AlphaZero原理与启示
2020-07-16唐川陶业荣麻曰亮
唐川 陶业荣 麻曰亮


摘 要: 近几年,计算机围棋成功引发了又一轮的人工智能热潮,从计算机围棋中发展出来的AlphaZero框架成功地应用在其他完全信息条件下的二人有限零和博弈问题,进而展示出了深度学习和强化学习在智能决策领域的优异性能。本文首先介绍了AlphaZero框架中三个核心技术: 深度学习、强化学习以及蒙特卡罗树搜索,然后详细说明了AlphaZero框架两个关键阶段——AlphaGo和AlphaGo Zero的基本原理,最后,对AlphaZero框架提出了自己的思考,并基于对AlphaZero原理的剖析讨论了其对军事决策智能化的启示。
关键词:深度学习;强化学习;蒙特卡罗树搜索;AlphaZero;军事决策智能化;人工智能
中图分类号:TJ760; TP242.6 文献标识码: A文章编号:1673-5048(2020)03-0027-10
0 引言
象棋、圍棋、日本将棋等棋类博弈游戏一直是人工智能关注和研究的热门领域,一般将其抽象为完全信息条件下的二人有限零和博弈模型,该模型的含义是指在任意时刻,双方玩家(“二人”)都知道游戏的全部状态(“完全信息”),并且有限步(“有限”)之后游戏的结果非胜即负(“零和”),至多加上平局。双方在游戏中对抗(“博弈”),目的是自己获得尽可能好的结果。1997年发布的国际象棋人工智能“深蓝”轰动一时,其依赖强大的计算能力对国际象棋的所有状态空间进行穷尽式暴力搜索,用确定性算法求解国际象棋的复杂决策问题,体现了一种“机器思维”,然而这一方法并不能适用于围棋。围棋复杂的盘面局势评估和巨大的状态搜索空间,成为学界面临的巨大挑战。国际象棋每一步可供选择的走法平均为35种(即空间搜索宽度约为35),每盘棋平均需要80步决出胜负(即空间搜索深度约为80),所以如果要遍历完整下棋过程,整个搜索空间大约为3580;而对于围棋,其搜索宽度平均为250,搜索深度平均为150,整个搜索空间为250150,超过了可观测宇宙中的原子数目,因此无法采用暴力搜索方式。
为实现高智能的计算机围棋,早期的研究通过专家系统和模糊匹配来控制搜索空间规模,但一方面算法效果一般,此外当时的计算资源和硬件能力也捉襟见肘,所以效果并不明显。2006年,蒙特卡罗树搜索(MCTS)的应用引领着计算机围棋进入了新的阶段[1]。
2015年,Facebook人工智能研究院的Tian Y D结合深度卷积神经网络和蒙特卡罗树搜索开发出
的计算机围棋Dark Forest,表现出了与人类相似的下棋风格和惊人的实力[2]。2016年,基于深度强化学习和蒙特卡罗树搜索的AlphaGo击败了人类顶尖职业棋手,引起了全世界的关注[3]。2017年,Deep Mind在《Nature》上介绍了迄今为止最强的围棋人工智能AlphaGo Zero[4]。AlphaGo Zero不需要人类专家知识,只使用纯粹的深度强化学习技术和蒙特卡罗树搜索,经过3天自我对弈就以100比0的成绩完败了AlphaGo。AlphaGo Zero证明了深度强化学习的强大能力,也推动了人工智能领域的进一步发展。2017年底,Deep Mind
使用类似AlphaGo Zero的算法框架解决了诸多困难的棋类问题,证明其用于大多人类可以掌控玩法的棋类,乃至适用于所有完全信息条件下的二人有限零和博弈问题,并将这一框架命名为AlphaZero。
以AlphaZero为标志的技术突破,预示着一种具有直觉、认知和自我进化能力的新的人工智能时代的到来,也预示着智能化决策、智能化武器装备的发展以及智能化战争的到来。针对AlphaZero智能化方法框架的研究可以启发人工智能在智能指挥决策、智能化武器装备等军事领域的应用,为解决复杂军事指挥和智能决策问题指明方向[5-8]。 本文将对AlphaZero框架的两个主要发展阶段AlphaGo和AlphaGo Zero的技术原理进行深入剖析,并以通俗易懂的类比方式进行说明,最后基于对Alpha-Zero的剖析,谈谈对于AlphaZero以及军事决策智能化的思考与启示。
1 核心技术
1.1 深度学习
深度学习起源于传统的神经网络,是基于深度神经网络的一种学习方法,是机器学习的一个特定分支。它通过建立多个隐含层模拟人脑分析学习的机制,吸收大量数据的经验建立规则(网络参数),实现特征的自主学习[9],主要适用于无法编制程序、需求经常改变、有大量数据且无需精确求解的一类问题。深度神经网络组成主要包括输入、神经元单元、神经网络、成本函数和算法。
深度学习能够从原始数据中逐层提炼出更高级更抽象的特征属性,每层神经元的处理机制可看作是在对输入信号进行逐层加工,从而把初始的、与输出目标之间联系不太密切的输入表示转化成与输出目标联系更密切的表示,使得传统神经网络仅基于最后一层输出映射难以完成的任务成为可能[10]。换言之,通过多层处理,逐渐将初始的“低层”特征表示转化为“高层”特征表示后,即可用“简单模型”完成复杂的学习任务,而且网络层数越多,意味着能够提取到的特征越丰富,越抽象,越具有语义特征。
1.2 强化学习
强化学习(Reinforcement Learning,RL)又叫做增强学习,是近年来机器学习和智能控制领域的主要方法之一,它关注的是智能体如何在目标环境中采取一系列行为从而获得最大的价值回报。强化学习是机器学习中一个非常活跃且有趣的领域,相比其他学习方法,强化学习更接近生物学习的本质,因此有望获得更高的智能,这一点在棋类游戏中已经得到体现。
更抽象地,可以对强化学习所要解决的问题进行如下描述: 在目标环境(E)中存在多种状态(S,状态空间集合)阶段,通过行动(A,动作空间集合)可以使得状态发生转移(P,状态转移的条件概率矩阵),状态的变迁会带来奖励(R,价值函数),而目标就是学得一种策略(π)使奖励最大化[11]。因此强化学习中的目标环境对应一个四元组E=
通常情况,根据环境四元组E=
有模型学习表示四元组E=
在实际的强化学习任务中,环境中状态的转移概率P、价值函数R通常很难得到,甚至很难知道环境中一共有多少状态, 因此将学习算法不依赖于环境建模的方法称为免模型学习,这比有模型学习更困难也更实用。由于模型未知,无法通过计算的方式得到准确的最终奖励, 因此只能通过在环境中执行选择的动作来观察状态的转移情况以及得到的奖励,并利用蒙特卡罗思想,用多次“采样”的平均值来近似表示实际的价值函数,同时在多次“采样”过程中,发现存在的状态集合和状态之间的转移关系。换言之,通过不断的尝试,去近似估计未知参数,然后再通过对不同策略的尝试与评估,总结归纳并优化策略。
