井下皮带输送机PLC控制应用
2020-07-14杨顺利
杨顺利
(郑煤集团郑新公司,河南 郑州 450000)
0 引言
皮带输送机是被广泛应用于井下煤炭和矸石的转运。鉴于矿井下条件的复杂化和多变化,多台皮带输送机实现集中智能化控制一直是矿井的研究重点[1-2]。因此,决定将PLC控制引入到皮带输送机控制中,同时实现皮带运输状态的实时监控,现以由4台皮带输送机组成的煤炭运输系统为研究对象进行皮带输送机PLC控制实践研究。
1 皮带运输系统设计
研究对象为由4部皮带输送机组成的煤炭运输系统。为了确保运输系统可靠性和安全性,运输系统配备有自动控制和手动控制两种控制方法,这两种控制可通过切换开关实现,所有的操作均布置在主控室内,操作人员可通过控制液晶显示屏观测和掌握各设备和运输系统的运行状态。4部皮带输送机组成的运输系统采用PLC控制,设备运行状态的监控由工业控制计算机来实现。为了实现运输系统的可靠性、安全性和高效性,系统控制功能设计如下。
1) 为了实现煤炭顺序运输,避免煤炭在皮带上堆积,运输系统启动时依照PD4(M4) →PD3(M3) →PD2(M2) →PD1(M1) 的次序逆煤炭运输方向启动,各皮带输送机电机启动时间可根据需要启动间隔时间确定,研究中设定时间间隔为15 s;关闭系统时按照PD1 (M1) →PD2(M2) →PD3(M3) →PD4(M4) 的次序顺煤炭运输方向启动,各皮带输送机电机停止间隔时间根据现场需要确定,研究中设定时间间隔为30 s,这样可尽量减少皮带上的物料。
2) 当运输系统中某台皮带输送机出现问题时,前方皮带输送机和该问题皮带输送机能够自动停车,后续皮带输送机不受影响,待输送完煤炭后自动停止运行。如,当PD2 (M2) 发生故障,PD1 (M1) 和PD2 (M2) 立即停车,PD3(M3) 和PD4(M4) 按照设定的时间间隔停车,即经30 s后PD3(M3) 停车,再过30 s后,PD4(M4) 停车。
3) 为了确保运输系统的安全性,避免因非可预料因素导致的皮带输送机故障,将急停控制装置引入到运输系统中,即如需紧急停车,可实现4部皮带同时无条件停车。
4) 为了提高运输系统的运输效率,将皮带传动速度设定为可调,该研究中将皮带输送机调速控制设计为分级调速和无极调速2种控制。
5) 通过监控系统实时掌握皮带输送机的运行状态,各类报警装置发挥各自功能,确保皮带输送机稳定可靠运行。
2 皮带输送机PLC控制设计
2.1 PLC控制器
皮带输送机控制以往多采用继电器控制,继电器控制采用硬件连线方式实现,是利用机械触点的并联或串联和延时来实现控制逻辑,工作频率相对较低,定时精度不高,易受环境影响,且只能完成既定的逻辑控制。PLC控制可根据需要重新编写程序,又称软连线;PLC指令依靠半导体电路实现控制,速度高、精度高、调整时间方便,受外部环境影响较小。另外,PLC功能集成化程度高,可实现顺序控制、传动控制、过程应用等,适宜复杂程序的控制。考虑到该实践研究的目的,同时为了降低资金投入和确保安全,采用欧姆龙公司生产的CPM2A系列可编程控制器。
2.2 PLC控制系统结构
在该研究对象中,工业控制计算机作为上位机与皮带输送机PLC控制器进行通讯联络,对各皮带输送机运行状态进行实时采样,如掌握皮带跑偏信号、电机温度信号、烟雾信号、皮带堆煤信号等,并在液晶显示屏上以文字或者数字的形式显示,且当监测所得数据超过规定值时会发出警报,如皮带跑偏超过15°时发出皮带跑偏警报,当温度、烟雾等出现异常时也会发出相应的报警,达到设定上限值时自动强制停车。为方便皮带输送机调速,试验中设计了分级调速和无极调速两种调速方式,前者是在一定频率范围内根据需要选择几个均匀速度作为分级调速输出频率,后者是在相应频率范围内对变频器进行无极调速。
2.3 PLC控制程序设计
PLC 控制程序具体见图1所示。在PLC 控制器加电时,初始化子程序开始执行命令。分级调速程序和无级调速程序控制皮带输送机调速,分级调速频率范围设定为0~60 Hz,选取相对均匀的频率作为输出频率,分别为6.4 Hz、12.5 Hz、5.6 Hz和51.4 Hz,通过分级调速实现皮带输送机四级调速,且设定四级调速按钮分别互锁,只允许一个速度位存在,避免各梯级出现冲突现象;通过设定0~60 Hz频率范围内变频器输出频率设计无级调速,其中频率f=a×x (0≤x≤16,x∈Z;a 取经验值3.2),这样即可通过改变x 值来实现皮带输送机的无级调速。联锁启停控制程序实现皮带输送机的联锁启动和停车,并可根据突发情况实施部分或者全部皮带输送机停车。
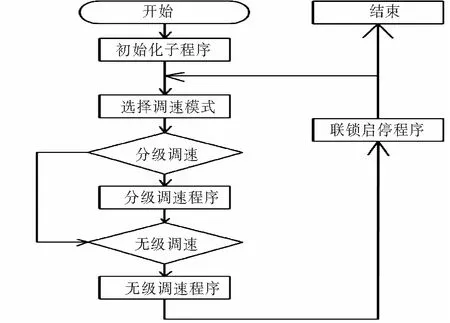
图1 PLC控制程序控制流程
3 PLC控制系统抗干扰措施
PLC控制系统具有性能可靠、功能强、抗干扰能力强等优点,但在强电场、强磁场等高频干扰下,PLC控制器也会出现控制精度降低、内部数据丢失等现象。分析认为,PLC控制系统干扰源主要有电源线引入干扰、信号线引入干扰和接地系统干扰等,电源线和信号线可能引起电流场和电磁场紊乱,接地系统紊乱会造成接地点电位不均匀,引起地环电流,这些都易影响PLC控制。鉴于此,可采取影响措施来提高PLC控制系统抗干扰能力。
1)采用专用电源,将电源与其他设备电源分开,避免其他大型设备启停对供电电源影响;采用隔离变压器将控制电源与PLC隔离,同时在隔离变压器和PLC间增加滤波器,尽量避免干扰信号对PLC控制的影响。
2) 在交流信号输入端并联压敏电阻,在直流信号输入端并联续流二极管。在直流信号输出端接压敏电阻,交流信号输出端接压敏电阻,晶体管及晶闸管输出端接旁路电阻保护。
3) PLC 控制系统应采用直接一点接地方式,同时为了减少地环流的干扰,要求接地电缆截面积不小于2 mm2,接地电阻不超过100 Ω,且接地线要求使用专用地线。
4 结语
煤矿井下皮带输送机正常运行是确保生产稳定的重要基础,而皮带输送机当前多采用人工控制,费时费力,且运行稳定性和可靠性难以得到保证。PLC控制作为现代最先进的控制手段,将其运用到井下皮带运输系统中可大幅度提高运输系统的自动化水平,实现运输系统的状态实时监控,同时可通过编程改变PLC控制参数和增减控制功能模块来提高PLC控制效果。PLC控制是井下皮带集中控制的发展方向。
