城市道路平面信号交叉口交通事故成因分析
2020-07-15孟祥海马亿鑫孙佳豪
孟祥海,马亿鑫,孙佳豪
(哈尔滨工业大学交通科学与工程学院,哈尔滨 150090)
0 引言
近年来,城市道路交通安全愈发受到重视,在城市道路系统中,交叉口承担着交通枢纽作用,其中,立体交叉口通过空间上的隔离,减少了不同流向车流之间的冲突,而平面交叉口是机动车、非机动车以及行人混行最为严重的区域,是交通事故的多发地点. 因此对城市道路平面交叉口交通事故成因进行分析,并有针对性地制定预防或减少事故发生的措施有重要的现实意义.
事故成因分析的原理主要有单事件原理、事件链原理、决定因素原理、多事件链原理和多线性事件序列原理等[1]. 多事件链原理认为:只要存在发生事故的途径,事故就有发生的可能性. 多事件链原理虽然源于事件链原理,但它更关注的是各种可能的事故发生途径以及如何提高预测事件发生概率的能力. 显然,当收集到足够数量的、详细到足以描述每起事故发生过程和人员伤害过程的事故数据后,利用多事件链原理即可分析出交通事故的成因链和后果链.
基于多事件链原理的事故分析方法主要有故障树分析法(Fault Tree Analysis FTA)、事件树分析法(Event Tree Analysis ETA)和蝴蝶结分析法(Bow-tie Analysis BTA). 其中,故障树分析法操作简便、易行,因而被广泛应用于各个领域. 孟祥海等[2]通过建立故障树模型,对山区高速公路伤亡事故进行了成因分析;胡艺馨等[3]构建了长大下坡伤亡事故故障树模型,并提出了相应的事故预防措施;由冰玉等[4]在故障树的基础上,结合贝叶斯网对高速公路事故成因进行了深入剖析. 此外,故障树分析法还可与其他方法结合使用,Yao Li等[5]利用生存特征和故障树评估了风力发电机组在不同风况下的系统可靠性水平;张霞等[6]将故障树和模糊层次分析法相结合,对客机巡航过程中发生火灾事故进行了研究;潘俊文[7]在FPSO火灾爆炸风险分析中,利用故障树探究了事件树初始事件及后续事件的发生原因,采用Bow-Tie模型提出了相应的防控措施;Christine等[8]基于模糊集理论和Bow-tie法评估了协作智能交通系统的安全效果.
故障树分析法侧重于事故成因分析,事件树分析法侧重于事故后果分析,而在交通领域将两者联系起来的研究较少. 本文聚焦城市道路平面信号交叉口,基于事故统计数据,先后利用故障树分析法和事件树分析法,探寻导致事故发生的主要因素,并基于主要因素构建产生事故后果的事件树模型,并针对高风险事件链提出相应的控制措施,为城市道路交叉口的安全管控提供参考.
1 数据来源与数据描述
1.1 数据来源
本文数据来源于《华富街道道路交通设施安全风险评估和隐患排查治理服务方案》项目(编号FTHF2019289),收集到了深圳市福田区华富街道辖区内2013-05—2019-08发生的1 955起交通事故数据,按事故发生地点分为路段事故、平面交叉口事故及立体交叉口事故,其中平面交叉口定义为各条道路相交的区域及其进出口道(通常取30 m). 将事故多发的8个平面信号交叉口作为本文的研究对象,即彩田路与福中路交叉口、彩田路与红荔路交叉口、皇岗路与笋岗西路交叉口、皇岗路与红荔路交叉口、皇岗路与振华西路交叉口、华富路与深南中路交叉口、华富路与振华西路交叉口、华富路与红荔路交叉口,共涉及交通事故637起,详细数据包括事故发生的季节、时刻、天气状况、事故地点、事故类型、事故形态、事故严重程度、事故原因、肇事者性别与年龄等.
1.2 数据描述
事故参与者类型包括机动车、非机动车和行人,相对机动车而言,非机动车和行人均为弱势方,为方便起见,本文假定所有非机动车在通过交叉口时均按规定下车推行,即文中的“行人”包含非机动车.
