基于电子皮肤的机器人运动感知算法研究
2020-07-13陈楚浩代稷珅
陈楚浩,谢 瑜,代稷珅
(厦门大学航空航天学院,福建厦门 361102)
0 引言
近年来,机器人的工作从基本的机械搬运、简单协助发展到了需要和环境、人及其他机器人密切交互的一系列复杂任务。而传统机器人由于在线感知能力匮乏,使其在非结构环境下缺乏自主能力,无法与动态的目标进行有效交互[1-3]。因此需要为机器人开发运动感知系统,使机器人能够高度适应非结构化的动态环境,精确完成复杂任务,满足高端制造、医疗康复和国防安全等领域对先进机器人的需求[4-8]。目前机器人主要依靠视觉感知目标运动[9-12],但视觉传感技术对机器人的工作环境提出了较高的要求,在光线不足、黑暗、沙尘等条件下,视觉数据将产生较大误差,影响感知结果。触觉作为机器人的一种重要的传感技术,可以通过接触感知交互目标的形状、硬度、质地等物理性质,检测滑动、振动等机械刺激[13-16]。因此,在极端环境下使用机器人触觉代替视觉感知目标运动具有重要的研究意义。
自21世纪以来,电子皮肤作为一种新型高密度触觉传感器得到了迅猛发展[17-19]。电子皮肤凭借其轻薄、柔顺的优势,可以大面积地集成在机器人表面,有效增大了机器人的感知面积。此外,和只能感知单点力的传统力传感器相比,具有传感器阵列的电子皮肤能以触觉图像的形式显示面接触力分布,追踪接触目标的位置和姿态,是机器人实现运动感知的理想触觉传感器[20-22]。因此,利用电子皮肤采集的触觉图像,设计基于图像处理的运动感知算法,具有理论和实践上的可行性。
本研究基于电子皮肤和触觉图像处理技术提出了对接触目标运动感知的算法。该算法首先使用柔性基底改善电子皮肤与目标的接触,并对触觉图像进行预处理,使用图像形态学技术消除触觉图像中的噪声点以减小误差,接着对触觉图像进行双线性插值以增强分辨率。改善触觉图像后,通过计算触觉图像的形心获取目标的位置变化,感知目标平移,接着利用对数极坐标变换,对触觉图像进行最优旋转配准以获取目标姿态变化,实现对旋转运动的高效感知。最后利用线性回归模型拟合不同时刻下目标的位置和姿态变化,计算目标的运动速度。此外,本研究使用高精度并联定位平台实验验证了算法精度,分析了算法误差产生的原因。
1 触觉图像改善
当运动目标与机器人接触时,电子皮肤的高密度力传感阵列能够连续采集运动目标的触觉图像,以传感器阵列为基准建立触觉坐标系分析触觉图像,可以计算目标在不同时刻下的位置和姿态,进而获取目标的运动速度,最终实现运动感知。但当目标物体质地粗糙或硬度较高时,电子皮肤无法与目标充分接触,导致不同时刻的触觉图像变化很大,此外,当外部干扰强烈时,触觉图像会产生较多的噪声点,这些现象都会影响算法精度,因此需要改善触觉图像。
1.1 柔性基底对接触的改善
1.1.1 电子皮肤结构
本研究选择了一款高密度的商用压力传感器阵列(5101,Tekscan,美国)作为电子皮肤,该传感器阵列由44行和44列的压力传感器呈矩形排列而成,行列间距均为2.5 mm,整体厚度为0.08 mm。整个电子皮肤由2块聚酯薄片拼接而成,2块聚酯薄片的内侧面分别以行模式和列模式沉积着导电电极,力敏感材料也以行列分布的形式被安装在两块薄片之间,这些电极和力敏感材料行列的交叉形成了一个触觉传感单元,如图1所示。数据采集电路(Evolution Handle,Tekscan,美国)和配套软件可以自动将传感单元采集到的力数据转化为一个8位的像素强度值,并组成一张显示接触力分布的压力云图。