然而在实际任务处理过程中,由于资源、实时性、处理能力等方面的限制,“尝试”的机会往往是有限的,在这有限的尝试中,既需要通过探索去发现更多的选择并提高参数估计的准确性,另一方面还希望利用现有的最佳策略尽可能得到更多的奖励(类似于有限次数多摇臂老虎机赌博问题),因此,如何在探索和利用之间进行权衡是强化学习的一个关键任务。可以看出,探索的过程就是一个“试错”的过程,如果机器有一定的经验,可以有选择性地探索,加快探索效率;如果机器没有任何经验,也可以从随机开始,在不断试错的过程中成长,基于成长后的策略进行选择性的探索同样可以加快探索效率。所以强化学习可以不依赖任何人类知识而学习到目标知识,类似于人类探索未知事物的学习方式。
1.3 蒙特卡罗树搜索
蒙特卡罗树搜索(Monte Carlo Tree Search),一种通过随机游戏推演来逐渐建立一棵不对称搜索树的过程,它是人工智能领域中寻找最优决策的一种方法。
蒙特卡罗树搜索采用树状结构表征围棋博弈问题,初始阶段棋盘为空,这构成博弈树的根节点,此时可以选择的动作有361种,因此根节点就有361个分支,随机选择一个分支,并以此类推可以使得分支逐步生长,直到终结点(Terminal Node)游戏结束,这一过程就是一次遍历过程。如果通过足够多次的尝试将每一个节点都遍历到,就能生长出一棵完整的博弈树。基于这棵完整的博弈树,可以在任何状态下规划下一步的最优决策以走向胜利(在完整决策树已知的情况下,博弈游戏的胜负完全由猜先决定,即先手必胜或先手必败)。
若假设完整的博弈树已知,接下来就要规划下棋的策略。在规划的过程中,每一状态的动作选择依赖于对动作的价值评估或者说胜负评估,不仅要规划自己的策略,同时还要考虑对手的决策。在规划过程中,不确定对手的决策能力,但为了使决策规划更具实用性,只能假定对手会全力追求勝利,因此,规划的过程是一个基于价值评估的极小极大交替选择过程,也可以说是价值评估的传递过程[12]。
然而,这一过程的探索规模随搜索宽度和深度的增加成指数速度扩大,对于围棋这样的游戏,遍历得到整个博弈树是不现实的。人类棋手并不会对全部空间进行暴力搜索,而是基于棋感对少数候选方案进行一定步数的推演决策,显著降低搜索宽度和深度。
因此,在大空间博弈问题中,设计者往往采用低复杂度搜索算法,如蒙特卡罗树搜索算法。蒙特卡罗树搜索减少了搜索的宽度和深度,并在有限的遍历过程中,寻找到最有潜力的下一步行动,即形成决策。其主要思想是: 在宽度方面,通过一定次数的遍历后,部分分支会表现出更高的胜率,将有限的遍历集中在这类更有潜力的分支上,以减少搜索的宽度;与此同时,基于潜力的倾向性遍历会增加纵深方向单步搜索的计算复杂度,使得深度方向的搜索时间更长;因此在深度方面,为了避免复杂搜索算法导致的搜索代价增加,可以在搜索到某一中间节点时停止搜索,用基于简单算法(如均匀随机算法)的模拟过程执行到终结点或者在停止搜索后利用评估函数直接预测当前中间节点盘面的胜负。
蒙特卡罗树搜索是沿着博弈树向下的一组循环遍历过程。单次遍历的路径会从根节点(当前博弈状态)延伸到没有完全展开的节点。未完全展开的节点意味着其子节点至少有一个未访问到。遇到未完全展开的节点时,其一个未访问子节点将会作为单次模拟的根节点推演到终盘,随后模拟的结果将会反向传播回当前树的根节点,并更新博弈树的节点统计数据。一旦循环遍历过程受限于时间或算力而终止,下一步行动将基于收集到的统计数据进行决策。蒙特卡罗树搜索步骤如图1所示[13]。
由于蒙特卡罗树搜索采用了倾向性搜索算法以减少不必要的探索过程,但是这也增加了陷入局部最优的可能性,因此与强化学习类似,蒙特卡罗树搜索算法也存在探索和利用的权衡问题。
2 AlphaGo
2.1 AlphaGo的结构组成
AlphaGo由监督学习策略网络(Supervised LearningPolicy Network,简称SL策略网络)、强化学习策略网络(Reinforcement LearningPolicy Network,简称RL策略网络)、快速走棋策略网络(Rollout Policy Network)和价值网络(Value Network)组成,其中策略网络用于模拟人类的“棋感”,而价值网络用于模拟人类对盘面的综合评估,即盘面胜负评估。
SL策略网络是一个13层的深度卷积神经网络,该网络的输入是棋盘特征,也叫做盘面,其表现形式是一个19×19×48二值平面,19×19是围棋的棋盘布局,48个平面对应不同的盘面特征信息[14](如棋子颜色、轮次、气、打吃数目等)。输入经过13层深度卷积神经网络的逐层理解和分析,最终输出一个走棋策略pσ(a|s), 表示当前状态s下所有合法动作a的概率分布,其中σ表示该网络的权重参数。SL策略网络的决策计算速度是3 ms/步,主要用于在蒙特卡罗树搜索的选择阶段提供先验概率信息。
RL策略网络本质上是以训练好的SL策略网络为初始状态,通过强化学习过程优化SL策略网络中的网络权重参数后得到的新策略网络。因此其结构及输入、输出的形式同SL策略网络一样,标记为pρ(a|s), 该策略网络用于产生自对弈棋谱供价值网络进行训练。
快速走棋策略网络的学习模型是一个简单线性模型,输入简单且包含人工加工特征,使得输出pπ(a|s)的棋力较差,但其计算速度非常快,仅需2 μs,该策略网络用于蒙特卡罗树搜索的模拟评估阶段执行快速模拟。
价值网络依然是一个13层的深度卷积神经网络,其输入和SL以及RL策略网络一样,都是当前的盘面信息,区别仅在于其输出为对当前盘面结局(输赢的期望)的预测vθ(s),价值网络的输出同样用于蒙特卡罗树搜索的模拟评估阶段,以直接提供对叶节点盘面的结局预测。
可以看出, SL策略网络、RL策略网络及价值网络具有相似甚至相同的结构,这是因为深度神经网络的不同层的目标是为了提取输入信息的隐含特征,这些隐含特征对于预测输赢或决策落子都具有相关性。由于策略网络与价值网络的学习目标不同,在最后输出映射阶段两者的结构会有区别。另外,即使是目标相同的SL和RL策略网络,由于训练方法和数据差别,同样的隐藏特征对结果的影响力上会表现出差别,这一差别可通过网络中权重的差别体现出来,进而导致产生不同的策略。
2.2 离线训练过程
SL策略网络的训练数据来自于棋圣堂围棋服务器(Kiseido Go Server,KGS)上3 000万个专业棋手对弈棋谱的落子数据,
模拟专业棋手风格的准确度达到了55.7%。