将事故因素分为人的因素、车辆因素、道路因素及环境因素4个方面:1)人的因素:驾驶员年龄、驾驶员不良状态、驾驶员性别、驾驶员不当行为及行人不当行为;2)车辆因素:车辆类型及车辆故障;3)道路因素:交叉口饱和度、施工情况、路面条件及交通标志问题;4)环境因素:照明条件及天气. 交通事故详细数据分类汇总见表1~表4.
2 故障树模型构建及分析
2.1 故障树模型构建
在故障树分析法中,从待研究的顶上事件开始,逐层分析,列出中间事件,直至找出导致事故发生的基本因素,即基本事件. 用事件符号、逻辑门符号和连接线符号等把各种因素之间的因果和逻辑关系描述出来,绘制成树状图[9]. 通过对故障树定量分析,计算概率重要度和临界重要度,找到引起事件发生的重要原因,从而进行有效控制.
基于事故统计数据,以城市道路平面信号交叉口交通事故为顶上事件;以人的因素、车辆因素、道路因素及环境因素为次顶事件,在人的因素方面,将“驾驶员年龄超过55岁”定义为“年老体弱”;在车辆因素方面,由于大型车往往存在机动性差、制动性能差、容易产生视野盲区等不良因素,因此将“大型车”作为一项基本事件;在道路因素方面,将“交叉口饱和度大于0.8”定义为“交通量大”;在环境因素方面,将“夜间照明不良”定义为“照明不足”,构建的城市道路平面信号交叉口交通事故故障树模型见图1. 图中括号内的数字为对应因素的条件概率,即在上层事件发生的条件下,该事件发生的概率.

