Equivalent sliding mode fault tolerant control based on hyperbolic tangent function for vertical tail damage
2020-07-20ZhuangHuixuanSunQinglinChenZengqiang
Zhuang Huixuan Sun Qinglin Chen Zengqiang
(College of Artificial Intelligence, Nankai University, Tianjin 300350, China)(Key Laboratory of Intelligent Robots,Nankai University, Tianjin 300350, China)
Abstract:An equivalent sliding mode fault-tolerant control method with continuous switching is proposed for vertical tail damage. First, the nonlinear damage model of aircraft and the estimation of stability and control derivatives are introduced. Secondly, the linear sliding surface and the equivalent sliding mode controller are constructed, and the sufficient conditions for the stability of the damaged aircraft motion model are given by using the Lyapunov technique. The damage-tolerant controller is designed based on an adaptive sliding mode control for analyzing damaged aircraft systems. Furthermore, the hyperbolic tangent function is utilized to replace the symbolic function in the controller. The feasibility of the hyperbolic tangent function as the switching function is analyzed theoretically. Finally, the Boeing-747 100/200 model is taken as an example to demonstrate the efficiency of theoretical results by recognizing the structural fault of aircraft. Numerical results show that the control law has a positive impact on the performance of the closed-loop system, and it also has a better fault tolerance and robustness towards external disturbance compared with traditional methods of damaged aircraft stabilization control.
Key words:adaptive sliding mode; equivalent sliding mode; fault tolerant control; damaged aircraft; damage degree
In recent years, airplane crash cases all over the world have surged, one after another. Aspects on safety and reliability of aircraft systems have been investigated extensively. In particular, the importance of safety and reliability has always been a complex issue in aircraft science. The safety and reliability of aircraft have been the main focus of life cycle services, ranging from design and development to maintenance and operation. Due to the progress of technology development, civil aviation did profit from safe systems over the past years. Nevertheless, aircraft accidents and severe incidents did still occur. For example, at 08∶44 on March 10, 2019, a Boeing 737MAX belonging to Ethiopian airlines crashed, killing all 157 people, including eight crew members. It was the second Boeing 737MAX crash since October 2018. In the flight control field, the focus of the study is to develop more advanced control techniques that can prevent accidents in the future. The concept of aircraft fault tolerant control (FTC)[1-2]has been a frequently-used method in the field of aircraft research.
In this paper, we will not study the FTC of the vertical damaged aircraft. However, extensive research on FTC has been performed in both control oriented investigation and kinematics. In particular, a number of FTC-based methods have been applied in aerospace applications[3-5]. For example, Crider[6]investigated the aerodynamics of the aircraft controller design to accommodate the possible complete loss of the vertical tail. Bramesfeld et al.[7]discussed the piloting strategies for controlling a transport aircraft after loss of the vertical tail. Hitachi[8]investigated a damage-tolerant flight control system designed for propulsion-controlled aircraft (PCA). Hitachi et al.[9]developed a design of the robust PCA control system for vertical-tail-damaged aircraft by using theH∞-loop transfer recovery (H∞-LTR) technique and applied it to the Boeing-747 100/200 linearized model and nonlinear model. Li et al.[10]employed quadratic stabilization and guaranteed cost control to mitigate the damage.
In general cases, there are three primary types of faults: structural damage, actuator faults and sensor faults.However, compared with the analysis of actuator and sensor faults, there is little research on structural damage in the aerospace field[8,10-12]. The tolerant control for analyzing structural damage involves studying the engine loss, horizontal tail loss, vertical tail loss, the partial loss of wing, and so forth[6,13-14]. Various studies[3-5]were carried out tackling FTC methods for aircraft faults, where many FTCs for actuators or sensors were constructed. FTC addressed actuator faults and sensor faults[2,15].
Next, three examples are given to further understand the facts which were outlined above. The first example is the airbus A300 cargo plane, which had just taken off when Iraqi militiamen on the ground attacked it with shoulder-fired Russian SA-14 surface-to-air missiles; instantly, it lost all its hydraulics systems. The pilots managed to return to the airport, operating only with the engines[8]. The second example relates to American Airlines Flight AA191, where a McDonnell Douglas DC10 lost its left engine due to a partial loss of hydraulic system and subsequently crashed. The last incidence is the Japan Airlines Flight 123, which took off from Haneda airport in Tokyo to Itami airport in Osaka, due to the loss of its vertical tail and its hydraulics control. It crashed into the Mount Takamagahara on August 12, 1985[11].
Motivated by the above discussion,it is useful to investigate the fault-tolerant control capability related to such structural damage on control surfaces, lifting or air-frame. Sliding mode control (SMC) is a robust control method for nonlinear uncertain systems, which has attractive features to keep the systems insensitive to the uncertainties on the sliding surface. Furthermore, both the disturbances and the information of faults have been studied by using adaptive control strategies[5,16-20]. To make good use of the advantages of sliding mode control and fault tolerant control, a sliding mode fault-tolerant control method is designed for aircraft under model uncertainties[16], external disturbances and actuator faults. In finite time, they can accurately and rapidly track desired signals and stay there for all subsequent times.
Among different controller design methods, SMC is an efficient method, which is suitable for dealing with problems of incompletely modeled or uncertain systems. Numerous advantages on the basis of SMC are available for analyzing a damaged aircraft control system. Nevertheless, most of the techniques can only deal with the problems of uncertain moment inertia and external disturbances of aircraft, and few of them have explicitly addressed the damaged vertical tail faults. Therefore, it is important and necessary to develop a novel control method to handle damaged vertical tail faults during attitude maneuvers.