快速走棋网络使用与SL策略网络相同的训练数据,只是提取的数据特征较简单,且使用线性回归方法进行训练。在牺牲了部分准确度的情况下极大地提高了走棋的速率。快速走棋网络与SL策略网络一样属于监督学习,类似于人类学习过程中背棋谱的学习阶段。
RL策略网络采用强化学习方法,训练时不需要额外的训练数据。第一步,先使用SL策略网络对RL策略网络进行初始化;第二步,将当前的RL策略网络与对手池(在第四步中生成)中之前的某个随机版本进行对局,得到棋局结果(输赢);第三步,根据棋局结果利用强化学习中的策略梯度算法,更新网络权重以最大化期望结果(赢);第四步,每500次迭代就复制当前网络参数到对手池中用于第二步的随机版本对局。重复上述四个步骤直到参数收敛稳定,即得到最终的RL策略网络。其中第四步记录的RL策略网络的历史版本是为了防止训练过程中出现过拟合现象,第二步的对局本质上是和“历史自我”进行的“自我对弈”。同时也能看出RL策略网络训练追求的目标是胜利,与SL策略网络追求的目标(尽可能地模仿专业棋手)是不同的,两者对弈结果统计,RL策略网络的胜率达到80%。类比人类学习过程,RL策略网络的训练近似于有一定基础的棋手通过与高手对弈不断提高棋力,追求制胜之道。
价值网络的训练数据来自RL策略网络“自我对弈”过程中产生的棋谱,根据产生棋谱的最終胜负结果,使用随机梯度下降法来最小化预测值vθ(S)与实际对弈结果z(赢为+1,输为-1)间的差值。训练好的价值网络可以对棋局进行评估,预测当前盘面的胜负期望,即胜负的概率。类比人类棋手,该训练过程近似于观摩大量高手的比赛后使自身具备了丰富的经验,结合当前盘面和过往经验能预测棋局的胜负。
2.3 在线对弈过程
AlphaGo在线对弈过程以蒙特卡罗树搜索为主要框架,并结合SL策略网络、快速走棋网络和价值网络以提高蒙特卡罗树搜索的效率。在对弈前,首先介绍每个蒙特卡罗树搜索节点(即盘面s)的统计信息。每一个节点s包含多条边连接着s与其子节点,每一条边对应一个合法的状态-动作对(s,a),每一条边对应一个六元组统计信息: {P(s,a),Nv(s,a),Nr(s,a),Wv(s,a),Wr(s,a),Q(s,a)},并将其记录在节点s处。P(s,a)是树搜索策略中需要使用的先验概率,在AlphaGo中P(s,a)是SL策略网络的输出。Nv(s,a)是遍历经过该边并利用价值网络评估的次数,而Nr(s,a)则是遍历经过该边并利用快速走棋网络评估的次数。Wv(s,a)表示Nv(s,a)次价值网络评估结果的累加值,Wr(s,a)表示Nr(s,a)次快速走棋评估结果的累加值。所以Wv(s,a)/Nv(s,a)和Wr(s,a)/Nr(s,a)分别表示价值网络和快速走棋网络模拟对盘面胜负的平均估计。Q(s,a)是价值网络和快速走棋网络评估均值的加权平均,表示对应边的联合平均胜负估值,如式(1),除了P(s,a)初始化为SL策略网络的输出,其余统计信息初始化值为零。
Q(s,a)=(1-λ)Wv(s,a)Nv(s,a)+λWr(s,a)Nr(s,a)(1)
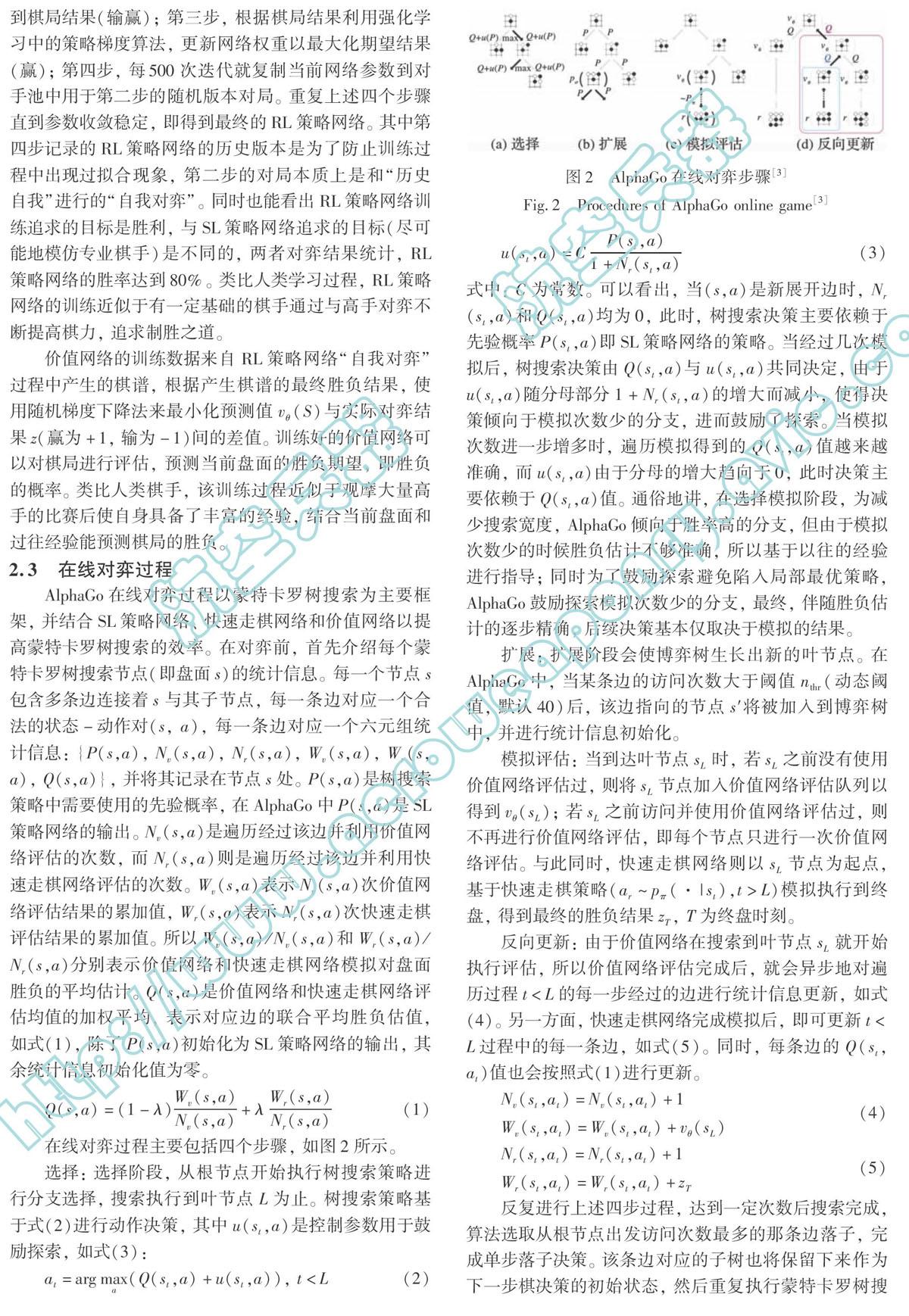
在线对弈过程主要包括四个步骤,如图2所示。
选择:选择阶段,从根节点开始执行树搜索策略进行分支选择,搜索执行到叶节点L为止。树搜索策略基于式(2)进行动作决策,其中u(st,a)是控制参数用于鼓励探索,如式(3):
at=argmaxa(Q(st,a)+u(st,a)), t 式中: C为常数。可以看出,当(s,a)是新展开边时,Nr(st,a)和Q(st,a)均为0,此时,树搜索决策主要依赖于先验概率P(st,a)即SL策略网络的策略。当经过几次模拟后,树搜索决策由Q(st,a)与u(st,a)共同决定,由于u(st,a)随分母部分1+Nr(st,a)的增大而减小,使得决策倾向于模拟次数少的分支,进而鼓励了探索。当模拟次数进一步增多时,遍历模拟得到的Q(st,a)值越来越准确,而u(st,a)由于分母的增大趋向于0,此时决策主要依赖于Q(st,a)值。通俗地讲,在选择模拟阶段,为减少搜索宽度,AlphaGo倾向于胜率高的分支,但由于模拟次数少的时候胜负估计不够准确,所以基于以往的经验进行指导;同时为了鼓励探索避免陷入局部最优策略,AlphaGo鼓励探索模拟次数少的分支,最终,伴随胜负估计的逐步精确,后续决策基本仅取决于模拟的结果。 扩展: 扩展阶段会使博弈树生长出新的叶节点。在AlphaGo中,当某条边的访问次数大于阈值nthr(动态阈值,默认40)后,该边指向的节点s′将被加入到博弈树中,并进行统计信息初始化。 模拟评估: 当到达叶节点sL时,若sL之前没有使用价值网络评估过,则将sL节点加入价值网络评估队列以得到vθ(sL);若sL之前访问并使用价值网络评估过,则不再进行价值网络评估,即每个节点只进行一次价值网络评估。与此同时,快速走棋网络则以sL节点为起点,基于快速走棋策略(ar~pπ(·|st),t>L)模拟执行到终盘,得到最终的胜负结果zT,T为终盘时刻。 反向更新: 由于价值网络在搜索到叶节点sL就开始执行评估,所以价值网络评估完成后,就会异步地对遍历过程t 反复进行上述四步过程,达到一定次数后搜索完成,算法选取从根节点出发访问次数最多的那条边落子,完成单步落子决策。该条边对应的子树也将保留下来作为下一步棋决策的初始状态,然后重复执行蒙特卡罗树搜索过程进行单步决策,最终走到终盘完成比赛。 AlphaGo算法的训练和对弈流程如图3所示。 2.4 AlphaGo中的特殊现象 (1)策略网络选择 基于强化学习的RL策略网络在与SL策略网络对弈时,胜率可达到80%,然而在线对弈过程中RL网络并没有直接参与决策,仅作为价值网络训练数据的提供者。这是因为实际实验中,同等条件下,基于SL策略网络的对弈效果更好。 还有一种说法是SL策略的探索更具有多样性,其策略在模仿专业棋手的棋风时,学到了“大局棋”概念,即跳出当前的局部布局而在其他位置提前进行布局的一种策略。 (2) 價值网络不使用人类数据训练 AlphaGo的价值网络用于评估盘面的胜负,然而供其训练的数据是强化学习网络自己产生的,而不是直接使用专业棋谱。直接原因是RL策略网络是3个策略网络中的最强策略。从另一个角度考虑,SL策略网络不如RL策略网络是因为其模拟专业棋手的相似度只有55%,如果直接使用专业棋谱数据(100%相似度)是否会达到更好的效果?对此有学者认为,人类数据并不适合价值评估。很多人类的棋局都是因为中间偶然的失误导致了全盘覆灭(所谓“一着不慎满盘皆输”),其中的偶然性非常大,盘面的估值瞬息万变,所以棋局的结果离理想的估值差距较大。