表1 人员数据
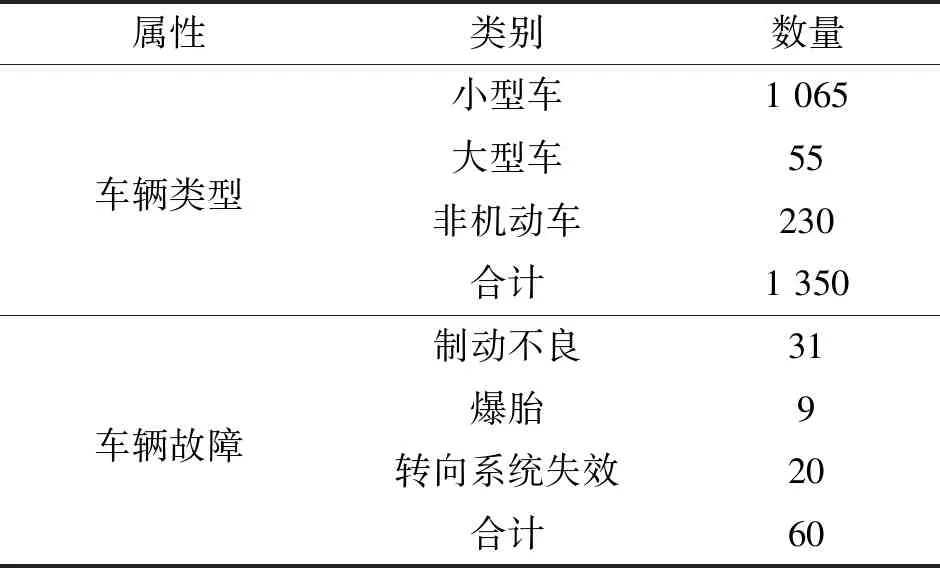
表2 车辆数据
城市道路平面信号交叉口交通事故故障树模型的结构函数为:
φ(X)=X1+X2+(X3+X4+X5+X6)·
(X7+X8+X9+X10+X11+X12)+
X13+X14+X15+X16+X17+X18+X19+
X20+X21+X22+X23
(1)
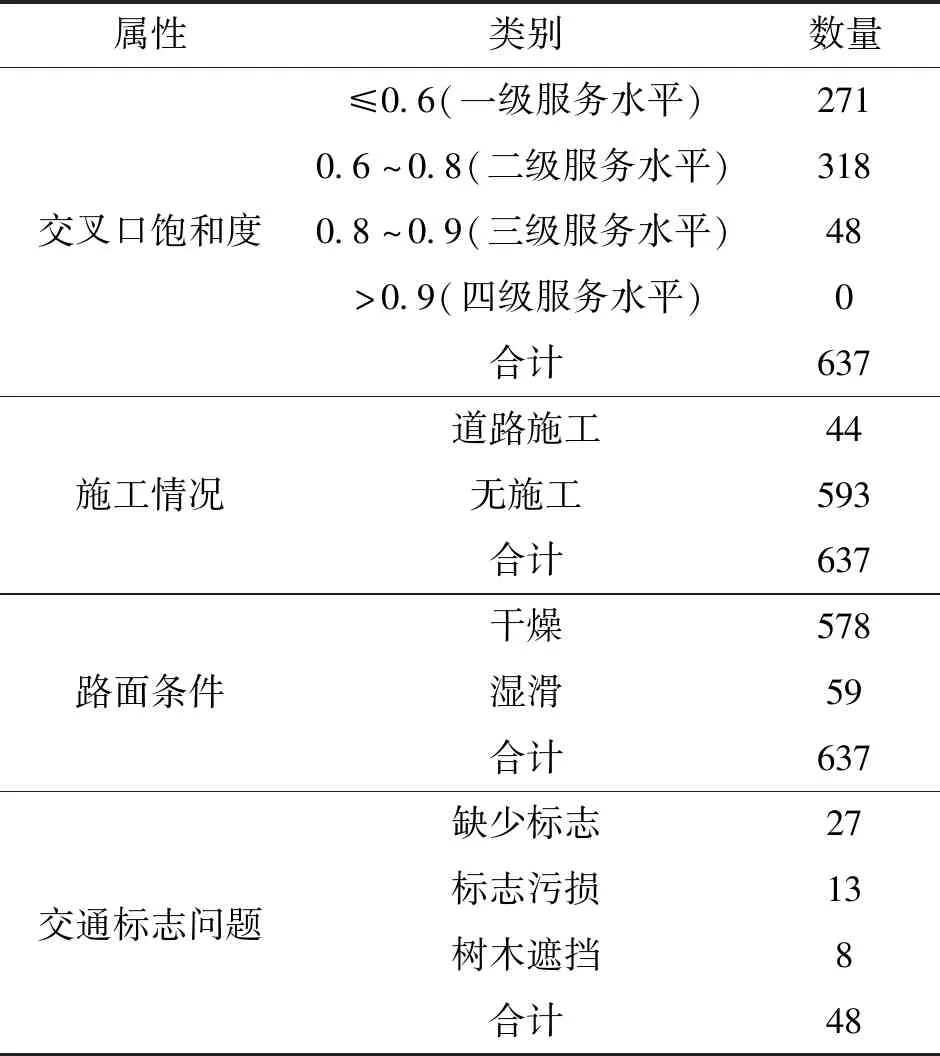
表3 道路数据
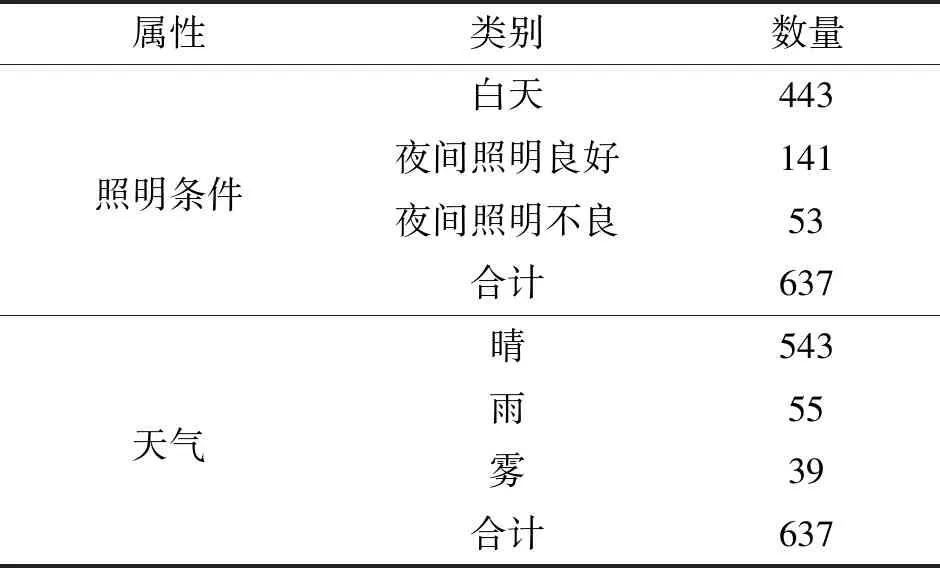
表4 环境数据
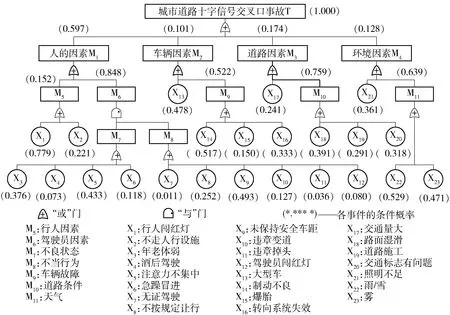
图1 城市道路平面信号交叉口交通事故故障树模型
由图1中的条件概率可知,人的因素、车辆因素、道路因素和环境因素的占比分别为59.7%、10.1%、17.4%和12.8%. 其中,人的因素占比最大,接近60%,对于城市道路平面信号交叉口,行车速度普遍较慢,而交通参与者众多且混行严重,因此交通事故的发生往往是由于人的不良状态或不当行为引起的.
2.2 故障树基本事件的重要度分析