图1 电子皮肤的结构
1.1.2 柔性基底选择
本研究通过在电子皮肤下放置一块柔性基底以解决与目标接触不充分的问题。为了最大程度上改善接触,需要为基底选择合适的弹性模量和厚度,因此选择了厚度范围在0.5~2.0 mm内,间隔为0.5 mm的4种硅胶板(silicone rubber sheet,SRS)和厚度范围在1.0~6.0 mm,间隔为1.0 mm的6种发泡硅胶板(foamed silicone rubber sheet,FSRS)进行实验。与硅胶板相比,发泡硅胶板在制造中多了发泡工序,材料呈开孔结构,因此弹性模量更小。在实验中,基底被放置在电子皮肤之下,并将0.5、1.0、1.5、2.0、2.5 kg的砝码按顺序放置在硬质粗糙工件上作为负载,观察不同基底对接触的改善,如图2所示。
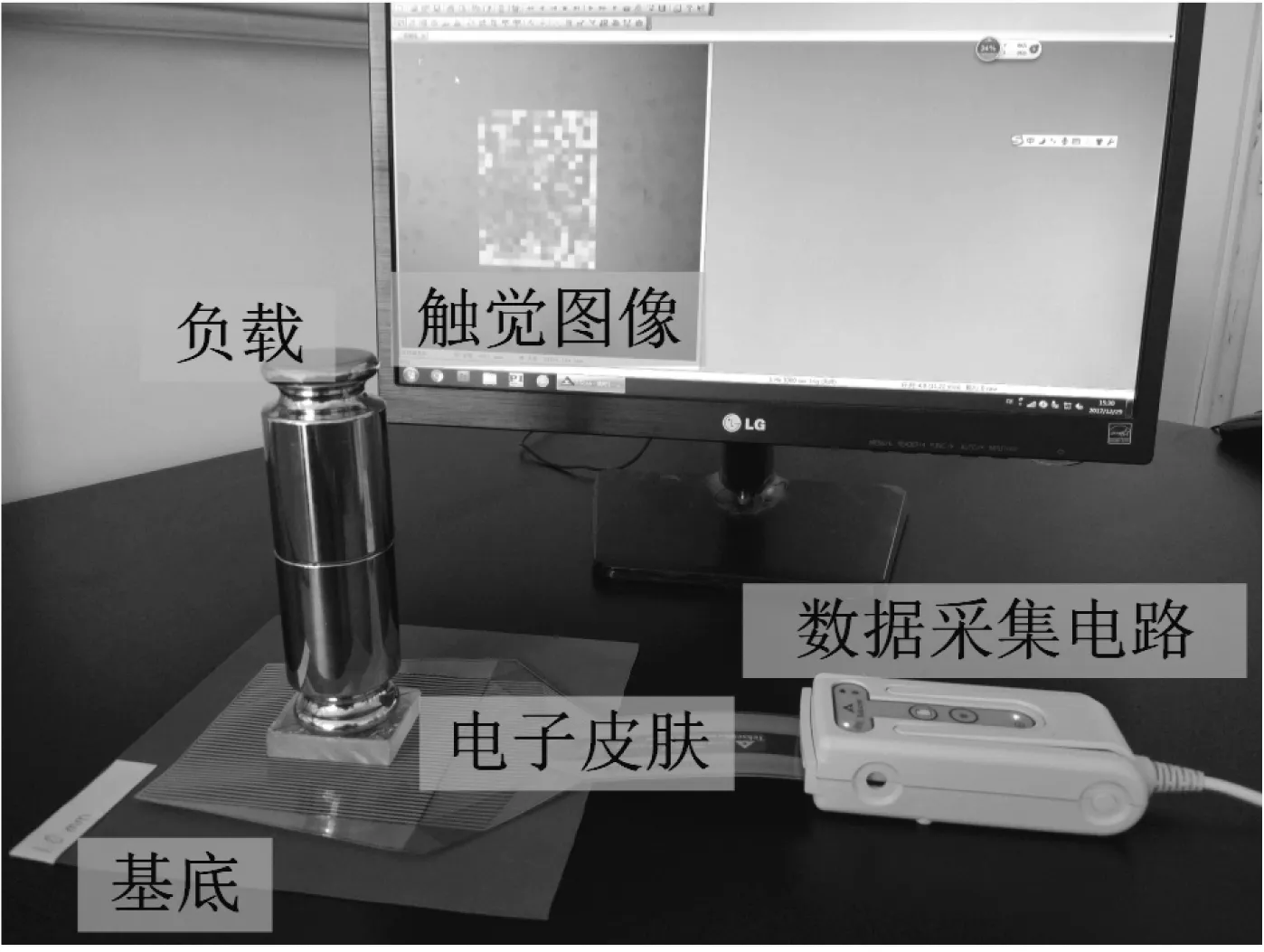
图2 电子皮肤的结构
为了定量比较基底对接触的改善,本研究使用触觉图像面积与目标接触面的实际面积之比来描述接触情况,它的定义如下:
(1)
式中:St为触觉图像面积;So为目标接触面面积。
由定义可得:接触比R越接近1,电子皮肤与目标的接触越充分。在实验中,使用不同基底的电子皮肤采集触觉图像的接触比如图3所示,观察发现,不使用基底时,接触比R非常小,表明电子皮肤与目标未充分接触。而硅胶板(SRS)和发泡硅胶板(FSRS)均能提高接触比R,改善接触。此外,在相同压力下弹性模量小的发泡硅胶板改善效果更好,且改善效果在厚度达到1 mm后不再明显改变。因此,本研究使用1 mm厚的发泡硅胶板作为基底来改善电子皮肤与接触目标的接触。

