写字机器人书写特征的识别与研究
2020-07-16胡爱华
刘 畅 黄 钰 胡爱华
(北京市公安司法鉴定中心,北京100054)
随着科技的进步和人工智能时代的到来,在今后的鉴定工作中可能会遇到利用写字机器人进行书写的案件,这是文检鉴定人员应当引起高度重视的问题。本文简要介绍了现代写字机器人发展的背景、工作原理,通过对写字机器人书写的实验样本材料进行检验,研究总结出写字机器人书写的主要特征,便于今后开展文件司法鉴定工作。
1 现代写字机器人发展背景及应用
现代写字机器人是在人工智能的技术构架上研发而来,2013年,Sonny Caberwal创立了机器人公司邦德,推出了一台能够模拟真人书写的写字机器人[1](见图1)。2016年,Evil Mad Scientist团队开发出名叫Axi Draw的写字机器人,它可以使用签字笔、圆珠笔、钢笔和各式墨水,适用于各种尺寸的纸张,因此应用范围更广(见图2)。
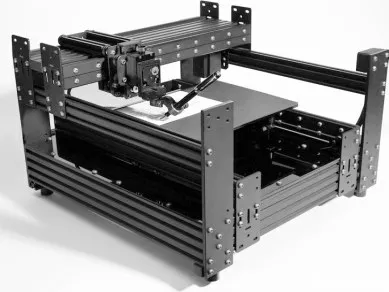
图1 邦德写字机器人

图2 Axi Draw写字机器人
国内关于写字机器人相关的研究较多,其最初的应用主要是在工程绘图领域和教学、科普领域。让写字机器人引起大众关注的是2019年学生买写字机器人代写作业的新闻,在电商平台上以“写字机器人”为关键词搜索,出现的记录多达数千条,外形从简单的金属十字架到方桌式样,价格从几百元到上万元不等,主要用在填写记录、抄写笔记等简单、重复性较高的工作场合。
2 目前热销的写字机器人工作原理及模仿笔迹方式
2.1 工作原理
目前网上热销的写字机器人多为“十字型”结构,在左侧底座和右侧底座之间安有横向光杆,在横向光杆上安装可以活动的运动中枢,再在运动中枢上安装与横向光杆垂直的纵向光杆,左侧电机和右侧电机能驱动笔架模组、运动中枢及纵向光杆在横向光杆上作X轴运动,或者驱动笔架模组和纵向光杆相对运动中枢作Y轴运动,三个轴的结合控制笔杆的运动来模仿人书写的动作。
2.2 模仿笔迹方式
目前利用写字机器人模仿他人笔迹的方式主要有两种:一是利用已知字迹“一字一仿”:将被模仿人字迹原件扫描后导入编辑软件制作成计算机能够识别的字体,由写字机器人书写。二是利用已知字迹来模仿未知字迹,深度学习神经网络技术是比较热门的技术,理论上有足够数量的被模仿人字迹,AI就能学习掌握被模仿人的书写特征,生成未知的和被模仿人书写风格一致的模仿笔迹。
3 写字机器人书写特征的检验和分析
3.1 材料与方法
3.1.1 实验设备
本实验室购置的Axi Draw写字机器人一台(以下简称写字机器人1,见图3);金属仿生写字机器人一台(以下简称写字机器人2,见图4)。

