混合动力推土机再生制动能量回收策略研究
2020-07-15黄亚军姜雨田
黄亚军,姜雨田,王 昌,赵 勇
(1. 山推工程机械股份有限公司,山东 济宁 272073;2. 长安大学 道路施工技术与装备教育部重点实验室,陕西 西安 710064)
近年来,随着推土机需求的持续增高,其高排放、高能耗的缺点对我国的能源和环保提出了巨大挑战[1,2]。同时,随着环境污染与能源紧张问题日趋严重,再生制动能量回收成为工程机械节能的有效解决方法之一。
目前,混合动力技术在乘用车领域已经日渐成熟并且取得了较为显著的效果,制动能量回收作为混合动力和纯电动车辆所特有的能量回收方式受到了广泛的关注[3],这为工程车辆的研究提供了新思路。但是,乘用车和推土机行驶作业特性有巨大的差异。由于推土机施工特点比较复杂,综合工况的恶劣程度一般难以预测,负荷随作业工况波动范围较大、频度较高。另外,推土机作业过程中,除了要驾驶员技术过硬外,也要满足一定的性能要求。因此,应根据工程车辆的特点研究适用于推土机的再生制动能量回收控制策略。本文以推土机为例,采用模糊控制策略,在制动过程中合理分配制动力,使再生制动力能够得到有效回收。
1 制动力分配及能量回收影响因素
1.1 制动力分配规则
制动能量回收系统对制动力进行分配的整体思想是在保证车辆安全行驶和驾驶员良好驾驶体验的前提下尽可能多的对制动能量进行回收。由于混合动力车辆在制动时有纯电机制动、机械制动和机电混合制动3种模式,因此制动力合理分配就很关键。本文采用模糊逻辑控制策略,使再生制动力矩和摩擦制动力矩两者之间得到合理分配,确保两者始终保持最佳比例。
1.2 制动力回收策略
在不考虑超级电容SOC和车速等条件下,制动能量回收系统的制动力大致分配策略为:
(1)当电机所能提供的最大再生制动力大于车辆制动所需求的制动力时,由电机提供车辆进行制动的全部制动力,制动能量回收系统工作在电机制动模式,并对制动能量进行回收。
(2)当车辆制动所需求的制动力大于电机所能提供的最大再生制动力时,制动能量回收系统工作在联合制动模式,采用机械摩擦制动力和电机再生制动力联合制动的模式,只对部分制动能量进行回收。
(3)当驾驶员输入制动强度较大需要进行紧急制动或者超级电容SOC较高时,车辆以机械摩擦方式提供所需制动力实现车辆的制动,不对制动能量进行回收[4]。