(a)

(b)图3 不同基底的接触比
1.2 触觉图像预处理
为了提高算法的准确性,需要对采集到的触觉图像进行预处理。首先,本算法依次使用了图像形态学中的腐蚀和膨胀技术消除触觉图像中的噪声点。该技术利用3×3的核遍历触觉图像,其中腐蚀操作会把核中心点的强度值替换成核覆盖区域内的最小强度值,而膨胀操作则会替换成区域内的最大强度值,其公式表达如下:

(2)

(3)
由于电子皮肤传感器阵列的间距是2.5 mm,所以使用触觉图像感知平移的最小分辨率仅为2.5 mm,这会影响算法的分辨率。为解决此问题,本文采用了5倍双线性插值对触觉图像进行缩放。在双线性插值中,已知上下左右相邻的4个点为Q11=(x1,y1)、Q12=(x1,y2)、Q21=(x2,y1)和Q22=(x2,y2)以及4个点对应的像素强度值,如图4所示。

图4 双线性插值
为了得到触觉图像I插值后在P=(x,y)点的强度值,可以先在x方向为点R1=(x,y1)和R2=(x,y2)进行插值,公式如下:
(4)
(5)
然后在y方向为P点插值,公式如下:
(6)
对原始触觉图像进行腐蚀膨胀处理和双线性插值的结果如图5所示。新触觉图像在消除噪声点的同时改善了分辨率,因此可以显著提高算法的精度。
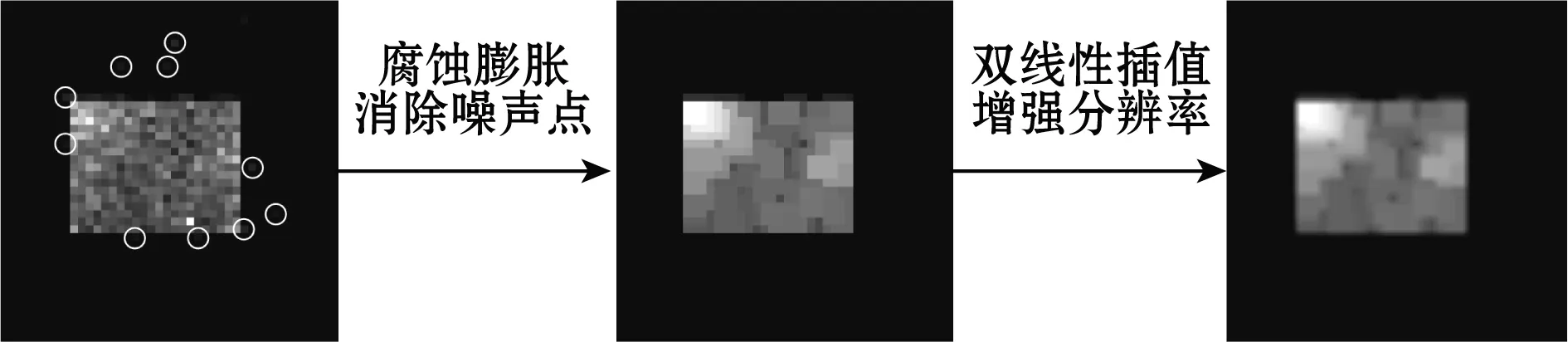
图5 触觉图像预处理
2 运动感知算法
改善之后的触觉图像能够在目标的运动中准确显示接触面形状,为在触觉坐标系中精确计算目标平移和旋转提供了重要保证。
2.1 目标平移感知
本算法通过在触觉坐标系上计算接触图像形心以获取目标位置的变化,形心的计算公式如下:
(7)
式中:n为触觉图像中强度值非零的像素点数量;pk为这些像素点在触觉坐标系中的坐标;pcenter为接触面形心的坐标。
通过计算不同时刻下触觉图像中接触面形心坐标的差值,可以判断运动目标的平移,如图6所示。