This paper will propose a fault-tolerant SMC strategy[21]for aircraft attitude stabilization under damaged vertical tail faults. For the first time, the novel sliding surface function is incorporated, in terms of both system states and inputs. Then, a sufficient condition, under which such type damaged aircraft system is stable, is proposed by means of the stringent linear matrix inequality (LMI) technique. By doing so, an adaptive kinematic sliding mode controller is designed for the aircraft with a damaged vertical tail, which can maintain the stability and reliability of the flight control system under different damage degrees. In order to demonstrate that the proposed schemes can guarantee the convergence of the closed-loop system’s state trajectories to the desired sliding switching in finite time and effectively weaken the chattering phenomenon for all subsequent time, the proposed control methods are applied to a conventional Boeing-747 100/200 model. Simulation results show the validity and efficiency of our proposed control methods. In other words, within the critical damage degree of the vertical tail, the aircraft still maintains stability.
1 Problem Formulation and Preliminaries
To simplify the vertical tail damage model, we need to provide the following assumption.
Hypothesis1In theX-Zplane as shown in Fig.1, the vertical tail damage is deemed to be symmetric. For this reason, it is hypothesized that it is negligible for the lateral center of gravity deviation caused by the damage. Simultaneously, compared with the total mass of the aircraft, we hypothesize that the mass loss caused by the vertical tail damage is ignored[10].
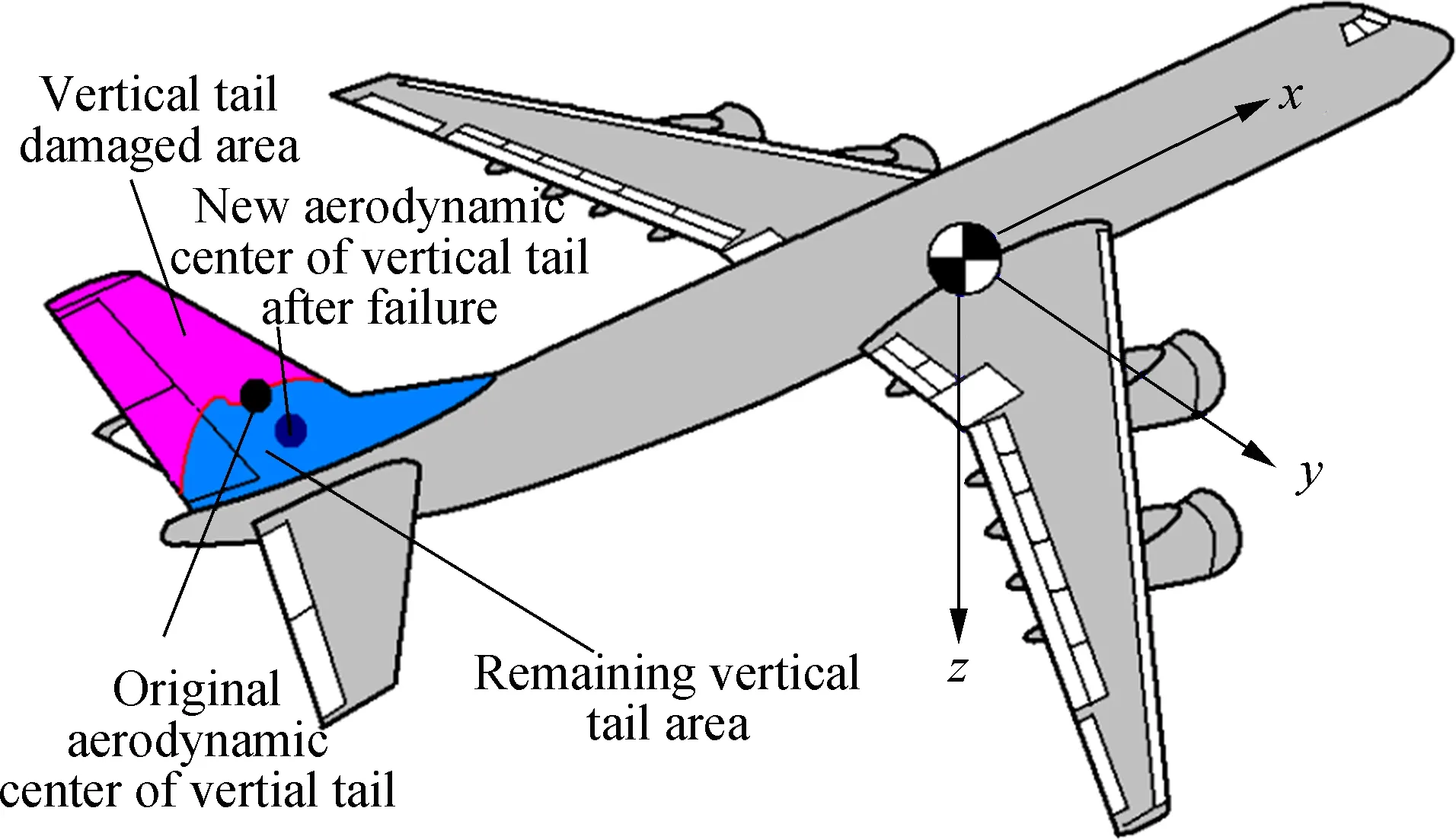
Fig.1 An aircraft with partial vertical tail loss, resulting in the aerodynamic center shift of vertical tail
1.1 Model of aircraft
In recent years, there has been excellent progress in the aircraft kinematics model. A standard method is considered a linearized model around a certain stable flight operation point. According to Ref.[22], the linearized state-space aircraft kinematics equation can be obtained:
(1)

(2)
whereAandBare the homologous coefficient matrices given above.
1.2 Stability and control derivative estimation
Since aircraft is inevitably subjected to vertical tail damage, the stability and control derivatives (SACD) caused by the damage have to be studied. In the following lateral directional stability derivativesCyβ,Cnβ,Clβ,Cyp,Cnp,Clp,Cyr,Cnr,Clr, the vertical tail damage triggers crucial parameter variations.