在故障树定量分析中,概率重要度和临界重要度常被用来评估基本事件对顶上事件的影响程度[10]. 其中,概率重要度反映出各个基本事件发生概率的变化对顶上事件发生概率的影响程度,可据此确定降低哪个基本事件概率将使顶上事件发生概率迅速下降;临界重要度在概率重要度的基础上进一步考虑了基本事件对顶上事件的敏感性,表示基本事件概率的变化率引起顶上事件概率的变化率. 因此,本文以临界重要度衡量基本事件对顶上事件的重要程度,如式(2)(3):
(2)
(3)
式中,Ci为事件i的临界重要度,pi为第i个基本事件发生的概率,P(T)为顶上事件发生的概率,Ip(i)为事件i的概率重要度.
根据式(3)计算,各个基本事件的概率重要度见表5.
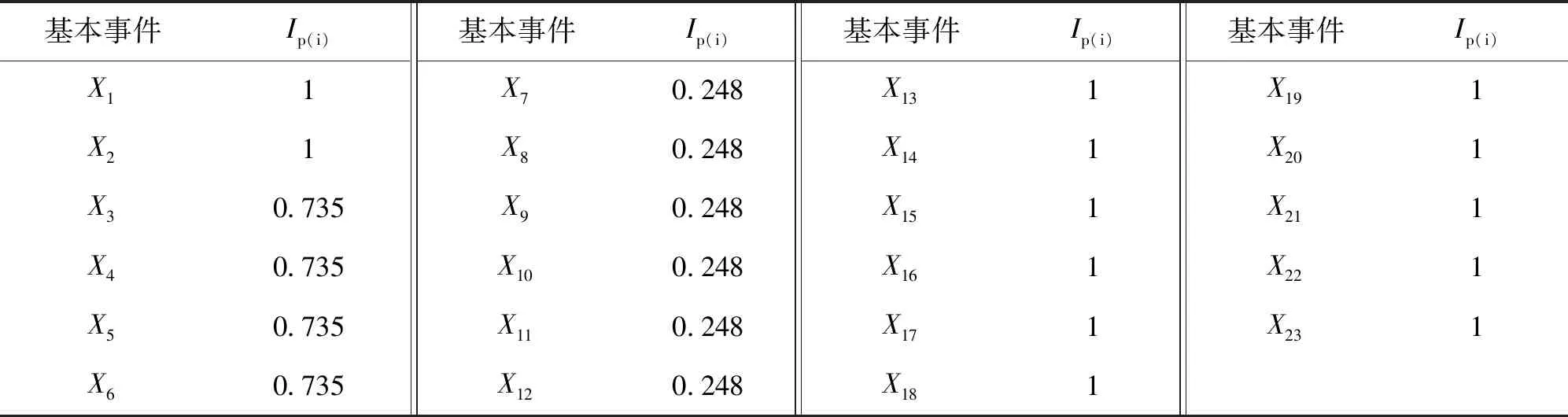
表5 各个基本事件的概率重要度
通过计算,各个基本事件按其临界重要度由大到小排序为:X1>X9>X18>X5>X13>X22>X21>X3>X23>X17>X20>X19>X8>X14>X2>X16>X10>X6>X12>X4>X15>X11>X7. 由此可见,“行人闯红灯”“未保持安全车距”“路面湿滑”“驾驶员注意力不集中”是事故发生的主要原因,即对城市道路平面信号交叉口交通事故的影响程度较大,因此将这4个主要因素进一步进行事件树分析.