1.3 制动能量回收的约束条件
根据制动能量回收主要影响因素和制动能量回收系统设计原则,需要对制动能量回收系统进行以下约束:进行能量回收时的充电电流应小于超级电容的最大充电电流;进行能量回收时的充电功率应小于超级电容的最大充电功率;超级电容SOC应保持在0.2~0.85范围内;制动强度较大时应优先使用机械制动系统[5];车速较高或较低时应优先使用机械制动系统;车辆制动力不能大于地面所能提供的阻力。
2 模糊控制器的设计
本文所设计的控制器是以制动强度Z、车速V及超级电容SOC值为输入量,以制动力分配系数为输出量。通过混合动力推土机整车模型得到制动强度、车速及超级电容SOC的值,选择合适的方法对其进行模糊化处理,对模糊控制器的输出比例因子进行清晰化处理[6]。
2.1 模糊集合与隶属度函数
模糊控制器的输入输出模糊推理如图1所示。由发动机模型可以直接得到车速V的值,由驾驶员模型可以得到制动强度Z的值,由超级电容计算模型可以得到SOC的值。

图1 输入输出模糊推理图
对上述的模糊输入量进行量化处理,可得到车速V的论域为[0,1],0表示车速为零,1表示车速为11km/h,车速输入隶属函数选用高斯型隶属函数表示法;制动强度Z的论域为[0,1],0表示无制动,1表示紧急制动,其输入隶属函数选用三角形函数表达式;超级电容SOC的论域为[0,1],0表示超级电容内电荷量为零,1表示超级电容内达到最大电荷量,其输入隶属函数选用梯形函数表达式;模糊输出量x的论域为[0,1],0表示再生制动力为零,电机不进行制动,1表示车辆所需制动力全部由电机再生制动提供,此时机械制动不工作,其输出隶属函数选用高斯型。
输入变量车速V的取值范围分成5个模糊子集,为{TL,L,M,H,TH},各自表达的含义为“低,较低,中,较高,高”,其隶属函数如图2所示。
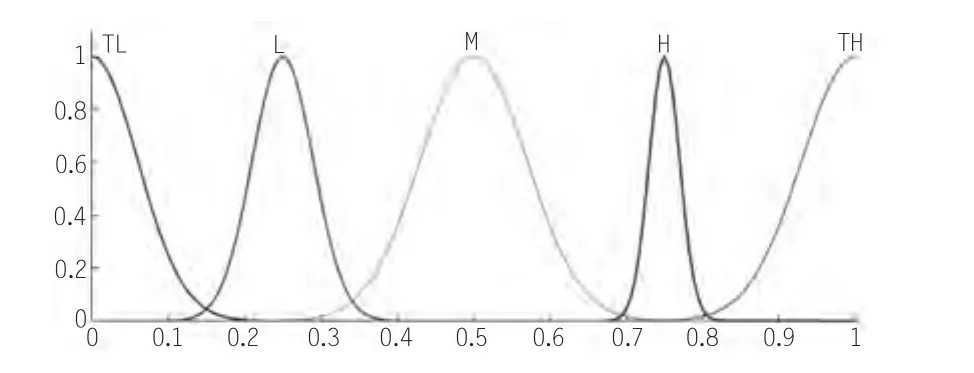
图2 输入变量V隶属函数
输入变量制动强度Z的取值范围分成5个模糊子集,为{VS,S,M,B,VB},各自表达的含义为“非常小,小,中,大,非常大”,其隶属函数如图3所示。
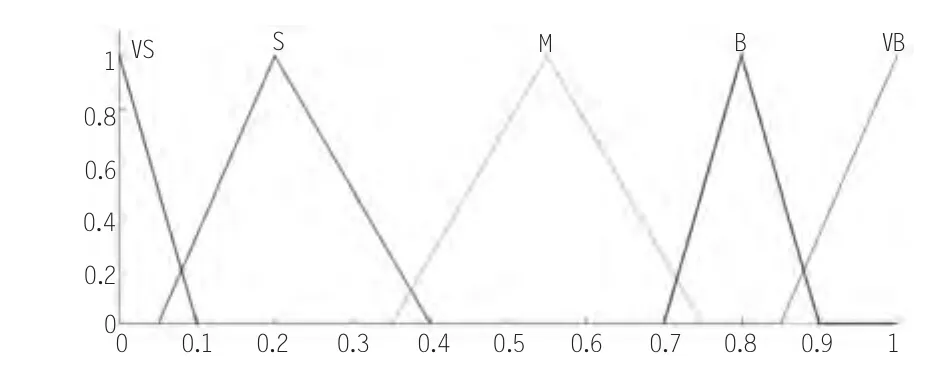
图3 输入变量Z隶属函数
输入变量SOC的取值范围分成3个模糊子集{S,M,B},各自表达的含义为“小,中,大”,其隶属函数如图4所示。