图6 通过形心计算目标平移
2.2 目标旋转感知
算法获取目标的平移信息后,会在触觉坐标系中对2张触觉图像的位置进行对准,对准后2张触觉图像只有姿态的差异,如图7所示。
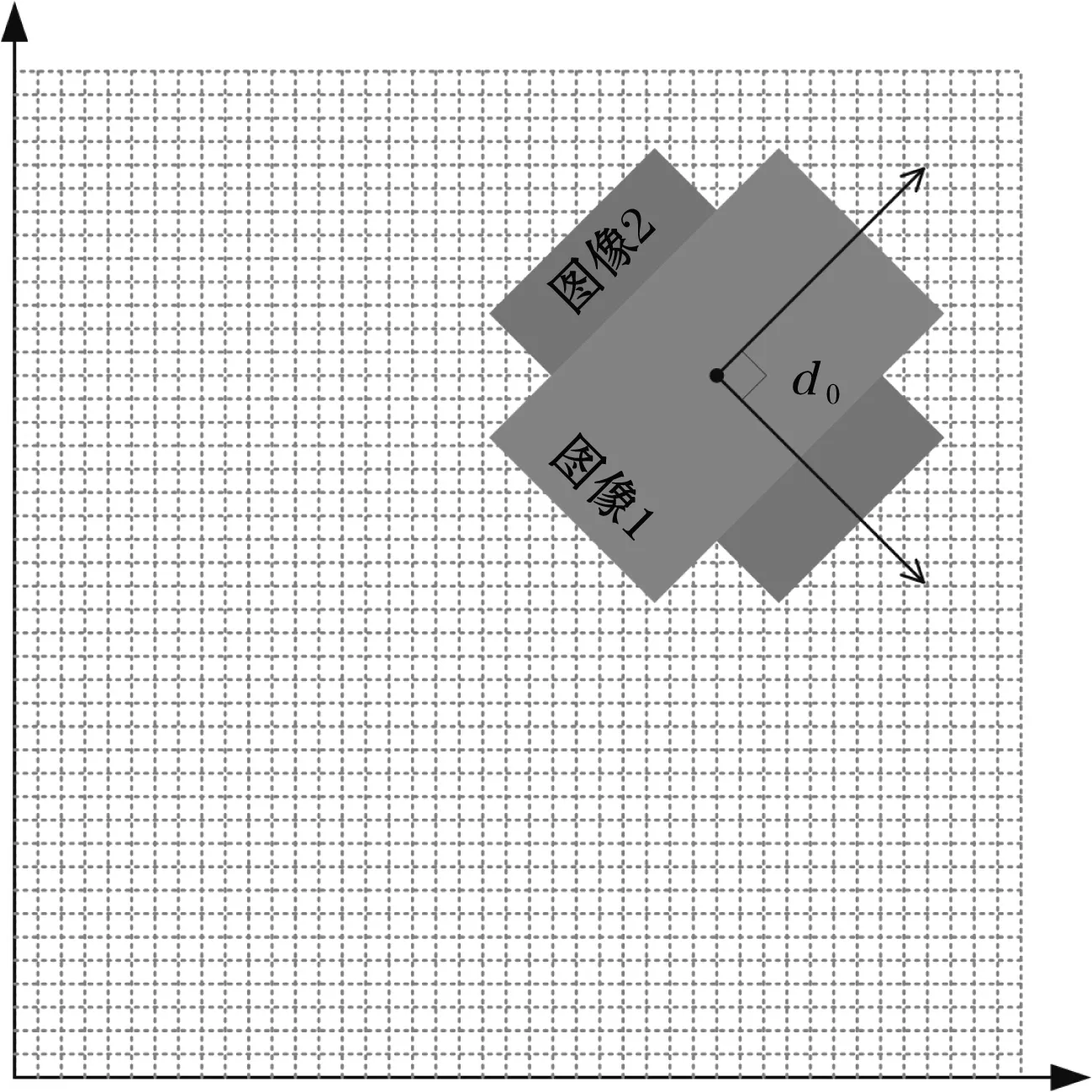
图7 通过旋转配准计算目标旋转
接着本算法不断旋转第一张触觉图像,并在旋转过程中计算2张触觉图像的差异值,差异值最小的旋转角度即为采样间隔内目标的旋转角度。由于接触力的分布并不总是相同的,使用加速搜索算法会得到局部极小值[23]。为避免出现该问题,本算法采用了对最小差异值的全搜索。然而对触觉图像进行图形学的旋转变换非常耗时,全搜索策略的时间开销会非常巨大。为改善效率,本算法在搜索前先使用对数极坐标变换[24],将触觉图像映射到对数极坐标系中,它的实现如下:
(8)
(9)
式中:x和y为强度值非零像素点在坐标系上的横坐标和纵坐标;xc和yc为接触面形心坐标;M为缩放幅值;ρ为像素点与形心的对数距离;θ为像素点相对于形心的方位;ρ和θ组成了对数极坐标系的横坐标和纵坐标。
在对数极坐标变换后,原坐标系中的旋转变化在对数极坐标系中被转换成了平移变换。由于在图形学中执行平移变化的时间开销远小于旋转变化,便可以为对数极坐标系中的第一张触觉图像测试所有可能的平移,搜索使2张触觉图像差异值最小的平移。为了进一步加强算法对姿态的分辨率,本算法在对数极坐标系的ρ方向上对2张触觉图像进行了8倍线性插值。图像平移和差异值计算的实现如下:
(10)
(11)
(12)
