车道盲区预警在汽车驾驶辅助领域的应用①
2020-07-17袁俊
袁俊
(上海海拉电子有限公司南京研发分公司 江苏南京 211106)
车道盲区,通常是驾乘人员无法有效观察到的车道区域,虽然汽车有后视镜,可以辅助驾乘人员观察,但是视野有限,故需要车道预警提高驾乘的安全性。
1 车道盲区预警的分类
对于车道后方的盲区区域,主要分两块区域:固定区域和接近区域。对于预警等级通常分为两级:一级:当其他车辆进入本车盲区预警范围,且本车未有变道行为,预警灯常亮,一般预警装在后视镜上,如图1所示;二级:当其他车辆进入本车盲区预警范围,且本车有变道行为,预警灯闪烁,伴随预警声。关于上述盲区预警主要是通过后角雷达进行实现。
1.1 车道盲区预警的策略
车道大体划分为正后方车道,相邻车道,相邻车道三种,如图2所示,从车辆前进行驶时,对车辆安全的危害程度,通常仅对相邻车道的盲区进行预警。
车辆相邻车道的宽度是可以根据主机厂的要求自定义,通常为社会道路的一个车道宽,又由于城市道路与乡村道路的车宽略有不同,也可以本车车速变化控制盲区预警区域的车道宽度。

图1 后视镜上的预警灯
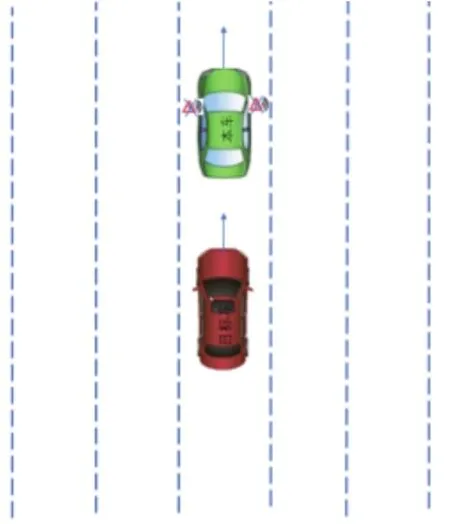
图2 (a) 正后方车道
1.2 车道固定盲区预警的策略
车道固定区域一般是是以前排第 95 百分位眼椭圆中心为起始线,本车后保边缘后方3m(可根据主机厂需求自定义),也可以加载动态扩展区域,根据本车车速变化,动态扩展固定盲区的纵向长度(如图3之3和4号区域所示)。
当后方来车行驶进入车道固定盲区区域时,立即触发车道盲区报警,即,存在就报警。(如图3之1和2号区域所示)
1.3 车道盲区接近区域预警的策略
当后方来车行驶进入车道盲区的接近区域(如图3之5和6号区域所示),与本车后保边缘发生碰撞的时间(TTC)小于设定时间时,则触发车道盲区报警。
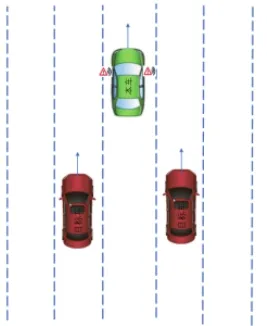
图2 (b) 相邻车道
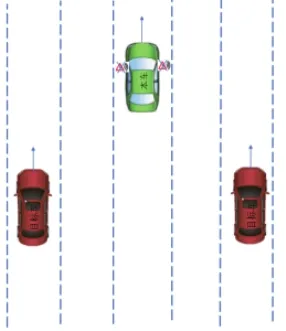
图2 (c) 相隔车道

图3 车道固定盲区的预警策略
2 车道盲区预警系统
车道盲区预警通常是由安装在车辆后保内的角雷达负责完成。当角雷达工作时,雷达通过内部的发波天线向外界发出雷达波束,经物体反射原始点,并通过收波天线收到发射的波束,通过内部算法(如傅里叶变换等),对原始点属性(如位置,速度,尺寸等)识别,对相关的原始点进行关联,形成运动目标物体,当目标物体满足预警条件(详见2.2和2.3),则触发车道盲区预警。通常的研发流程如下。
2.1 雷达传感器布置
此阶段位于研发的初期,在主机厂总装布置还未冻结阶段,也是后续车道盲区预警系统性能的基础。如果传感器位置布置的不理想,则会严重影响系统性能。布置要求如下。
(1)两个传感器通常分别位于后保左右两侧,传感器法向中心相对于整车坐标系横向在45°左右,纵向在0°左右,对于雷达视野较佳。
(2)雷达传感器的周边的走线需固定牢靠,原则上不允许线束位于雷达传感器的正前方,避免在车辆行驶时,线束在传感器前方摆动,而产生虚假目标物体,从而引发固定盲区的误报警。
2.2 后保要求
后保通常为塑胶件,不同颜色的后保都会含有不同程度的铅,雷达传感器发出的雷达波束经过后保,会发生方向(即角度)的变化,所以常要求主机厂提供三种含铅量不同的颜色后保,分别为含铅量高,中,低,并通过专用测试设备获得确定雷达波束变化情况。
2.3 标准测试与优化
标准场景,通过目标车与本车以不同的速度差分别在相邻车道,相隔车道进行超车试验,获取目标车的原始点的信息,调整原始点位置。最终达到目标车的原始点都在测试场景的实际位置,所产生的目标物体位置正确。
2.4 公共道路测试与优化
因为标准场景相对单一,而更多情况下,车辆是在真实的公共道路上行驶,所以有必要在公共道路环境中,测试与优化车道盲区预警系统的性能。
3 结语
任何产品功能的开发都需要相关标准或规范的约束,车道盲区预警功能也不例外,目前已有相关的标准(如IS0173871)或评价体系(I-VISTA2,3)对该功能进行了技术要求.而这些功能也已在车市上的越来越多车型上得以配置,使得车道盲区预警能帮助驾驶者对盲区的观察,从而降低交通事故的发生。随着汽车驾驶辅助技术的发展,车道盲区预警的技术能力也会随之提高,从而向驾驶自动化更迈进一步。