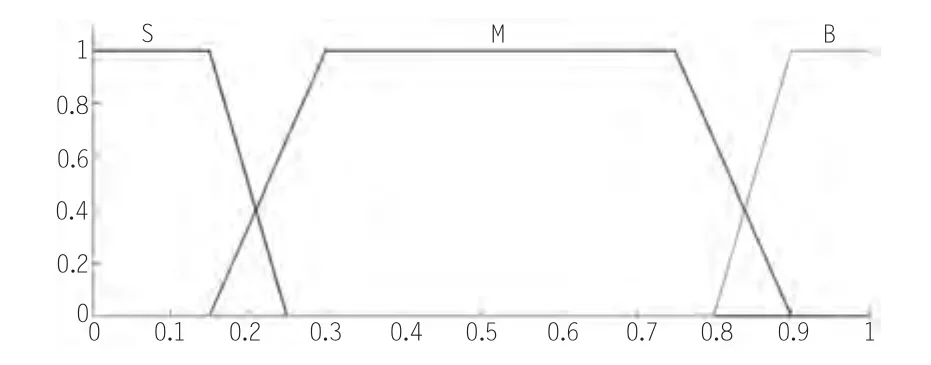
图4 输入变量SOC隶属函数
输出变量x的取值范围分成5个模糊子集,为{VS,S,M,B,VB},各自表达的含义为“非常小,小,中,大,非常大”,其隶属函数如图5所示。

图5 输出变量x隶属函数
2.2 模糊规则库的建立
根据混合动力推土机行驶作业以及制动的特性,以制动安全性和制动能量回收为约束条件,通过对发电机和超级电容工作性能的分析,制定最优的控制规则对制动力作出合理的分配。规则库的建立依据如下:
(1)车速V的大小直接影响车辆制动的安全性以及再生制动能量回收的效率[7]。
(2)制动强度Z的大小和车辆的制动需求以及车辆的制动安全有直接关系[8]。
(3)超级电容SOC是表示超级电容电量的一个重要标准,对再生制动能量的回收具有较大的约束作用。在超级电容SOC值较大时,表示超级电容电量充足。这时为了保护超级电容部件不受损坏,应减小对再生制动能量回收的力度。在SOC值较小时,表示超级电容电量不足,这时为了对超级电容进行充电,可以尽可能对再生制动能量进行回收。因此可以增大车辆总的制动力中电机再生制动力所占的比例,以达到对制动能量充分回收的目的[9]。
按照以上原则,在MATLAB/Simulink软件fuzzy工具箱中编辑逻辑规则知识库。由输入量V、Z、SOC经过模糊规则库的逻辑判断与处理得到输出量x,输出量x可由输出曲面观测窗观察。模糊输出量x的曲面如图6-图8所示。
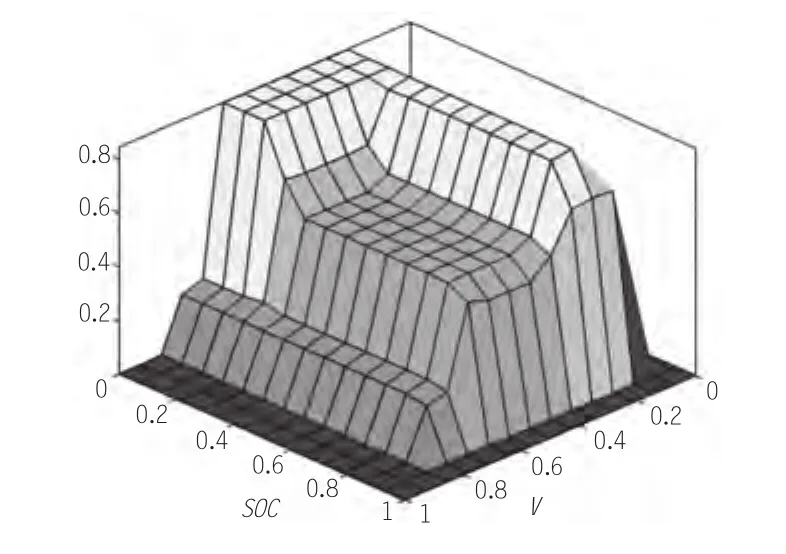
图6 车速、SOC与制动比例的关系
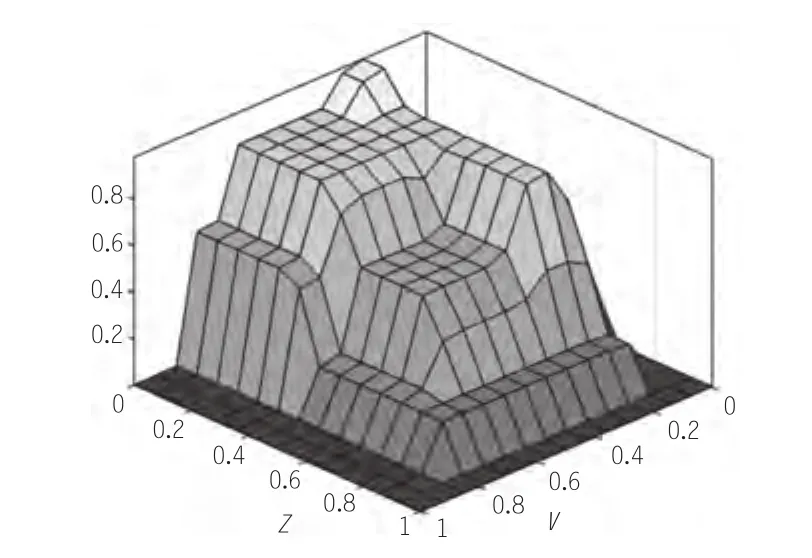
图7 车速、制动强度与制动比例的关系
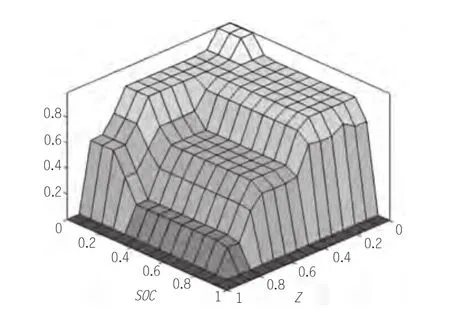
图8 制动强度、SOC与制动比例的关系
由上述观测窗口可以对设计的模糊控制规则进行观察与调试,同时可以根据仿真结果对模糊控制规则进行相应的调整,得到最优的模糊控制规则。
2.3 模糊控制模型
以串联混合动力仿真平台为基础,根据上述分析与设计,建立基于模糊控制的制动能量回收模型,如图9所示。

图9 模糊控制策略仿真模型
3 系统建模