图3 Axi Draw写字机器人

图4 金属仿生写字机器人
3.1.2 实验材料
晨光0.5mm黑色中性笔、百佳牌70g普通复印纸。
3.1.3 实验仪器
瑞士宝捷拿NIRVIS文件检验仪。
3.1.4 实验样本
利用两台写字机器人配套软件内置的不同字体书写了相同内容的字条各一张(见图5~图6)。
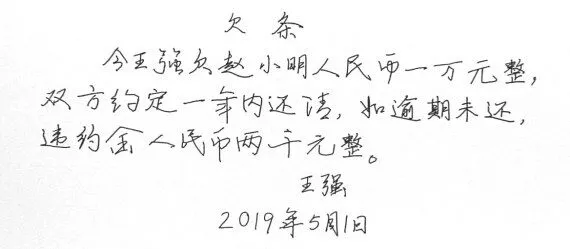
图5 写字机器人1书写欠条
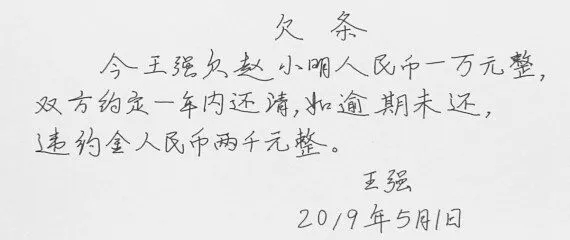
图6 写字机器人2书写欠条
3.2 样本的检验
分别利用瑞士宝捷拿NIRVIS文检仪对实验样本进行放大观察检验。
3.3 检验结果及分析
3.3.1 在文检仪侧光下观察,两份字迹样本均呈现出均匀、平实、一致的笔迹压痕,无轻重变化,缺乏轻重疾徐的节奏感。
特征产生的原因:写字机器人笔迹压力的大小是由Z轴运动参数设置控制的,参数设置完成后,一次书写形成的字迹笔压保持一致。
3.3.2 在文检仪白光下观察,两份字迹样本墨迹浓淡均匀,笔画粗细相等,无自然人书写时字迹颜色浓淡的变化和笔画粗细的变化。
特征产生的原因:写字机器人在书写过程中笔夹的倾斜角度是固定不变的,因此形成的字迹墨迹浓淡均匀,笔画粗细相等。
3.3.3 在文检仪白光下观察,两份字迹样本在起收笔处均可见明显的点状触压墨点痕迹,单字的第一笔起笔处容易出现露白痕迹,收笔无峰。
特征产生的原因:写字机器人的工作原理是机械组件沿z轴上下运动来模仿人书写的起笔和落笔动作,在起收笔时笔尖和纸面呈一定角度生硬接触和抬起,从而形成明显的顿压痕迹,在书写单字第一笔时,因接触压力小瞬间不着墨容易产生露白痕迹(见图7)。
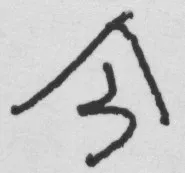
图7 写字机器人书写起收笔特征(左为写字机器人1书写,右为写字机器人2书写)
3.3.4 在文检仪白光下观察,两份字迹样本运笔生硬呆板,单字的上下笔画的缺乏照应关系,转折圆滑无棱角,特别在钩笔、挑笔及绕笔处,不是疾徐轻提、有节奏的环绕连接,而是平滑绕行而成(见图8)。
特征产生的原因:写字机器人的工作原理是机械组件组件沿X轴和Y轴机械运动形成曲线模拟字迹,相对自然人手腕的书写运动,缺乏灵活性。
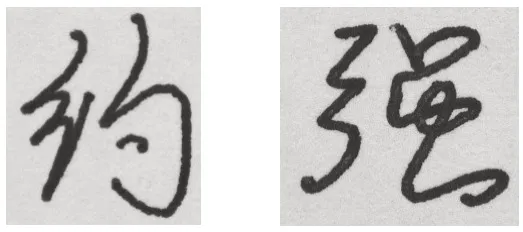
图8 写字机器人书写运笔特征(左为写字机器人1书写,右为写字机器人2书写)
3.3.5 在文检仪白光下观察,两份写字机器人书写的字迹样本的字迹笔画存在较为均匀的抖动弯曲现象,特别是在和组件行进方向呈一定倾斜角度的撇笔和捺笔上弯曲抖动现象更为明显。
特征产生的原因:写字机器人的工作原理是机械组件沿X轴和Y轴运动形成曲线模拟字迹,在和组件行进方向呈一定倾斜角度的撇笔和捺笔上,角度变大,组件运行时和纸张的摩擦力会加大,抖动弯曲现象变得严重。同时这种抖动弯曲现象和写字机器人的性能及结构的稳定性相关,对比两份实验样本材料可见,简单十字形结构的写字机器人1字迹笔画比框架结构的写字机器人2字迹笔画抖动更为明显(见图9)。
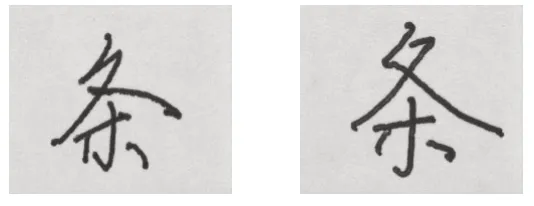
图9 写字机器人书写抖动弯曲特征(左为写字机器人1书写,右为写字机器人2书写)
3.3.6 在文检仪白光下测量检验,两份写字机器人书写的字迹样本的字间距、行间距完全相等。
特征产生的原因:写字机器人是按照预先设置好的行间距和字间距等参数进行书写,一次书写形成的材料上其字间距和行间完全一致。
3.3.7 在文检仪白光下观察,两份字迹样本中相邻两个单字之间没有笔画的连接,字字独立,文字之间缺乏起承转合的节奏感和照应关系(见图10)。
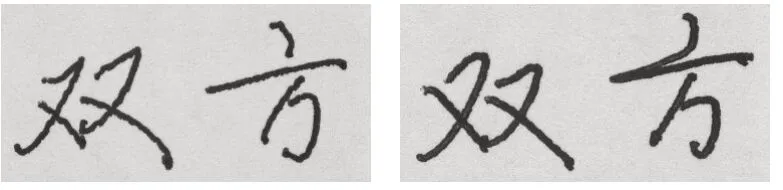
图10 写字机器人书写的字间组合特征(左为写字机器人1书写,下为写字机器人2书写)
3.3.8 在文检仪白光下观察,两份写字机器人书写的字迹样本中重复出现的文字既可以是原样重复完全一致(见图11),也可以通过改变设置让其发生变化,但这种变化和人正常书写的变化不同,略显夸张和刻意(见图12)。
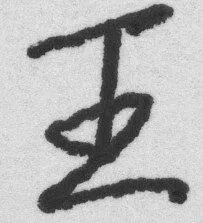
图11 重复出现的文字完全相同(写字机器人1书写)

图12 重复出现文字发生变化(写字机器人2书写)
4 结论
写字机器人书写笔迹是按照系统设置好的参数机械运行形成的,存在笔压均匀、墨色均匀、笔画粗细均匀等不变性特征,而自然人在正常书写过程中会不断调整落笔位置,运笔方向,行笔的距离,运行的角度、弧度、力度和速度,这种书写人在不断调整中产生的变化是自然笔迹的组成部分,书写机器人书写的不变特性属性和自然人书写的变化属性有着本质的区别。结合实验中发现的起收笔顿压痕迹特征、运笔生硬呆板、抖动弯曲等特征可以将写字机器人书写的笔迹和自然人书写的笔迹有效地区别开,得出正确的鉴定结论。