不如让AlphaGo培养自己的“感觉”,自己的“胜负观”,而不是轻易被人类棋局的胜负所左右。 (3) 价值网络与快速走棋网络 按常理揣测,基于强大的RL策略网络训练出来的价值网络,在评估方面应该超越快速走棋网络。然而,实际实验当中,同等条件下单纯基于价值网络评估的效果并不如单纯基于快速走棋网络评估的效果,而两者的结合使得效果有进一步的飞跃。对此现象,可以理解为AlphaGo自己产生的“胜负观”和人类经验形成的“胜负观”具有一定的互补作用,而价值网络的不足主要是由于网络本身的表达能力不够。 (4) 自暴自弃 当AlphaGo在判断自己胜算不足时就会自暴自弃,走棋具有随机性。笔者推测,在胜算不足时,各个分支的Q(s,a)值都不高(必输情况下所有Q(s,a)值均为零),此时为了增加探索性的一些扰动机制会使得基于Q(s,a)值的倾向性搜索失去作用,搜索过程呈现扰动机制的随机性。对于此问题,有人建议在胜算不足的情况下,将模拟对弈的对手替换为棋力较弱的模型,以保持系统的“战斗意志”。但这种方式间接将胜利寄托在对方的失误。 (5) “神之一手” 在AlphaGo和职业棋手李世石比赛的第四盘中,李世石第78手成为棋局的点睛之笔,使其获得了比赛的唯一一场胜利,这一手棋被称为“神之一手”。赛后,AlphaGo的设计团队多次分析实战数据,结论都是“人类棋手几乎不会下的一手”,“人类棋手下这步棋的概率不到万分之一”。由于基于人类训练数据产生的SL策略网络的相似度仅有55%,所以无法评论AlphaGo忽略这“万分之一”可能性的原因,是相似度不够高还是这一步真的出乎意料。但不管是哪种原因,究其本质还是在探索和利用的天平太偏向于利用,忽视了小概率走法。 3 AlphaGo Zero AlphaGo Zero是AlphaZero框架围棋系列的最新一款产品,是AlphaZero框架设计思路的具体表现形式。AlphaGo Zero摆脱了人类知识的约束,能够在没有人类知识做指导和训练的条件下学得围棋的下法和人类棋谱中的“定式”,并且发现人类未知的新“定式”,创作了知识,也印证了强化学习的强大。 3.1 AlphaGo的不足 (1) 结构复杂 AlphaGo由4个网络构成:3个策略网络,1个价值网络。策略网络功能相同,却无法互相替代。价值网络和快速走棋网络用途相同,但功能互补无法舍弃。这既浪费了有限的平台算力(间接影响了棋力),也暗示了AlphaGo的网络并不完美。 (2) 人类经验的羁绊 “尽信书,不如无书。”以往的人类经验可以减少搜索空间,并使算法快速稳定地收敛到更优策略,但同时也局限了人类的探索范围。AlphaGo中的强化学习网络就尝试摆脱人类经验的束缚,但其初始状态仍然是人类经验的体现。 (3)RL策略网络仍然存在性能瓶颈 强化学习利用策略模拟、策略改进、策略再模拟的迭代过程来优化网络结构,其效果固然强大,但策略改进的效率决定了其最终效果,目前AlphaGo简单地通过自我对弈还无法达到最佳的效果,因此从现有策略如何提高是一个关键问题。 (4) 探索与利用 探索与利用的权衡对于强化学习以及蒙特卡罗树搜索方法的性能都具有显著的影响。尽管AlphaGo中加入了丰富探索多样性的机制,但目前并没有理论可以证明怎样的平衡才能达到最佳。式(2)中的红利u(st,a)虽然鼓励探索,但是式(2)本身属于确定性决策方式(决策时动作选择不是概率性的采样),使得某一分支占优后很难跳出去探索其他分支。“神之一手”的出现进一步印证了AlphaGo探索不足的问题。 以上不足为AlphaGo Zero的设计指引了方向,将在AlphaGo Zero的设计思想中看到针对以上问题的处理。 3.2 AlphaGo Zero的结构组成 AlphaGo Zero将原先两个结构独立的策略网络(SL策略网络和快速走棋网络)和价值网络合为一体,合并成一个深度神经网络。在该神经网络中,从输入层到中间层的权重是完全共享的(AlphaGo中SL策略网络和价值网络结构共享,权重独立),最后的输出阶段分成了策略函数输出和价值函数输出。此外,在AlphaGo中采用的13个卷积层网络被替换成19(扩展版为39)个残差模块(或残差网络),形成了深度残差神经网络fθ(s),通过实现更深的神经网络以提取到更丰富、更抽象的输入特征,并具有了更强的表达能力。AlphaGo Zero的网络结构如图4所示。 深度残差网络输入的盘面状态s是19×19×17的二值平面,相比于AlphaGo的策略网络更加简洁。主要有3部分内容: 己方棋面,对方棋面,当前执棋颜色。输入信息经过深度残差网络的处理,得到盘面的深层次特征,基于这些特征分别利用策略输出模块和价值输出模块得到下棋策略p和盘面胜负评估v,其中p为361维向量,表明当前盘面下,不同动作选择的概率。在AlphaGo Zero中没有采用快速走棋网络,其蒙特卡罗树搜索的模拟评估阶段完全依赖于深度残差网络的价值输出v。 3.3 AlphaGo Zero训练与对弈过程 AlphaGo Zero的离线训练过程蕴含了在线对弈的经过,所以本节以离线训练过程介绍为主,并细致介绍其中的蒙特卡罗树搜索算法。 3.3.1 离线训练过程 AlphaGo Zero仅含有一个深度残差网络fθ(s), 输出为(p,v),其训练的目标即为优化深度残差网络的权重参数θ,使得策略p棋力更强,而胜负评估v更准确。 初始状态时,由于没有人类知识的介入,网络的权重参数θ以随机值进行初始化,得到初始深度残差网络。将初始深度残差网络作为当前的最优策略,迭代进行自我对弈、训练优化以及对决评估步骤,最终实现AlphaGo Zero的离线训练过程,如图5所示。 自我对弈: 使用基于当前最优策略的蒙特卡罗树搜索进行自我对弈的单步决策。每次单步决策需要经过1 600次蒙特卡罗树搜索模拟,得到并记录下当前局面st(t表示自我对弈的第t个单步)的策略πt。策略πt相比于当前最优策略是一个更好的策略,因此蒙特卡罗树搜索进一步提升了强化学习的策略改进速度。根据策略πt,系统采样进行当前盘面的动作决策,得到动作at~πt。因此单步决策是一个概率性决策过程,每个动作都有选择的可能性,选择概率服从策略πt,这增加了探索的丰富性(改善了AlphaGo的不足(4))。持续执行单步决策过程,直到进行到终盘T时刻,得到结果z,并将该过程记录下的每一个(st, πt, z)存入棋谱池,用于为后面的训练优化提供数据。重复进行自我对弈过程,丰富棋谱池,达到一定次数后,进行参数的训练优化过程。 