3.1 驱动电机模型
本文选用上海大郡动力控制技术有限公司0110WB型105kW电机。电机输出转矩表达式如下

式中T1(t)为电机动态输出转矩,N·m;Treq为电机目标转矩,N·m;n为电机转速,r/min;Tdmax(n)为转速为n时最大驱动转矩,N·m;Tbmax(n)为转速为n时最大制动转矩,N·m;τ为响应时间,s;S为拉氏变换量。
3.2 超级电容模型
对超级电容建模时忽略温度的影响,并将其等效为一个理想的超级电容C与一个大阻值的电阻Rmax并联,再与一个较小阻值的电阻Rmin串联[10]。其等效电路如图10所示。
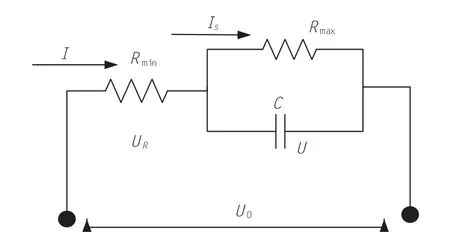
图10 超级电容等效电路模型
超级电容充电时其电流I与功率P取负值,放电时取正值。由基尔霍夫电压定律可得超级电容的输出电压


式中SOC为超级电容荷电状态;Umin为超级电容最小工作电压,V;Umax为超级电容最大工作电压,V;Ur为超级电容实时电压,V。
超级电容输入输出能量

式中E为超级电容最大存储能量。
为了保证超级电容的工作寿命及充放电效率,在实际充放电过程中将其充放电电压限制在一个工作区间内,进而设置超级电容SOC值大小为[0.2,0.85]。
3.3 制动力分配模型
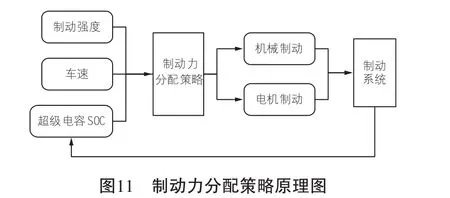
制动能量回收系统对制动力进行分配的整体思想是在保证车辆安全行驶和驾驶员良好驾驶体验的前提下尽可能多的对制动能量进行回收。以制动强度、车速和超级电容SOC作为控制器的输入,根据三者之间参数的大小以及控制器中的规则,输出代表电机制动力在总需求制动力中所占比例的再生制动系数X。制动能量回收系统制动力分配策略原理如图11所示。
3.4 动力学模型
根据推土机的行驶作业工况,由推土机行驶作业理论可得推土机的动力学数学模型
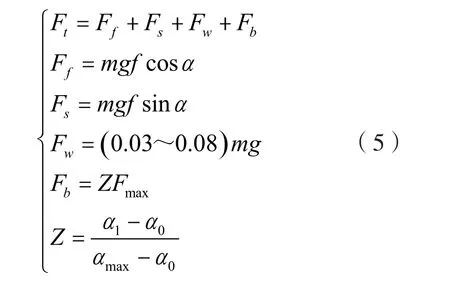
式中Ff为滚动阻力,N;m为整车质量,kg;g为重力加速度;f为滚动阻力系数;α为路面的坡度,°;Fb为车辆制动力,N;Fmax为最大制动力,N;Z为制动强度;α1为制动踏板角位移,°;α0为制动踏板自由行程角位移,°;αmax为制动踏板最大角位移,°。
4 仿真分析