Let Δ express the damage-induced variation of derivatives. Consequently, a set of unknown derivative deviations can be described as ΔCyβ, ΔCnβ, ΔClβ, ΔCyp, ΔCnp, ΔClp, ΔCyr, ΔCnr, ΔClr.
An estimated representation of the derivative deviations with several hypotheses will be given based on Refs.[9, 23]. Above all, we hypothesize no shift in the center of gravity since the vertical tail damage/loss is deemed to be symmetric in theX-Zplane. Next, we assume that the mass loss caused by the vertical tail damage is negligible in comparison with the stability derivative deviations. The main conclusions of the estimated derivative deviation are as follows:
(3)
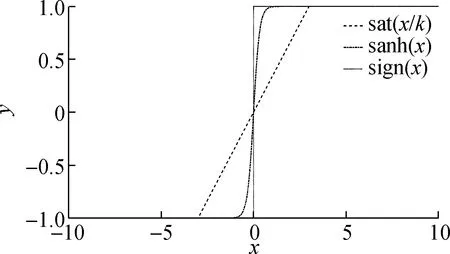
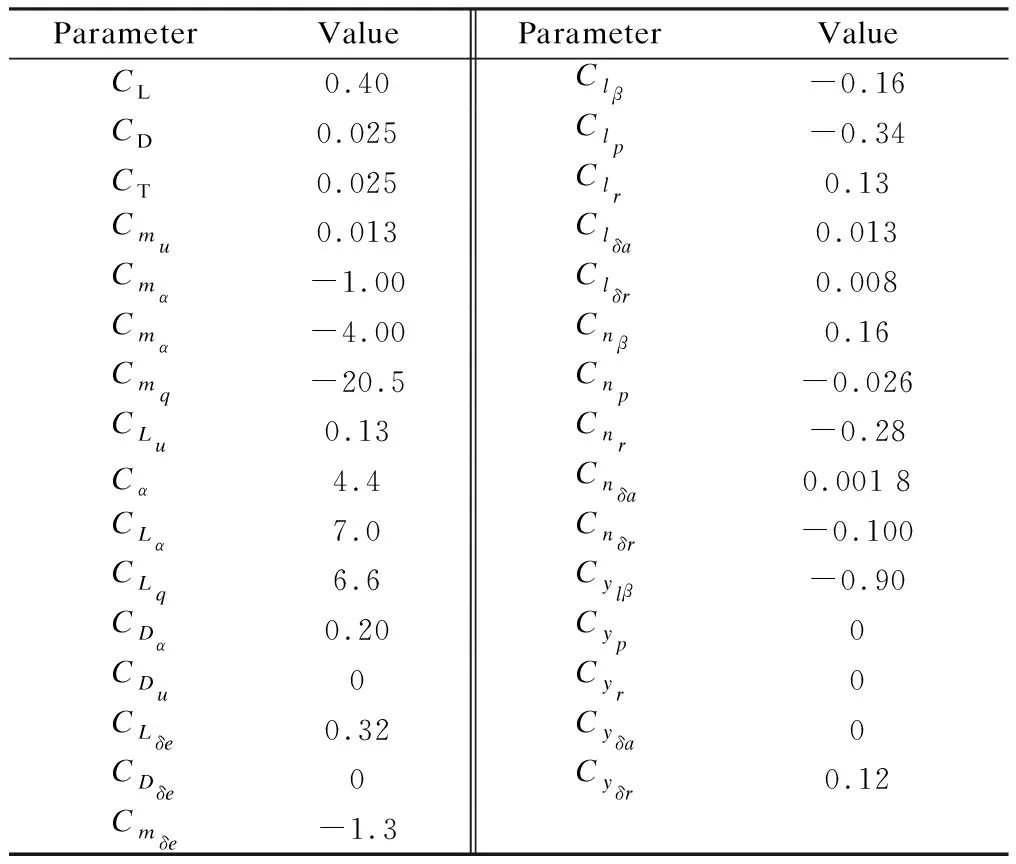
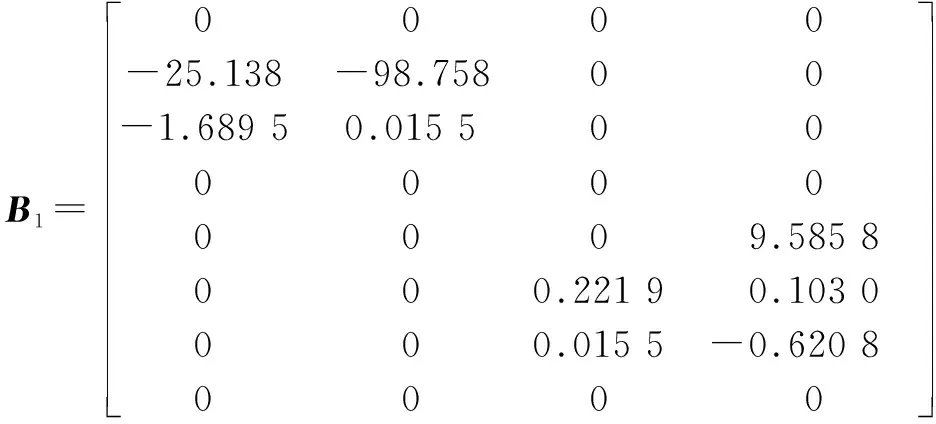
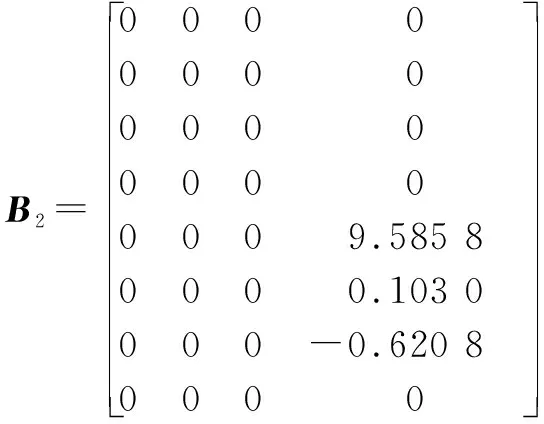
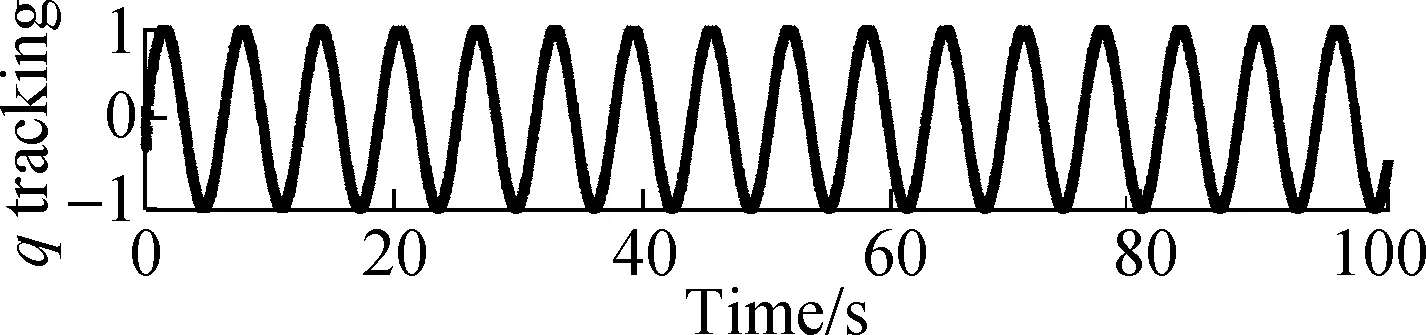
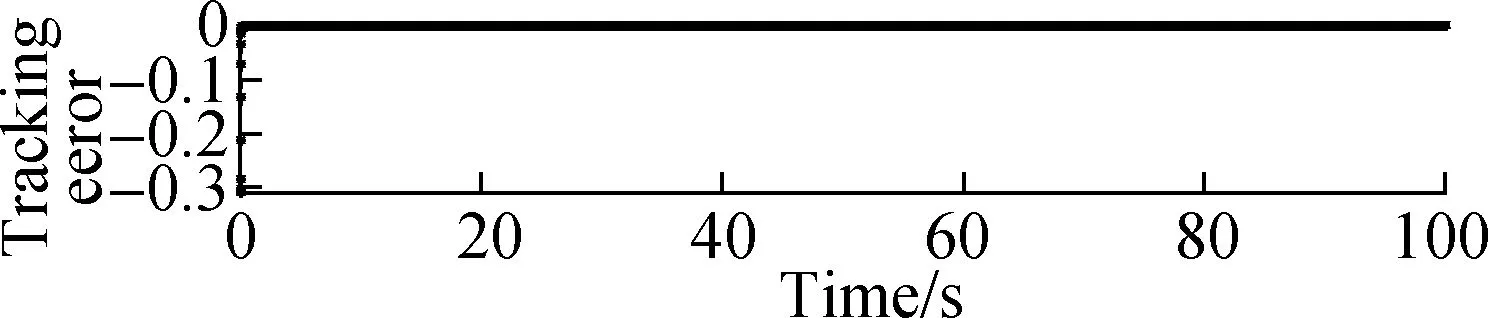
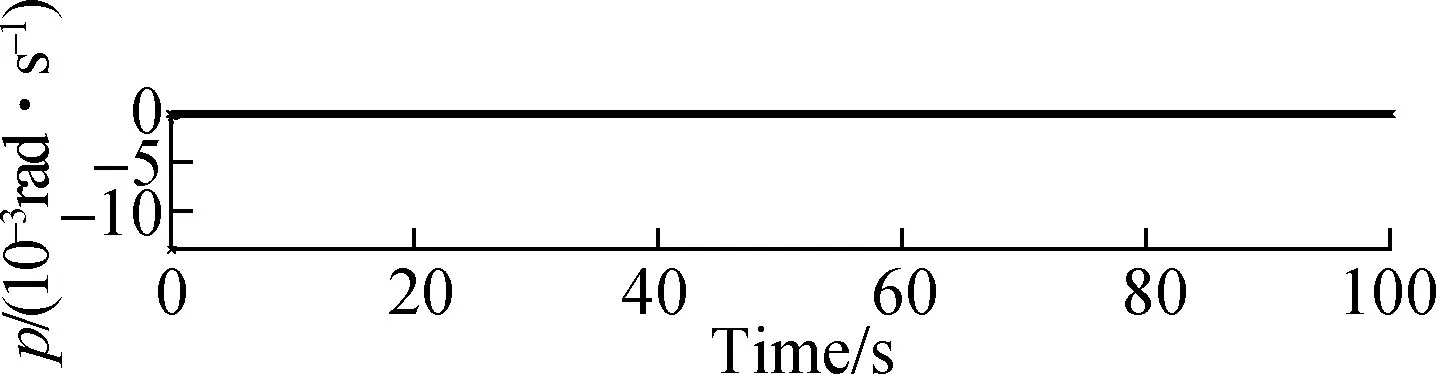
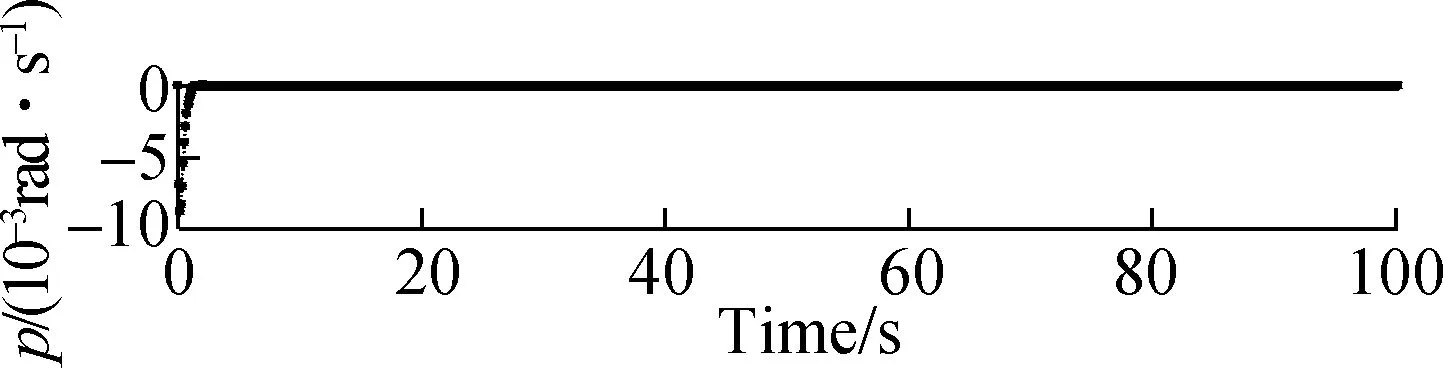
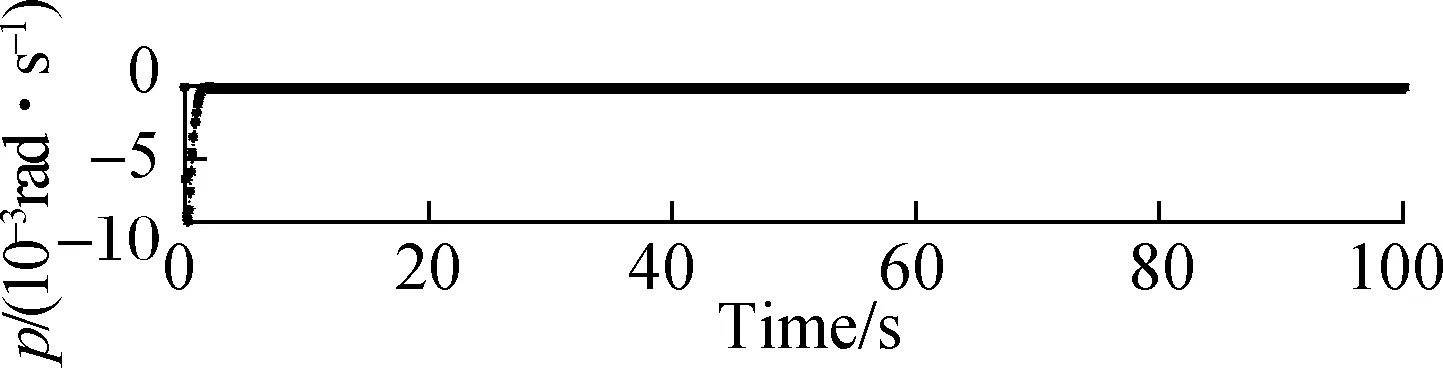
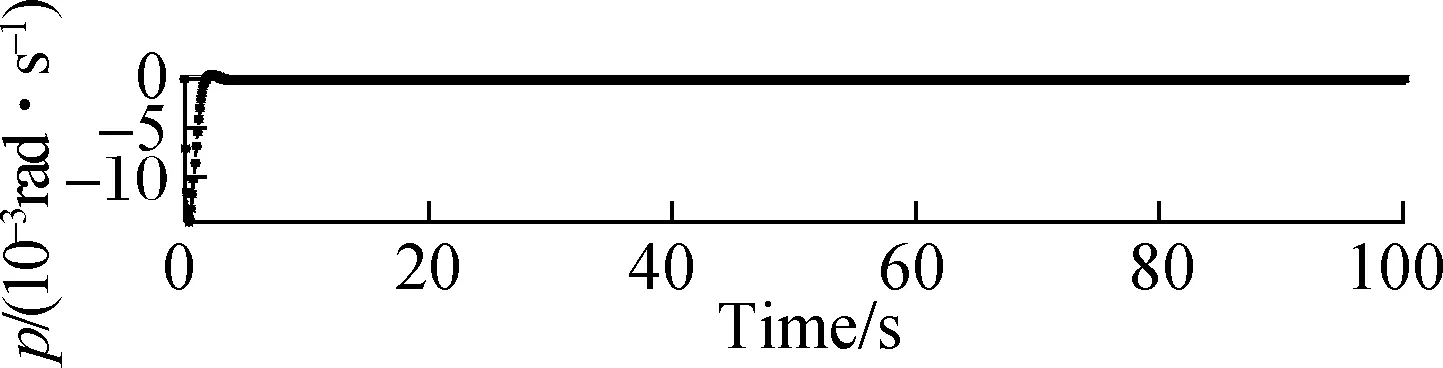
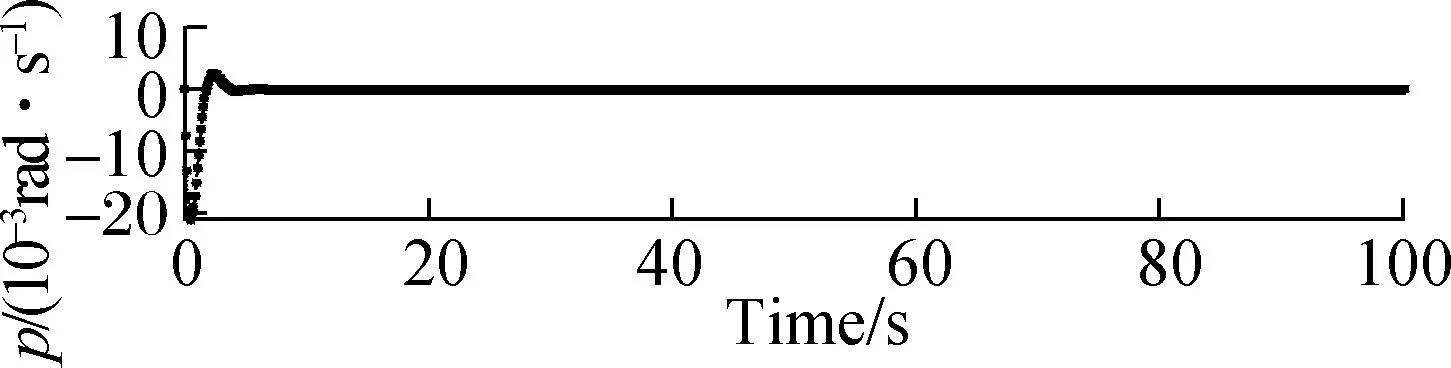
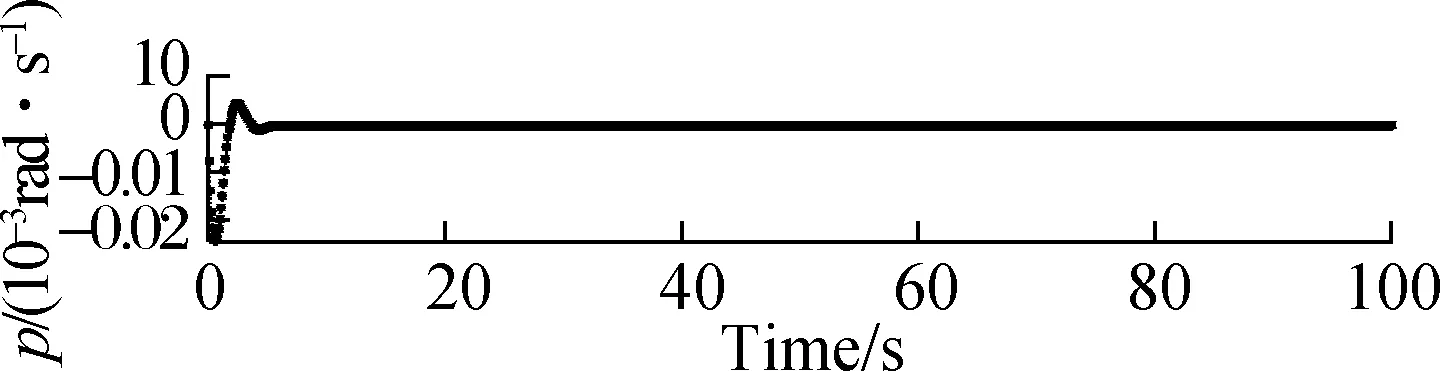
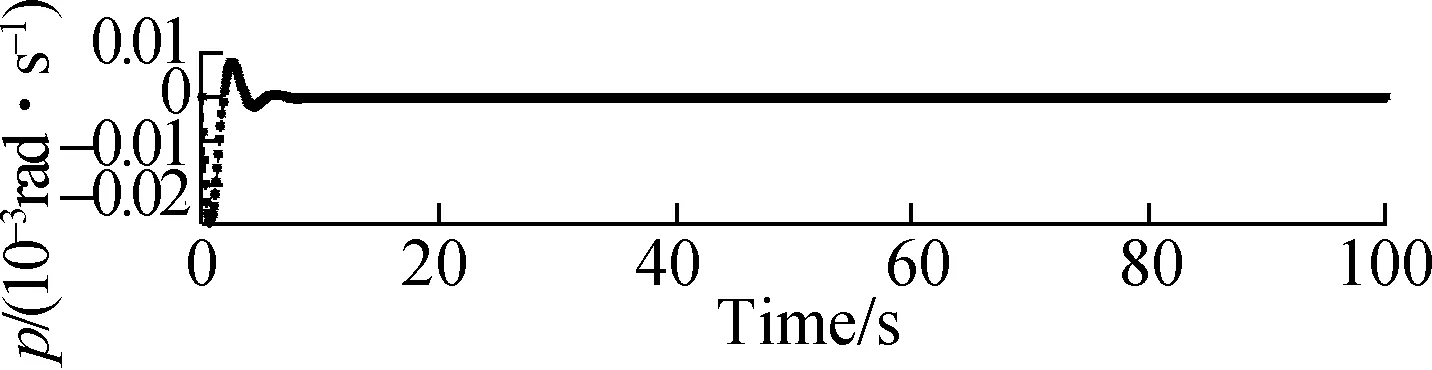
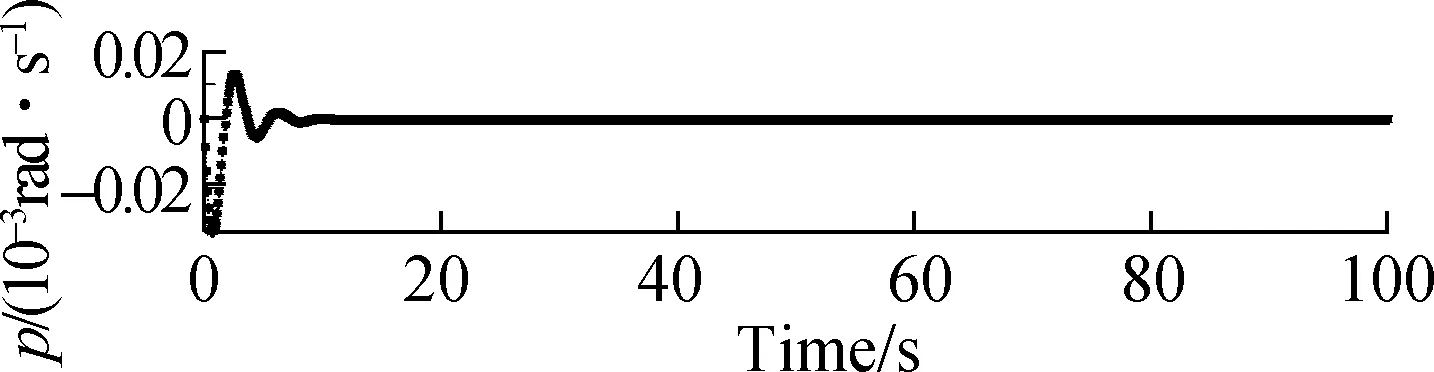
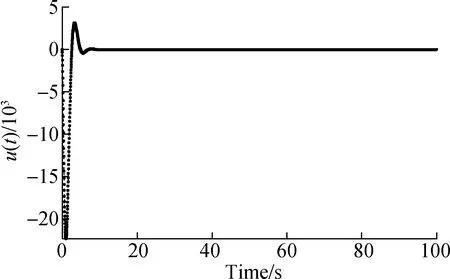
whereμis the parameter and it denotes the so-called degree of damage. Concretely speaking,μ=0 denotes the conventional case. 0 For illustration purposes, through the following example of the derivative deviation estimation onClβandCnβ, we learn that each derivative deviation can be indicated as the maximum derivative deviation, which is factored by the percentage of vertical tail damage or the damage degreeμ. In the same way, the detailed information of other stability derivatives can be obtained[8,10]. For a positive scalarρ, ΔCyδr≈ρΔCyβis hypothesized. Furthermore, when the vertical tail is completely damaged, i.e.,Cyδr|μ=1=0, the effect of the rudder is completely lost. Hence, the following equation can be obtained: We define In addition, Again, we define and we can obtain Through the depiction of a lateral stability derivative deviation matrix in Eq.