训练优化: 棋谱池中有大量数据,从最近500 000盘对弈中进行均匀随机的盘面采样,采样的数据(s,π, z)用以优化深度残差网络的参数。在已知fθ(s)=(p,v)的情况下,优化目标包括希望胜负评估v与实际结果z尽可能一致;希望策略p能尽可能接近策略π。参数优化过程基于损失函数梯度下降方法,由于深度残差神经网络同时输出策略和胜负评估,因此损失函数同时考虑胜负評估值和落子概率: loss=(z-v)2+(-πTlg p)+cθ2(6) 式中: 第一部分考虑的是胜负评估结果v与实际结果z的方差;第二部分是输出策略p和策略π的交叉信息熵,交叉信息熵越小两个策略就越相似;第三部分是用来防止过拟合现象,其中c为常数。训练优化过程持续进行,每完成1 000次训练步骤就产生一个记录点,记录该次训练后的新参数。该参数对应的策略将用在对决评估阶段,与当前最优策略竞争,确定新的当前最优策略。 对决评估: 为了保证数据质量越来越好,需要评估新的记录点对应策略和当前最优策略的优劣,择优作为接下来的当前最优策略进行自我对弈。 对决过程中,双方依次使用蒙特卡罗树搜索进行单步决策,每次单步决策执行1 600次模拟,直到比赛结束;400场比赛后,若记录点对应策略的胜率达到55%以上,则用其替换当前最优策略,并基于新的最优策略通过自我对弈继续产生更好的数据;否则,放弃该记录点,仍采用当前最优策略进行自我对弈。可以看出,对决评估过程本质就是在线对弈的过程。 重复以上三个步骤,深度残差网络的棋力就会不断提升。 实验表明[4],AlphaGo Zero 结构经过3天训练就可以达到AlphaGo Lee(打败李世石的AlphaGo版本)的棋力;经过40天训练,其棋力接近稳定,较AlphaGo Lee提升了近39%。 3.3.2 AlphaGo Zero中的蒙特卡罗树搜索 在AlphaGo Zero中,蒙特卡罗树搜索算法贯穿了离线训练和在线对弈的整个过程。并且,相比于AlphaGo中的蒙特卡罗树搜索算法,AlphaGo Zero进行了改进优化,使得其最终得到了更好的性能。 AlphaGo Zero中的蒙特卡罗树搜索算法步骤如图6所示。相比于AlphaGo,AlphaGo Zero将扩展和模拟评估两个步骤合并为一个;另外由于删除了快速走棋网络,博弈树的每条边(s,a)的统计信息简化为{N(s,a),W(s,a),Q(s,a),P(s,a)},其中N(s,a)表示该边的模拟次数,W(s,a)是该边所有模拟过程胜负评估值的总和,Q(s,a)=W(s,a)/N(s,a)是胜负评估均值,P(s,a)是执行树搜索策略时的先验概率。 选择: 该阶段和AlphaGo的选择阶段基本一样,从根节点s0开始,基于树搜索策略选择路径,直到叶节点sL。在t 扩展与评估: 扩展与评估阶段同时完成扩展以及胜负评估任务。在该阶段,当搜索到达叶节点sL后,盘面sL送入到深度残差网络中进行胜负评估得到v(sL);同时将sL进行扩展(在AlphaGo Zero中扩展阈值为1,即每次模拟都会扩展分支,而在AlphaGo中扩展的阈值为40),扩展后的每条边(sL,a)的统计信息初始化为{N(sL,a)=0,W(sL,a)=0,Q(sL,a)=0,P(sL,a)=pa}。 反向更新: 将深度残差网络的胜负评估v(sL)反向更新t 重复以上三个步骤1 600次,即可根据统计信息进行单步决策。在AlphaGo中,在线对弈时的单步决策完全依赖于动作模拟的次数,而在AlphaGo Zero中,为了增加探索性,在单步决策时引入了退火思想。若将策略向量π表示成概率形式,蒙特卡罗树搜索输出的策略如式(10),表示在盘面s0的条件下选择动作a的概率。在每盘棋的前30步单步决策时,参数τ=1,每个动作a的概率就是模拟过程出现的频率,由于对弈过程是基于π(a|s0)的采样决策,因此在开盘的前30步落棋具有丰富的可能性。在30步之后,τ→0,此时式(10)的分布极其尖锐,出现次数最多动作的概率趋向于1,其他动作的概率均趋向于0,尽管此时仍然是基于π(a|s0)的采样决策,但实际效果已转化为确定性决策。这一机制是考虑到开局时未来变化空间大,无论是策略抑或是胜负评估都不甚准确,此时需要增加探索性避免陷入局部最优;随着盘面推进,局势变化可能性逐步收缩,策略和胜负评估的指导性更准更强,此时则应该遵循蒙特卡罗树搜索的决策,追求更高的胜率。 π(a|s0)=N(s0,a)1/τ∑bN(s0,b)1/τ (10) 3.4 类比小结 通过分析发现,AlphaGo Zero针对AlphaGo的不足做出了许多改进,两者技术体系的改进框图如图7所示。 4 思考与启示 4.1 对AlphaZero的思考 AlphaZero框架是以AlphaGo Zero为基础的深度强化 学习框架,它去除了AlphaGo Zero中围棋独有的算法特征,保留了普适性的学习思想、方法和技巧,适用于完全信息条件下的二人有限零和博弈模型,而其中关于探索与利用的平衡、策略推演方式、结果评估方法等方面对于更广泛的强化学习领域同样具有借鉴意义。AlphaZero框架的伟大之处在于第一次让机器可以不通过任何棋谱,不依赖任何人类的经验,在只告诉其规则的前提下,成为一个围棋高手。这种无师自通的学习模式在人工智能发展道路上具有里程碑意义。但同时在很多人工智能推广应用上也存在一些局限,因为严格讲,围棋规则和判定棋局输赢是一种监督信号,所以,说人类无用,或说机器可以自己产生认知都是对AlphaZero理解的不精确。此外,目前AlphaZero框架仍然需要上百萬盘的自我对弈才能真正掌握围棋,而这与人类掌握围棋的过程还有明显的区别,可能是思考方式上的本质差别,也可能是学习方式上的差别导致的学习效率的差别。因此AlphaZero的出现固然伟大,但不要对其过分解读。 通过对AlphaGo和AlphaGo Zero的分析对比,能够描绘出AlphaZero框架形成的发展历程并发现其中的关键点。首先,深度神经网络的结构非常重要,网络的组织形式与层数决定了网络表达的丰富性和能力。然后,目前深度学习和强化学习的理论基础还很薄弱,许多研究都是基于探索性或启发式的方法,新方法的优劣评估也存在许多定性的经验性解读。例如深度学习、强化学习以及蒙特卡罗树搜索之间的结合之前也有相关的尝试,但是结合方法的不同,或者某些参数的差别导致性能相差甚远,对此现象缺少理论的剖析支撑。这一方面指引学者要加强理论方面的研究,增强算法的可解释性,从理论层面阐述方法的优劣,并以理论的指导去探究更优的方法;另一方面,对于“聪明”的科技工作者这也是一个机会,可以在较少的理论基础条件下通过其他领域知识的触类旁通或启发式的探索,在智能决策领域做出突破。