根据推土机各机构间的输入输出关系,基于MATLAB/Simulink平台建立如图12所示的混合动力推土机制动能量回收整车仿真模型。其主要仿真参数:选择串联型混合动力推土机,车质量为28000kg,超级电容容量C=3F,发电机功率为180kW,驱动电机功率为105kW,最高车速为11km/h,超级电容SOC最佳范围[0.25,0.85],SOC初始值为0.5。
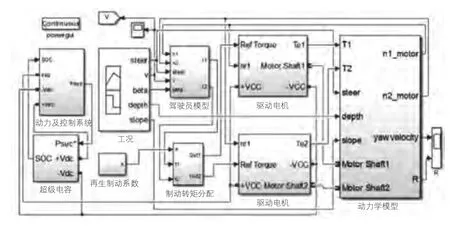
图12 混合动力推土机制动能量回收整车仿真模型
为了验证推土机制动能量回收系统在不同制动条件下的工作性能,依据GB/T 35213-2017及GB/T 19929-2014履带推土机技术条件与性能的要求,建立高速(11km/h)条件下的紧急制动(制动踏板位移50°)、中度制动(制动踏板位移30°)和轻度制动(制动踏板位移10°);中速(7km/h)条件下的紧急制动、中度制动和轻度制动;低速(4km/h)条件下的紧急制动、中度制动和轻度制动的90s综合工况,如图13所示。图14和图15分别为超级电容SOC曲线图和制动力做功及回收能量曲线图。
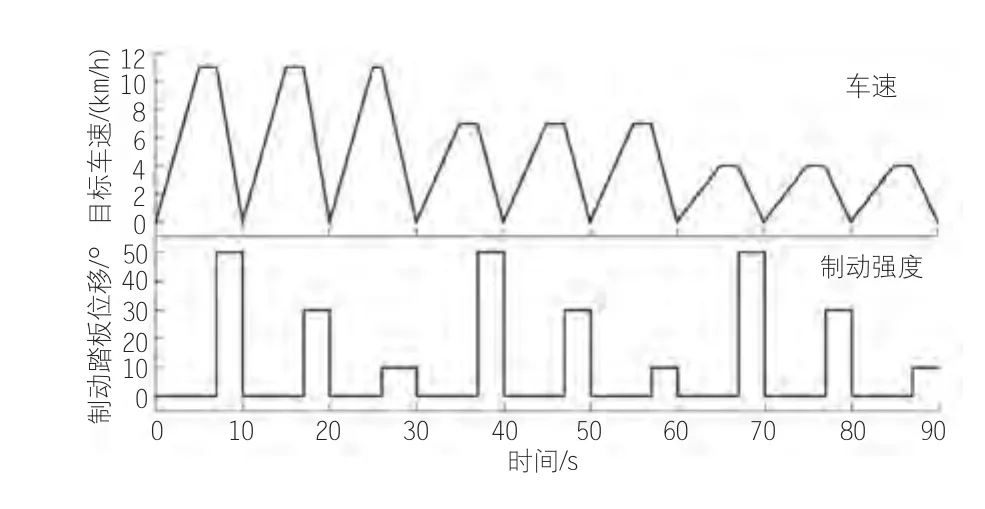
图13 综合仿真工况

图14 超级电容SOC曲线图

图15 制动力做功及回收能量曲线图
由图14可以看出,当推土机加速需求时需求功率较大,超级电容提供能量,超级电容SOC减小;当对制动能量进行回收时,超级电容SOC增大,最终超级电容SOC由0.5增大到0.7左右,说明再生制动系统对制动能量进行回收并储存在超级电容内。由图15可以看出,推土机提供的总制动力做功为599kJ,其中电机提供制动力做功为231kJ,超级电容回收能量为144kJ,因此基于模糊规则的再生制动能量回收控制策略,可以回收24%的再生制动能量。由以上仿真分析可以看出,所给出的模糊控制策略可以有效地回收再生制动能量。
5 结束语
本文对串联混合动力推土机各部件及制动力分配进行了分析,由台架试验数据建立了各部件仿真模型,提出以模糊控制能量回收策略对混合动力推土机进行再生制动能量回收。通过仿真,本文所给出的模糊控制策略能有效合理的分配制动力,有效回收再生制动能量144kJ,制动回收率为24%。下一步工作计划通过实际样机进行实验来对本模糊控制策略进行验证。
