缘线段区域的动态搜索的准确性和读取网络的先验信息进行集成一体.实验结果表明,该方法对海上目标具有较高的检测率与较低的误检率,不需要太多的样本,且检测率与计算时间优于其他常用方法.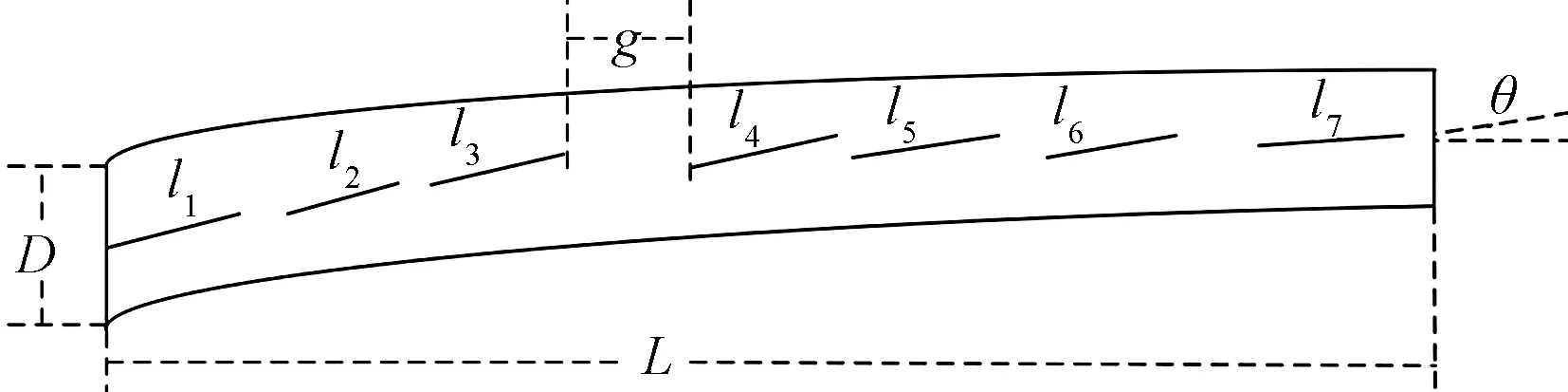
3 实验结果与分析



4 结论