(3), a parameterized model representation is acquired to treat the damaged aircraft kinematics. The creativity of the concept of damage degreeμallows for sliding mode FTC applications. By optimizing the damage degree value, it is possible to find the maximum allowable damage under the sliding mode FTC. A parameterized damaged aircraft model is introduced as follows. The system (2) suffered from vertical tail damage. Simultaneously, considering disturbances and uncertainties, system (2) can be rewritten as μ∈[0,1] (4) where The following three equations list the maximum variations of dimensional aerodynamic derivatives[10]. System (4) can be rewritten as the following form so as to handle the information of uncertainties and damage. f(x,t)+Βu(t)+Dd(t) (5) Hypothesis2It is hypothesized that ‖f(x,t)‖ Remark1As is known to all, lateral states are easily affected by vertical tail damage. For example, the roll ratep, pitch rateq, and yaw raterchange rapidly; hence, we choosey(t)={p,q,r}Tas the tracking objective in this paper, that is (6) whereC∈R3×8denotes the control output distribution matrix. The purpose of FTC design is to ensure the stability of the system and maintain certain performance requirements when damage occurs. In addition, another method is to design an FTC for the flight system with structural damage under the condition of given initial attitude angular velocity, so that the attitude angular velocity can track the desired signal accurately and quickly. Regardless of disturbance and uncertainty, the controlled object is described as (7) s(t)=Κe (8) (9) The equivalent controller is designed as Βu(t)eq=-f(x,t) (10) Βusw=τs+σsign(s) (11) whereτ=diag(τ1,τ2,τ3),σ=diag(σ1,σ2,σ3), ‖Dd(t)‖≤‖σ‖. The sliding mode control law consists of the equivalent control term and switching control term, Βu(t)=Βu(t)eq+Βu(t)sw (12) ΚC(-f(x,t)-τs-σsign(s)+f(x,t)-Dd(t))= ΚC(-τs-σsign(s)-Dd(t)) (13) Taking (14) then, we obtain (15) Remark2The parametersΚ,τ,σare introduced to improve the flexibility of the sliding surface. Remark3In this paper, one novel function, namely, the hyperbolic tangent function, will take the place of the signum function in the controller, which can weaken chattering generated by sliding mode switching. Additionally, parameterξcan adjust the speed of convergence of sliding surface, its value determines the change speed of inflexion point of hyperbolic tangent smooth function, that is, the convergence speed of the sliding surface is accelerated with the increase ofξ. Better yet, no one in the field has done that. (16) It is easy to prove that the state switching is faster whenξbecomes larger. Remark4From Fig.2, it is easy to see that the hyperbolic tangent function curve is smooth. The nature of the hyperbolic tangent function is better than that of the signum function and saturation function. This is a simple way to weaken the chattering generated by the switch function. Fig.2 Comparison of three curves Lemma1[25]For any givens(t), there isξ>0, and there is inequality. (17) Lemma2[26]The following inequality holds for anyξ>0 and any givens(t)∈R: (18) whereζis a constant satisfyingζ=e-(ζ+1)≈0.278 5. (19) whereαis an arbitrary constant. (20) According to Lemma 2, it can be obtained that (21) (22) It is further known that (23) Designing (24) we can obtain that (25) whereχ=τ‖ΚC‖;γ=-‖ΚC‖σηξ. (26) Remark5For the system (6) with the structural damage, the designed adaptive kinematic sliding mode fault-tolerant controller (12), (20) and (24) can not only compensate for the disturbances or uncertainties faultlessly but also have the tolerance capacity with the flight control system under a damage case. To demonstrate the validity and effectiveness of the proposed method, we applied it on the Boeing-747 100/200 model[5,10], the kinematic model of which is described in Eq.