式中:Ilp1和Ilp2为对数极坐标中的触觉图像;Mtranslate为初等变换矩阵,它负责实现把Ilp1平移至与Ilp2相同的姿态;E为差异值,是触觉坐标系内2张触觉图像内所有像素点强度值之差ek的和;φ()为增强算法鲁棒性的函数;a为异常阈值,取所有误差ek的平均值。
使差异值E最小的初等变换矩阵Mtranslate即是算法在对数极坐标系内搜索到的最佳平移,将该平移转换成触觉坐标系中的旋转角度,即可获得不同时刻下运动目标的姿态差异,进而判断运动目标的旋转。
2.3 运动速度感知
由于电子皮肤是以固定的频率采集触觉图像的,因此在获取不同时刻下运动目标的位置和姿态后,可以进一步计算目标的运动速度。假设电子皮肤的采样频率为f,目标在采样间隔内位置或姿态的差异为d,则目标平移或旋转的瞬时速度v计算如下:
v=f×d
(13)
在实际应用中,电子皮肤与运动目标的接触并不总是相同的,相邻时刻差异较大的接触会使姿态差异d的计算出现较大误差,因此只使用一个采样间隔内2张触觉图像的式(13)计算得到的速度会与真实速度产生较大的偏差。为解决这个问题,本算法使用了多个采样间隔内连续的触觉图像,并以图像序列的第一张图片为基准,计算其他图像与第一张图像之间的位姿差异,接着利用线性回归模型拟合这些差异,拟合后,线性回归模型的斜率即为目标的运动速度。
3 实验验证
为了验证运动感知算法的准确性,本研究设置了验证实验。该实验固定电子皮肤的位姿不动,控制六自由度高精度并联运动定位平台(Hexapod M850,PI,德国)驱使目标接触电子皮肤,并在接触后为目标提供精准的平移和旋转运动,整个实验设备如图8所示。