其次,探索和利用的平衡问题可以显著影响算法性能,通过AlphaGo和AlphaGo Zero的对比可以发现,通过加强探索,强化了系统选择的多样性,降低了陷入局部最优解的可能性;但同时增加了计算的复杂度,阻碍了算法的收敛,无法满足具有实时性或准实时性的系统要求。最后,算力问题是智能决策发展的关键支撑。本文并未过多地提及平台计算能力问题(文献[3-4]均对计算能力对棋力的影响进行了研究),但在实际应用中平台算力决定了训练速度和在线对弈时蒙特卡罗树搜索的模拟速度,进而决定了“推演模拟”的精度。平台的计算能力主要由处理芯片决定,业界的巨头公司均在人工智能芯片领域投入大量人力和财力,这将是我国人工智能未来发展的一个重要建设领域。 4.2 AlphaZero对军事应用的启示 象棋、围棋等博弈类游戏,本身就是对于军事战争的抽象模拟,因此博弈类游戏的智能决策对于军事决策的智能化具有重要借鉴意义。在2007年人机国际象棋大赛中,“深蓝”一举击败人类棋手卡斯帕罗夫,在全世界引起轟动,同时也引起美国军方高度关注,提出了“深绿”计划。“深绿”是美国防部高级研究计划局(DARPA)2007年起支持的一项指挥决策领域研究项目,原计划执行3年,至今未完成,且项目内容已大大减少。该计划完成的系统将嵌入美国陆军旅级之上C4ISR的战时指挥决策支持系统。“深绿”计划核心思想是借鉴“深蓝”,预判敌人的可能行动,从而提前做出决策[5],也就是类似AlphaZero的一个博弈决策系统。 航空兵器作为未来军事战争的重要作战力量,同样需要面临即将到来的智能化战争考验。目前导弹、飞机中的雷达、制导、目标选取、飞行控制都在向智能化方向发展[16],在航空兵器智能决策发展早期,通常使用专家系统与数据存储和通信网络技术结合,用于机载预警和控制系统等。专家系统通过模型库、数据库和方法库的信息输入,根据自身知识进行推理决策,完成飞行控制或帮助判断敌军位置和动机;而从单一功能上升到战斗机等完整武器系统指挥,则需要引入类似AlphaZero这类更复杂、更智能的决策技术,特别是在导弹、飞机、无人机这类高速应用场景,人类的反应难以适应战争的“秒杀”节奏,此时智能化决策技术将成为目前可预见的最佳选择,2016年美国辛辛那提大学研发的“阿尔法”AI就成功操控F-15战机击败了飞行员驾驶的F-22战机[17]。更进一步,针对群体装备系统或体系指挥控制装备,还需要兵棋推演这类更宏观的智能决策系统,一方面可更准确地预测战术/战略实施效果,另一方面可通过兵棋推演系统去验证和优化作战方案。这类兵棋推演系统也是AlphaZero的重要舞台。 因此,AlphaZero的出现为“深绿”、“阿尔法”或者类似系统的设计、训练和学习方法提供了新的借鉴。可以分析和理解战场特性构建符合战场态势的深度神经网络结构;然后利用已有的演习和试验数据来构建战场环境模型;之后抛弃已有演习数据,基于战场环境的反馈,通过自我对战的模拟,从零开始逐步学习、理解并认知战场态势,模拟期间合理平衡探索和利用,在有效的时间内得到尽量准确的决策。 然而,AlphaZero的博弈与实际战争仍然存在着极大的差别。AlphaZero的目标是处理完全信息条件下的二人有限零和博弈问题,而战场指挥问题的本质是一个态势感知与估计、实时响应、非完全信息博弈和多智能体协同等多个问题构成的复杂性系统问题[8]。 对于态势感知与估计问题,AlphaZero能够提供较好的借鉴示范,但是对于如何描述战场态势输入、表征和抽象战场模型、构建战场环境,如何选择与战场特性相适应的网络结构等问题仍然需要更进一步的研究。 对于实时响应问题,一方面,AlphaZero的博弈本质是一个回合制游戏,而战争则是即时战略类游戏,要解决有限状态与战场连续性的矛盾;另一方面,这也对平台计算能力提出要求,尤其在2018年4月爆出美国制裁中兴事件后,高性能处理芯片将成为一个重要制约因素。 对于非完全信息博弈问题,一方面,敌人不是合作者,永远不会有足够多的信息,甚至会提供虚假数据信息误导决策。另一方面,演训数据较少缺乏学习样本,如果利用模拟方式生成训练数据,则要对模拟的逼真程度提出严格的要求。 对于多智能体协同问题,实际战场往往是多人或多方的合作通信及竞争关系,AlphaZero的双人博弈模型明显不足,需要将单一模型扩展为多个智能体之间相互合作、通信及竞争的多智能体深度强化学习系统[18]。 需要特别说明,在航空兵器的飞控、制导等具体任务领域(即不考虑航空兵器的整机指挥或多体的兵棋推演任务),对于AlphaZero,需要有选择地吸收借鉴。常见的专家系统或基于遗传算法的智能决策,通常需要提供经过人工模型处理后的信息(如弹道轨迹模型输出、飞行轨迹模型输出、地理信息系统输出、姿态信息等),这类似于AlphaGo早期训练时的棋谱学习,这些模型的输出可以理解为信息或知识的提炼,但也可以看作既有知识的约束。对待这一情况,不能简单借鉴AlphaZero摒弃人类经验的做法,因为在围棋领域里,由于其规模庞大、价值反馈滞后,人类既有知识归纳和总结存在许多错误,这类知识的继承和学习确实会羁绊和约束学习者;但是航空领域的知识结构成熟且具备一定共识,因此在知识正确的前提下,既有知识反而可以使决策快速收敛,而且经过既有知识“洗涤”过的信息更易处理,实时性好,因此更适用于航空兵器领域中高速物体的实时决策。鉴于此种情况,在航空兵器具体任务领域,可以结合既有知识和AlphaZero的创新学习能力,在实施任务决策时仍然采用基于既有知识模型的专家系统,而知识模型的生成则采用AlphaZero的思想进行创造性的学习。此外,基于AlphaZero思想的模型学习系统可以直接部署于飞行器,将实际飞行任务作为训练数据提供给它,实现在线学习,使其可以实时更新知识模型。 因此,尽管AlphaZero的出现,给予了军事智能决策新的启示,但对于两者之间的差别仍有许多问题亟待解决。目前即时战略游戏的电脑智能研究对于智能决策的实时响应、多智能体协同问题上具有较多的借鉴意义[19],且新公布的AlphaStar模型已经战胜专业玩家,这将是智能决策技术的又一里程碑[20];而“一对一无限注德州扑克”作为非完全信息博弈代表,目前也受到广泛关注,基于深度强化学习算法的Deep Stack在该游戏中已经具备了职业玩家的水平[21]。未来我国需要加强在相关领域的探索研究,并大力发展人工智能领域的芯片设计及制造行业,推动我国军事决策智能化发展,在未来作战指挥决策中取得致胜先机。 