(26). The data is listed as follows: The altitude is 6 096 m; air density is 0.653 5 kg/m3; speed is 204.59 m/s; wing area is 510.95 m2; wing span is 59.74 m; wing mean chord is 8.32 m; mass is 288 969 kg; air velocity is 204.59 m/s; thrust is 44 770 N; pressure ratio is 0.469 5;Ixx=2.859×109kg/m2;Iyy=5.199 7×109kg/m2;Izz=7.807×109kg/m2;Ixz=1.523 7×108kg/m2. Tab.1 Aircraft parameters and derivatives (26) where The kinematic sliding mode surface matrices are chosen: Also, the control outputs are chosen as (a) Different damage cases are considered to occur at 1 s asμ=0, 0.25, 0.35, 0.45, 0.55, 0.60, and the corresponding simulation results are depicted in Fig.5 to Fig.12, which show the time responses of attitude ratesp,qandrbetween the cases of the free damage and different damage degrees. It is easily seen from Fig.5 and Fig.6 that the responses of attitude roll, pitch and yaw rates can track the desired signals in the structural damage cases ofμ=0 andμ=0.15, respectively. Obviously, whenμ=0, that is, the convergence speed of the attitude angle of the aircraft without damage is quite instantaneous; whenμ=0.15, the attitude angle tends to be stable at about 1 s, converging to 0. (a) (a) (a) As depicted in Fig.7 and Fig.8,the attitude roll, pitch and yaw rates can be tracked preferably when the damage degree increases toμ=0.25 andμ=0.35, respectively, and the accommodation time needs 2 and 3 s. Generally speaking, the proposed method can makeq,pandrtrack the desired signal at 2 s whenμ=0.25 and at 3 s whenμ=0.35. At about 3 s, the state tracking reaches the ideal state. However, asμincreases, the amplitude of the state response increases with a rate of 0.01 rad/s. It is worth mentioning that although the amplitude of the state response is increasing, it is still very small, which can be compensated for successfully based on the proposed FTC method. Fig.9 and Fig.10 show that the responses of the atti-tude roll, pitch and yaw rates can commendably track the desired signals in the structural damage cases ofμ=0.45 andμ=0.50. Whenμ=0.45 andμ=0.50, the accommodation time needs 6 s, and the amplitude of the state