3 事件树模型构建及事故风险
3.1 事件树模型构建
事件树分析法起源于决策树分析(简称DTA),是一种归纳推理的演绎方法. 事件树根据事故发生的先后顺序,将事故分成若干个阶段,每个阶段的分析都从成功和失败2种可能后果考虑,最后绘制成近似水平的树形图[11]. 由故障树分析结果可知,“行人闯红灯”和“未保持安全车距”2个因素分别对应于机动车碰撞行人事故及追尾事故,而“路面湿滑”和“驾驶员注意力不集中”是这2种事故形态的共有因素,因此针对这2种事故形态构建事件树模型. 其中,“有前车突然减速”为追尾事故的起始事件,“无前车突然减速”(即车辆正常通过交叉口)为机动车碰撞行人事故的起始事件,构建的城市道路平面信号交叉口交通事故事件树模型共包含9条事件链(A~I),见图2.
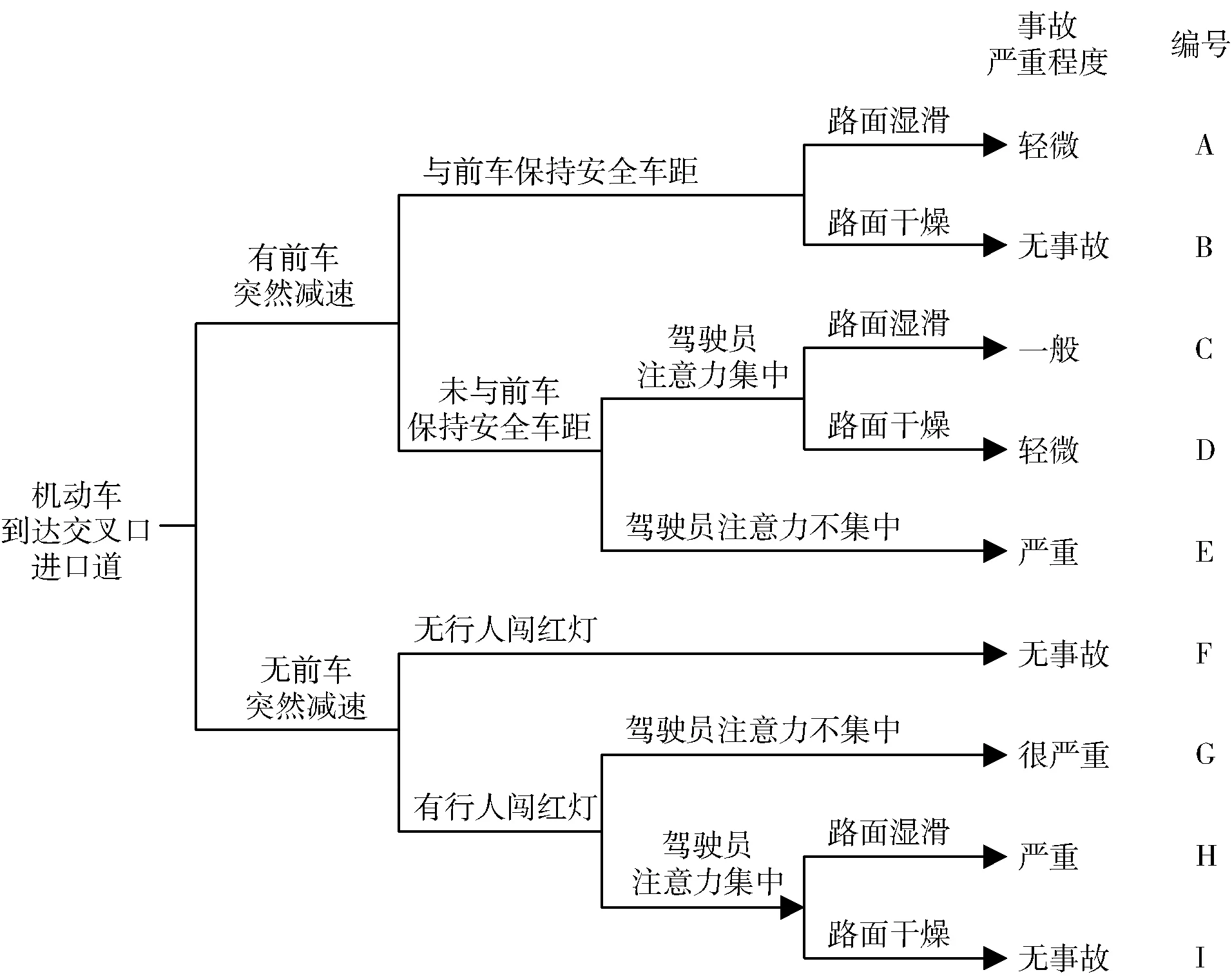
图2 城市道路平面信号交叉口交通事故事件树模型