参考文献: [1] Kocsis L, Szepesvari C. Bandit Based Monte-Carlo Planning [C] ∥Proceedings of the European Conference on Machine Learning,2006: 282-293. [2] Tian Y D, Zhu Y. Better Computer Go Player with Neural Network and Long-Term Prediction[C]∥ ICLA, 2016. [3] Silver D, Huang A, Maddison C, et al. Mastering the Game of Go with Deep Neural Networks and Tree Search [J]. Nature, 2016,529(7587): 484-489. [4] Silver D, Schrittwieser J, Siomonyan K, et al. Mastering the Game of Go without Human Knowledge [J]. Nature, 2017, 550(7676): 354-359. [5] 胡曉峰, 郭圣明, 贺筱媛. 指挥信息系统的智能化挑战——“深绿”计划及AlphaGo带来的启示与思考[J]. 指挥信息系统与技术, 2016, 7(3): 1-7. Hu Xiaofeng, Guo Shengming, He Xiaoyuan. Challenges to Intelligent Command Information System: Reason and Revelation on “Deep Green” Planand AlphaGo[J]. Command Information System and Technology, 2016, 7(3): 1-7. (in Chinese) [6] 胡晓峰. 军事指挥信息系统中的机器智能:现状与趋势[J]. 人民论坛·学术前沿, 2016(15): 22-34. Hu Xiaofeng. Machine Intelligence in Military Command Information System: Status and Trends[J]. Peoples Forum·Academic Frontier, 2016(15): 22-34. (in Chinese) [7] 陶九阳, 吴琳, 胡晓峰. AlphaGo技术原理分析及人工智能军事应用展望[J]. 指挥与控制学报, 2016, 2(2): 114-120. Tao Jiuyang, Wu Lin, Hu Xiaofeng. Principle Analysis of AlphaGo and Perspective in Military Application of Artificial Intelligence[J]. Journal of Command and Control, 2016, 2(2): 114-120. (in Chinese) [8] 唐振韬, 邵坤, 赵冬斌,等. 深度强化学习进展:从AlphaGo到AlphaGo Zero[J]. 控制理论与应用, 2017, 34(12): 1529-1546. Tang Zhentao, Shao Kun, Zhao Dongbin, et al. Recent Progress of Deep Reinforcement Learning: from AlphaGo to AlphaGo Zero[J].Control Theory & Applications, 2017, 34(12): 1529-1546. (in Chinese) [9]Lecun Y, Bengio Y, Hinton G E. Deep Learning[J]. Nature, 2015, 521(7553): 436-444. [10] Goodfellow I, Bengio Y, Courville A. Deep Learning[M]. The MIT Press, 2016. [11] 周志华. 机器学习[M]. 北京: 清华大学出版社, 2016. Zhou Zhihua. Machine Learning[M]. Beijing: Tsinghua University Press, 2016. (in Chinese) [12] 28天自制你的AlphaGo (6) : 蒙特卡罗树搜索(MCTS)基础[EB/OL].(2017-03-07)[2019-04-25]. https:∥zhuanlan.zhihu.com/p/25345778. Make your AlphaGo in 28 Days (6): The Monte Carlo Tree Search Basics[EB/OL]. (2017-03-07)[2019-04-25]. https:∥zhuanlan.zhihu.com/p/25345778.(in Chinese) [13] Browne C B, Powley E, Whitehouse D, et al. A Survey of Monte Carlo Tree Search Methods[J]. IEEE Transactions on Computational Intelligence and AI in Games, 2012, 4(1): 1-43. [14] 深度解读AlphaGo算法原理[EB/OL]. (2016-04-05)[2019-04-25]. https:∥blog.csdn.net/songrotek/article/details/51065143. Deep Interpretation of the AlphaGo Algorithm[EB/OL]. (2016-04-05)[2019-04-25].https:∥blog.csdn.net/songrotek/article/details/51065143.(in Chinese) [15] 郑宇,张钧波. 一张图解AlphaGo原理及弱点[EB/OL]. http:∥www.kddchina.org/#/Content/alphago. Zheng Yu, Zhang Junbo . Illustrating the Principle and weaknesses of AlphaGo in a Picture[EB/OL]. [2019-04-25].http:∥www.kddchina.org/#/Content/alphago.