图8 实验平台
实验中,Hexapod平台为目标提供行程不同的平移和旋转运动以全面测试算法的准确度,每一次测试都会重复20次以减小随机因素的干扰。实验结果如表1所示。该结果显示算法感知平移时相对误差在1.9%~2.7%的范围内变化,感知旋转时相对误差在5.0%~9.7%的范围内变化。在感知不同距离平移时,算法的最大误差仅为1.0 mm,小于电子皮肤传感器阵列的间距2.5 mm,且算法的平均误差远小于运动行程,这说明本算法在加强电子皮肤分辨率的同时实现了对平移运动的精确感知。此外实验结果显示算法对旋转运动的感知并未像平移运动感知那么精确,这是由于皮肤传感器阵列的间隔长度和目标物体尺寸相比过大,导致电子皮肤无法准确感知微小的旋转运动。产生误差的另一个原因是目标与电子皮肤的接触并不总是相同的,这会干扰触觉图像差异值d的计算,进而影响对旋转角度的感知。

表1 实验验证结果
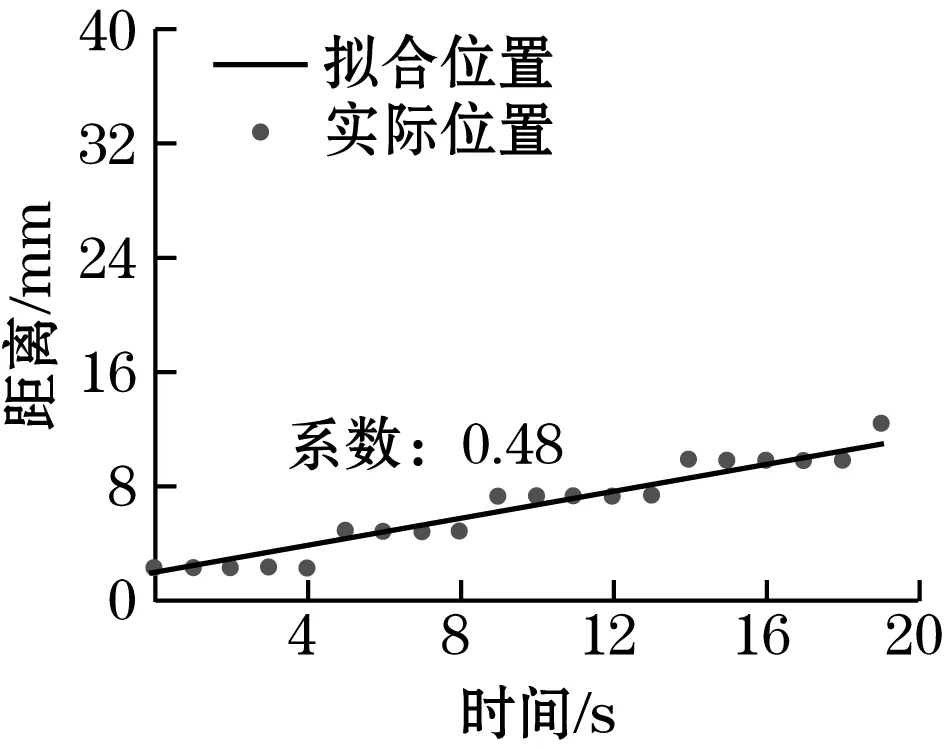
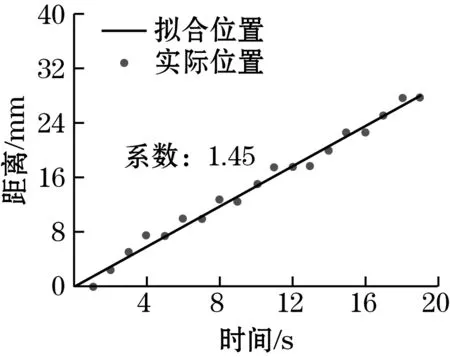
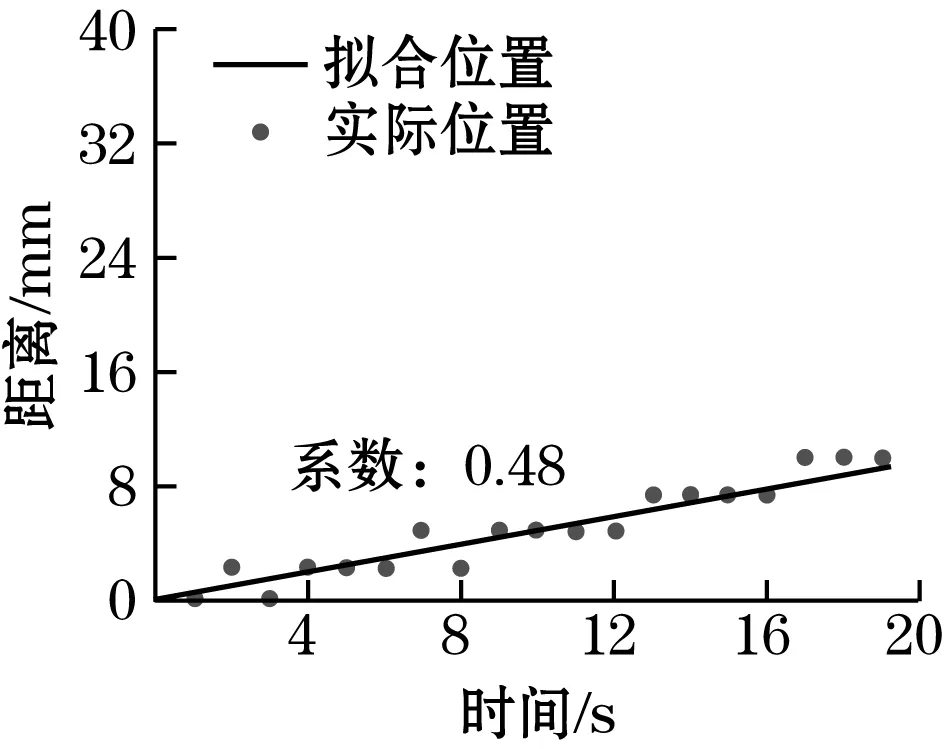
本研究除了验证算法对平移距离和旋转角度的计算之外,还验证了算法对平移旋转速度的计算。在平移速度验证中,Hexapod平台驱动目标以0.5、1.0、1.5、2.0 mm/s的速度在电子皮肤上平移。使用线性回归模型对不同时刻下的目标位置进行拟合,对X方向和Y方向平移拟合的结果如图9和图10所示。拟合模型的斜率非常接近目标实际的平移速度,相对误差在3.4%~6.0%的范围内变化。
(a)0.5 mm/s

