小型甜菜收获机的研制
2020-07-15德州学院机电工程学院周正飞李彩霞李士平孙瑞吉
德州学院机电工程学院 周正飞 李彩霞 李士平 孙瑞吉
我国农业机械日益发展且对农业质量追求不断提高,农业可以说是一个国家发展与建设的基础。我国是甜菜生产大国,甜菜产业在我国北方农业、糖业发展以及增加农民收入等方面作用极大,其因含糖量高、产量高的特点在我国的种植范围不断增大。我国在甜菜收获机械设备制造方面发展程度低,自动化程度低,产品质量低,收获流程单一且成套性差,总体达不到需求水平,甜菜生产机械化的问题难以解决,甜菜收获机械化成为阻碍我国农业发展的因素。
针对上述情况,设计了一款集合甜菜的除叶、修整、杀秧、起拔、收集于一体的小型甜菜收获机,保证了甜菜收获质量,降低了甜菜的收获成本,大幅度节省了劳动力成本,提高了作业效率。
1 总体结构方案设计
小型甜菜收获机的总体结构图如图1所示,该机主要由前置杀秧机、控制舱、发动机、前箱体、输送链挡板、后储存箱、后轮转向系统、输送链、盘形起拔器、抖动刀、前轮等组成。操作平台位于车顶,能按照操作过程的要求单独控制整个工作流程。实现了除叶、甜菜起拔、甜菜收获等功能,解决了操作过程工人多、步骤复杂、收获甜菜慢的问题。甜菜收获机采用大前轮驱动和小后轮转向的技术,每垄甜菜收获完后,推动操纵手杆,将前置打秧机从地面抬起迅速改变方向,转弯半径小,灵敏方便,适合丘陵小块地段和甜菜育种小区。

图1 小型甜菜收获机的总体结构图
2 工作方案设计
小型甜菜收获机的作业性能受作业对象、作业环境、秧叶处理方式等的影响。各地甜菜种植区的自然条件不同,播种期也不同。以不同地区种植环境、土壤性质的差异为依据设计了此款小型甜菜收获机,本款小型甜菜收获机分为三大工作部分。
2.1 前置杀秧机
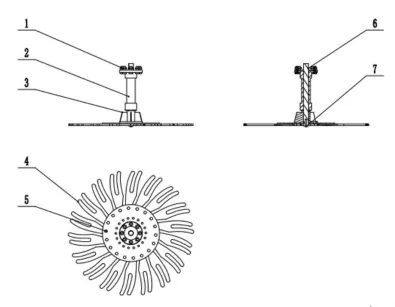
图2 前置杀秧机
前置杀秧机连接于小型甜菜收获机控制舱前面臂体机构的下端,其前置杀秧机的后部连接有液压杆,可以推动前置杀秧机,完成上升下降运动。前置杀秧机主要包括杀秧机外壳、变速器、杀秧排出装置及螺旋轴等部件。优化后的前置杀秧机的结构如图2所示。
2.2 盘形起拔器
盘形起拔器是甜菜收获机的关键部位,主要由旋转主轴和旋转刀等组成,其结构如图3所示。为了防止起拔的遗漏甜菜,增加了旋转刀片的厚度,将一把旋转刀分成两个长度有一定距离间隔的旋转刀,并且在旋转输出轴的连接部位设计高度调节装置,让起拔器充分适应不同的地面质量、不同品种及不同大小的甜菜。优化后的盘形起拔器结构如图3所示。
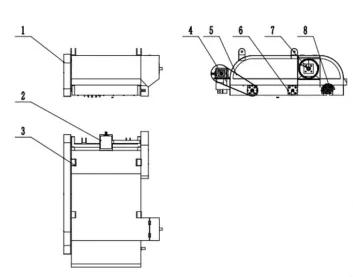
图3 盘形起拔器
2.3 盘形爪式输送机构
当底部盘形转动时将松动过的甜菜输送进传送带内,传送带将甜菜放于后储箱内,盘形爪式输送机构是一种能够间歇性地输送甜菜,并且能使甜菜间距保持一致步长的传送机构。甜菜经过隔断板从料轮滑到辊道上,隔断板做间歇往复直线运动,甜菜经过一定的时间间隔向后下滑落。在工作过程中,输送滑架做往复线性运动,其上处于最左端的推爪推动起始点位置的甜菜向前运动一个步长,当滑架返回时,起始点处又从料轮位置收到一个新甜菜。推爪下装有压力弹簧,当推爪返回时,从甜菜底面滑过,而甜菜保持不动。当滑架再次向前推进时,该推爪已复位并推动新甜菜前移,在此期间,该推爪与前面的推爪一起推动位于前工位的甜菜,向前再运动一个步长。循环运行,完成甜菜的按步推进式运输。显然,隔断板的插断运动必须与甜菜的移动协调,在时间和空间上相匹配。各部分分工合作,前后相接完成一个完整的收获过程。
2.4 齿形抖动刀
齿形抖动刀运动方式是通过前后抖动将土中的甜菜松动拔出。该机构可以根据甜菜垄宽的大小,适时调节机器作业的宽度大小(通过调节地轮和地轮轴安装的位置),根据不同地区甜菜垄高的不同,调节机器离地面的高度,保持刀轴上齿形抖动刀片的工作形状与甜菜垄的形状一致,确保前置杀秧机运作的稳定性和粉碎质量。
3 结语
小型甜菜收获机设计合理、构思新颖、操作灵活、秧叶粉碎效果好,解决了甜菜机械收获过程中茎秧缠绕在机器工作部件的问题,降低了功耗,节省了劳动力,提高了作业效率。秧叶机械粉碎后,留在地里的茎和秧叶可以提高土壤肥力,还可避免压伤秧及甜菜,避免化学除秧对环境带来的污染。此外,还可应用于甜菜的挖掘、去土、削顶、修剪和条形堆积联合作业,确保甜菜的收获质量。小型甜菜收获机以实用化和多样化为目标,系统综合性能优良、可靠性高,能够满足农场目前实际需求,具有广阔的发展前景。