在事故严重程度划分时,除无事故外,将事故严重程度划分为轻微、一般、严重和很严重4类,对于机动车而言,机动车具有安全带、安全气囊等被动安全措施,因此追尾事故的严重程度范围为轻微—严重,而行人相对于机动车为弱势方,且不具备机动车驾驶员的防护措施,因此机动车碰撞行人事故的严重程度范围为严重—很严重.
3.2 事故风险分析
本文选取“行人闯红灯”“违章变道”“爆胎”作为导致车辆突然减速的因素,将其概率相加得到“有前车突然减速”的概率,为21.04%,结合事件树模型中其他事件的发生概率,计算出各事件链的发生概率,见表6.
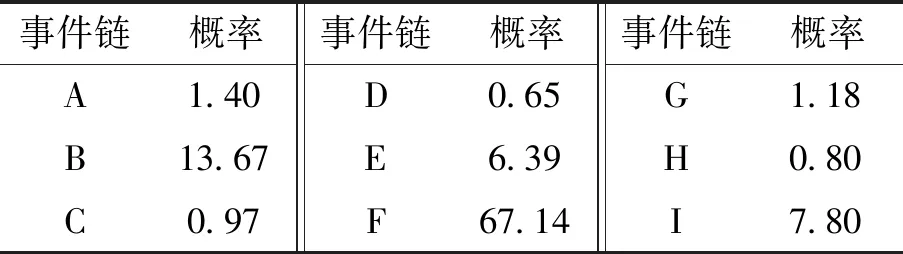
表6 各事件链的发生概率 %
除去无事故发生的事件链(B、F和I),将有事故发生的事件链概率进行归一化处理,计算得到事件链A、C、D、E、G和H的发生概率,分别为12.26%、8.50%、5.73%、56.12%、10.39%和7.00%. 为将事故发生概率及事故严重程度相结合,本文采用风险矩阵方法对这6条事件链进行分析,最终构造出的风险矩阵见图3.