(b)1.0 mm/s
(c)1.5 mm/s

(d)2.0 mm/s
(a)0.5 mm/s

(b)1.0 mm/s

(c)1.5 mm/s

(d)2.0 mm/s
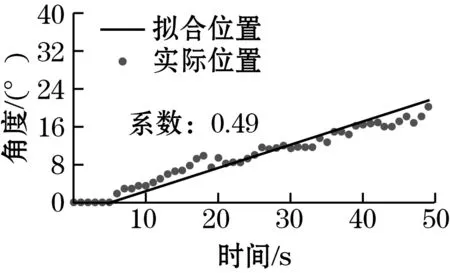
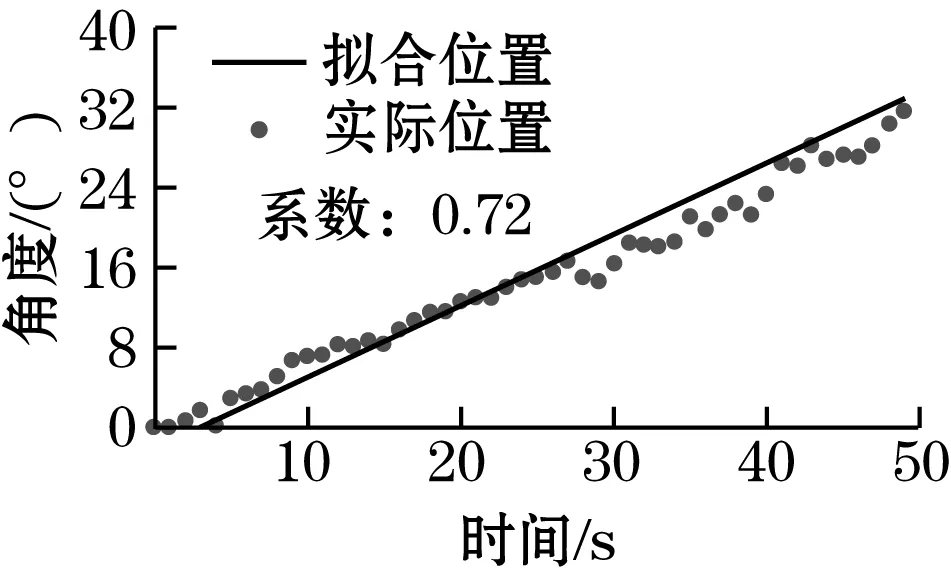
在旋转速度验证中,Hexapod平台驱动目标以0.25、0.50、0.75、1.00°/s的速度旋转,同样使用线性回归模型拟合,结果如图11所示,拟合模型的斜率仍非常接近目标实际的旋转速度,相对误差在2.0%~4.0%的范围内变化。从拟合图中可以看到,在运动速度慢的情况下,使用多幅触觉图像进行速度拟合,可以有效解决电子皮肤由于分辨率低,无法识别微小运动进而影响低速运动感知的问题。此外,该方法还能降低随机误差对结果的干扰,因此极大提高了算法的精度。

(a)0.25°/s
(b)0.50°/s
(c)0.75°/s

(d)1.00°/s
4 结束语
本研究提出了基于电子皮肤的运动感知算法,经过实验验证,该算法能准确识别运动目标的平移和旋转,为机器人在极端环境下交互运动目标提供技术支持。下一阶段本研究需要分析电子皮肤与接触目标发生滑动时触觉图像强度值的变化,并通过图像融合技术获取目标的形状,在时域和频域下分析强度值变化规律判断目标柔顺性、质地等物理性质,最终完成对交互目标准确、全面的感知。
