基于LoRa和虚拟仪器技术的湖泊水质监测无人船系统
2020-07-17邓明海蒲星宇陈治同
邓明海 蒲星宇 陈治同
广西大学 电气工程学院 广西南宁 530000
1 研究背景和意义
在现代化的发展下,传统的固定监测站、实验室监测已经无法满足目前对大型湖泊水质监测的要求,需要更方便,更精确的水质监测方法。基于LoRa和虚拟仪器技术的湖泊水质监测无人船系统在一定程度上克服了传统水质监测方法耗时耗财耗力的不足,具有方便,实时,精确的特点,应用前景广阔[1]。
2 系统整体设计简介
本项目设计与开发基于LoRa无线通信技术、百度地图API位置实时显示技术、电子围栏技术以及无人船自动导航技术的多水质指标参数远程(0-8km)实时监测系统。该系统由无人船、各类水质传感器、GPS模块、电子罗盘、USB摄像头、超声波测距模块、LoRa无线通信模块、NI myRIO嵌入式控制器和上位机构成。系统总体结构图如下图所示:
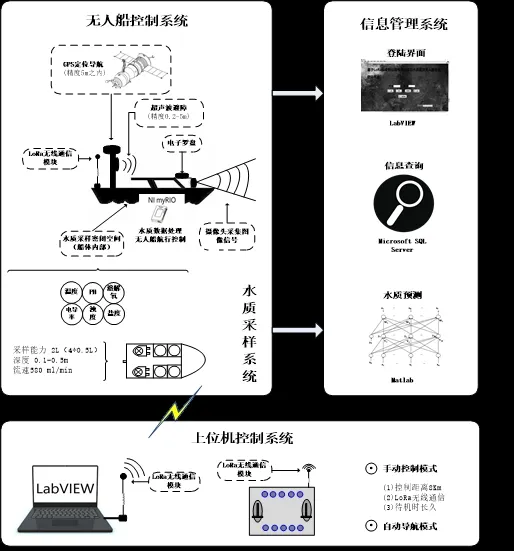
基于LoRa和虚拟仪器技术的湖泊水质监测无人船设计与开发总体结构主要由以下四个单元系统组成:
(1)无人船控制单元系统。由百度地图实时显示、增量式PID算法、图像数据处理、LoRa无线通信网络、电子围栏和自动导航等多项技术组成。
(2)水质采样单元系统。各传感器进行温度、PH、电导率、溶解氧、盐度、浊度和TDS水质信息的采集。
(3)上位机控制单元系统。包含手动操纵和自动巡航两种模式。
(4)信息管理单元系统。主要包含登陆界面、信息查询、报表生成和水质预测等功能。能够为水域环境保护、科学管理和经济效益提供支持和服务[2]。
3 系统运行流程简述
首先,上位机可设定多个目标点,GPS模块获取到当前无人船经纬度坐标;电子罗盘获取无人船姿态信息。航行环节可选择手动操纵或自动导航模式。选择自动导航模式时,无人船自动调整航行方向后按照规划的路线向目标点航行。在无人船航行过程中,超声波测距模块检测障碍物以执行避障程序,电子围栏约束无人船的航行区域,增量式PID算法使航行过程更加稳定。无人船航行到目标点后停止,打开摄像头对周围水域进行拍照,并将图片信息通过LoRa无线通信模块传输至上位机。水质采样环节也可选择手动操纵或上位机控制模式,流程为:首先抽取水体样本,各类水质传感器依次工作采集和分析水质信息,通过LoRa无线通信模块传输信息。目标点水体样本将会被保存,便于后续分析检测。完成采样与检测工作后,无人船可选择返航或前往下一目标点[3]。
4 结语
基于LoRa和虚拟仪器技术的湖泊水质监测无人船系统相较于其他无人船水质监测方法,使用了LabVIEW软件,易于数据信息处理与软件开发;使用LoRa无线通信技术,极限距离8km,解决了通信距离的问题;加入增量式PID算法,使得航行更加稳定;电子围栏的开发,保障了无人船的安全;合理的Modbus-RTU通讯协议设计,提高了数据传输的准确性和可靠性。
但同时,本系统仍存在一些不足,比如:缺少对风速、流速等外界环境干扰因素引入的控制;受限于船体大小,水质指标传感器数量较少;无人船航行避障功能单一;LoRa无线通讯模块传输字节个数和速度的限制等。但在项目研究过程中,能够为以后无人船自动控制算法提供一个良好的实验条件,也能够作为图像处理、水下通讯、水面避障、目标搜寻等研究的实验平台,随着改进,本系统也会逐渐变得完善。