(in Chinese) [16] 程进, 齐航, 袁健全, 等. 关于导弹武器智能化发展的思考[J]. 航空兵器, 2019, 26(1): 20-24. Cheng Jin, Qi Hang, Yuan Jianquan, et al. Discussion on the Development of Intelligent Missile Technology[J]. Aero Weaponry, 2019, 26(1): 20-24. (in Chinese) [17] 石纯民. 当“阿尔法”走上战场[N]. 中国国防报,2016-07-11. Shi Chunmin. When “Alpha” Goes to the Battlefield[N]. China National Defense News, 2016-07-11. (in Chinese) [18] 赵冬斌, 邵坤, 朱圆恒,等. 深度强化学习综述:兼论计算机围棋的发展[J]. 控制理论与应用, 2016, 33(6):701-717. Zhao Dongbin, Shao Kun, Zhu Yuanheng, et al. Review of Deep Reinforcement Learning and Discussions on the Development of Computer Go[J]. Control Theory & Applications, 2016, 33(6): 701-717. (in Chinese) [19] Vinyals O, Ewalds T, Bartunov S, et al. StarCraft Ⅱ: A New Challenge for Reinforcement Learning [EB/OL].(2017-08-16)[2019-04-25]. https:∥arxiv.org/pdf/1708.04782.pdf. [20] AlphaStar: Mastering the Real-Time Strategy Game StarCraft Ⅱ[EB/OL]. (2019-01-24)[2019-04-25]. https:∥deepmind.com/blog/alphastar-mastering-real-time-strategy-game-starcraft-ii/. [21]Moravcˇík M, Schmid M, Burch N, et al. DeepStack: Expert-Level Artificial Intelligence in Heads-up No-Limit Poker[J]. Science, 2017, 356(6337): 508-513. Principle and Enlightenment of AlphaZero Tang Chuan,Tao Yerong*,Ma Yueliang (Luoyang Electronic Equipment Test Center,Luoyang 471000,China) Abstract: In recent years, the success of computer Go has triggered another round of artificial intelligence boom. The AlphaZero framework developed from computer Go has been successfully applied to problems which are two-person zero-sum finite game under other complete information conditions. The success of AlphaZero shows the excellent performance of deep learning and reinforcement learning in the field of intelligent decision-making. In this article,three core technologies in the AlphaZero framework, that are deep learning, reinforcement learning and Monte Carlo tree search, are introduced. Then the basic principles of the two key phases of the AlphaZero framework (that is,AlphaGo and AlphaGo Zero) are detailed. Finally,some thoughts on the AlphaZero framework are put forward, andits enlightenment on the intelligence of military decision based on Al-phaZero principle analysis is discussed. Key words:deep learning;reinforcement learning;Monte Carlo tree search;AlphaZero;intelligence of military decision; artificial intelligence 收稿日期:2019-04-25 作者簡介:唐川(1988-),男,河南开封人,博士,助理研究员,研究方向为人工智能芯片设计。 通讯作者:陶业荣(1976-), 男,河南太康人,学士,高级工程师,研究方向为人工智能技术试验与评估。 E-mail:taoyerong@126.com 引用格式:唐川,陶业荣,麻曰亮. AlphaZero原理与启示 [ J]. 航空兵器,2020, 27( 3):27-36. Tang Chuan, Tao Yerong, Ma Yueliang.Principle and Enlightenment of AlphaZero[ J]. Aero Weaponry,2020, 27( 3): 27-36.( in Chinese)