response significantly increases by about 0.02 rad/s. Also, there is oscillation in the state trajectory. (a) (a) (a) (a) Not only more accommodated time of these two cases is needed but also the amplitude of the state response significantly increases, that is, the proposed method can still finally track the system in the cases ofμ=0.55 andμ=0.60. Fig.11 and Fig.12 show that the responses of the attitude roll, pitch and yaw rates can commendably track the desired signals in the structural damage cases ofμ=0.55 andμ=0.60. The accommodation time needs 10 s and the amplitude of the state response significantly increases by about 0.03 rad/s. Also, chattering occurs, which is detrimental for aircraft flight. Hence, from Fig.5 to Fig.12, we can draw the conclusion that when the damage degree is larger than 0.50 and increases to 0.60, the targets cannot be tracked well. Simultaneously, we can draw another conclusion that the proposed method can allow the target to be tracked within 1 rad/s in the case of structural damage as damage degreeμ∈[0,0.5]; when damage is greater than 0.5, that is,μ∈(0.5,0.6], although the target can be finally tracked, the amplitude of the state response is rather large beyond the required range of the flight control system. Especially, when the amplitude of the roll rates is larger than 1.2 rad/s and the accommodation time is quite long whenμ=0.60. (a) (a) Fig.13 depicts the dynamics of the sliding function. Fig.14 depicts the dynamics of the dynamic sliding mode controller. Through the above analysis, it is not difficult to obtain the results that as damage increases. The tracking time has not increased too much, which proves that the adaptive fault tolerant sliding mode control technology has a strong robustness and is extremely insensitive to external interference. Fig.14 Sliding surface function This paper investigates the adaptive equivalent sliding mode FTC for damaged aircraft, in particular, for the vertical tail damage or loss, based on a novel sliding surface. At the