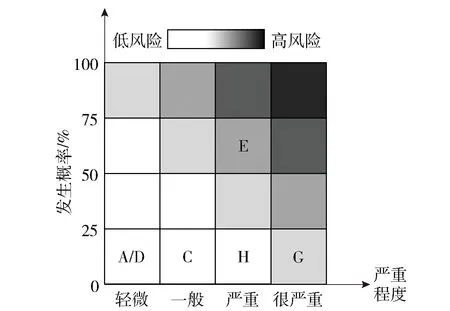
图3 风险矩阵
由风险矩阵确定出中高风险的2条事件链,分别为:有前车突然减速→未保持安全车距→驾驶员注意力不集中、无前车突然减速→有行人闯红灯→驾驶员注意力不集中,且前者的风险略高于后者,因此应将这两条事件链作为重点防控的对象. 同时可看出,在追尾事故中,“未保持安全车距”“驾驶员注意力不集中”是2个影响较大的因素;在机动车碰撞行人事故中,“行人闯红灯”“驾驶员注意力不集中”是2个影响较大的因素.
4 交通事故预防控制措施
通过故障树分析和事件树分析,针对追尾事故及机动车碰撞行人事故中的高风险因素,提出相应的预防控制措施.
1)追尾事故
针对“未保持安全车距”,可在交叉口临近路段上增设车距确认标志与标线,提示并辅助驾驶员确认目前的车距;在车辆上研发并使用智能化的车辆防碰撞系统、先进的预警系统,在未与前车保持安全车距时,对驾驶员进行提醒.
针对“驾驶员注意力不集中”,应减少路段上多余的信息(如广告牌),整改遮挡或污损的标志标线,避免影响驾驶员判断而引发的注意力不集中或操作失误;利用GPS等定位系统,结合地理信息系统(GIS),在车辆将要到达交叉口时进行语音提醒;开发车辆追踪系统,对行驶时间超过4 h未休息的车辆进行警告提醒,减少疲劳驾驶.
此外,还可针对驾驶员开展预防追尾事故的专题教育和培训,主要从以下几个方面入手:不要紧跟空驶的出租车、故障车、“新手”、外地车、车队、大型车及公交车等,不要超速行驶、不要随意变道、掌握点刹车技术等.
2)机动车碰撞行人事故
针对“行人闯红灯”,可在人行横道上安装探测器,当有行人闯红灯时,对行人发出警告,如鸣笛声或爆闪灯;加大对行人闯红灯的处罚力度,加强行人遵守交通规则的宣传教育等. 除对行人采取措施外,还应检查各交叉口的信号配时,使其绿灯时长满足一定的行人通行能力,有条件时可设置二次过街,并且应尽量考虑老年人、残疾人等特殊人群通过的需求.
针对“驾驶员注意力不集中”,除实施追尾事故中对应的措施外,还应加强对驾驶员行为的监管,如机动车通过人行横道时应减速慢行,对不减速行驶、不避让行人的驾驶员进行处罚.
此外,针对机动车或行人交通量较大、路面过宽的交叉口,可建设人行天桥或地下通道对行人进行分流.
5 结论
本文聚焦城市道路平面信号交叉口交通事故,通过构造故障树模型,得到了事故主要影响因素,进而建立事件树模型,计算了各事件链的发生概率,并结合事故严重程度进行了风险分析,最终针对高风险因素提出了相应的预防控制措施. 研究结果表明:
1)在导致交通事故发生的因素中,人的因素、车辆因素、道路因素和环境因素的占比分别为59.7%、10.1%、17.4%和12.8%. 其中,“行人闯红灯”“未保持安全车距”“路面湿滑”“驾驶员注意力不集中”为主要影响因素.
2)追尾事故和机动车碰撞行人事故为城市道路平面信号交叉口交通事故的主要事故形态,针对这2种事故形态建立事件树模型,得到的中高风险事件链分别为:有前车突然减速→未保持安全车距→驾驶员注意力不集中、无前车突然减速→有行人闯红灯→驾驶员注意力不集中,且前者的风险略高于后者,同时表明,相对于“路面湿滑”因素,“驾驶员注意力不集中”对这2种事故形态的发生影响均较大.
3)故障树分析仅从事故发生概率的角度对事故成因进行分析,而事件树进一步考虑了事故严重程度,使事故成因分析更加全面、合理,提出的预防控制措施更具针对性和有效性.