same time, the impact of external disturbances is considered. First, the damaged aircraft model is introduced, and a novel nonlinear sliding surface function is given. Then, by using the linear matrix inequality technique, a sufficient condition is proposed for the linear parameter-dependent model. Furthermore, an adaptive sliding mode FTC is designed for the damaged aircraft. In order to demonstrate the efficiency of the designed methods for the damaged system, an example of a Boeing-747 100/200 model is given. The simulation results reveal that the proposed adaptive sliding mode FTC is quite robust and can also change flight body damage cases within 10 s when the damaged degree ranges from 0 to 0.60. However, the buffeting is now weaker, but it still exists. The tolerance of the proposed methods in this paper has some limitations which need to be tackled in the future. In other words, the controller maintains stability and desired performance even when the aircraft is in trouble. In future work, we will focus on the goal of design improvement, which should aim at minimizing the chattering and enhancing tolerance of damage degree.

1.3 Damaged aircraft modeling




2 Main Results
2.1 Equivalent control


2.2 Sliding mode control






2.3 Sliding mode control based on hyperbolic tangent function




3 Simulation
3.1 Flight conditions and data


3.2 Controller design results

4 Conclusion
杂志排行

Journal of Southeast University(English Edition)的其它文章
- Influence evaluation of titania nanotube surface morphology on the performance of bioelectrochemical systems
- Prediction method of restoring force based on online AdaBoost regression tree algorithm in hybrid test
- Arterial traffic signal coordination modelconsidering buses and social vehicles
- A customized extended warranty policy with heterogeneous usage rate and purchasing date
- Diagonal crossed product of multiplier Hopf algebras
- Online SOC estimation based on modified covariance extended Kalman filter for lithium batteries of electric vehicles