VANETs 系统仿真信道建模优化
2020-07-13陈丽霞谭海艳
◆陈丽霞 谭海艳
(湄洲湾职业技术学院 福建 351119)
1 引言
在移动通信的研究中,信道建模有着重要的意义,设计出的信道模型必须和真实通信场景有良好的逼近性,并且有较低的复杂度,如此才能保证仿真结果有良好的实现性,提高仿真结果的可信度。
大多数网络仿真平台聚焦于MAC 层以上的性能研究,因此对VANETs 的小尺度建模普遍使用简单的瑞利衰落作为小尺度衰落模型,显然从物理层性能的再现而言这是极不精确的。因为,实际的车辆信道同时存在时间、频率上的相关性,在时域表现为某一时刻的衰落系数与之前的衰落系数具有一定的相关性,在频率表现为某一子载波的衰落系数与相邻子载波的衰落系数具有一定的相关性。而传统的瑞利衰落是独立生成的,所有的信道响均应不具备相关性,无法刻画出真实的车辆信道的衰落情形[2-5]。
2 信道建模
在车辆自组织网络的信道建模方面,乔治亚理工大学的学者做了大量的测量工作,并采用抽头延迟线模型给出了频域、时域双选择信道建模方法[1],该模型已经被802.11p 官方所采用。文献[1]中给出了大量的实测信道和建模之后的信道响应之间的比较,结果表明该方法能够较为准确地描述VANETs 信道的时频二维选择特征,是一种较为合理的建模方法。 诺丁汉特伦特大学的研究员StylianosPapanastasiou 在802.11p 点对点链路的物理层仿真中采用了该建模方式[6],而在网络的系统性能仿真方面,因网络仿真平台整体建模实现的难度较链路仿真更为复杂,尚未有研究人员对其进行实现。因此,为了提高网络仿真的精确性,本文在网络仿真平台中对该模型进行了仿真实现,下面具体介绍一下该信道模型及其在仿真平台中的实现过程。
2.1 信道建模
文献[1]给出的小尺度信道模型包含了以下六个场景:
V2V Expressway Oncoming:高速公路,车与车相向行驶
RTV Urban Canyon:城区高楼间,路边设施与车辆之间通信
RTV Expressway:高速公路,路边设施与车辆之间通信
V2V Urban Canyon Oncoming:城区高楼间,车与车相向行驶
RTV Suburban Street:城郊街道,路边设施与车辆之间通信
V2V Expressway Same Direction with Wall:高速公路,车与车同向行驶(车道间有墙体相隔)
其中V2V 表示vehicle-to-vehicle,即车与车之间的通信;RTV表示roadside-to-vehicle,即路边设施与车辆之间的通信。每一种场景的信道都由若干个抽头(tap)及其时延功率谱来描述,而每个抽头又由若干个时延相同但相对功率以及多普勒频谱不同的径(path)组成,表1 给出了六种场景的信道建模参数。表中的六维向量分别代表六种场景的参数,其场景排列顺序依次为V2V-Expressway Oncoming、RTV-Urban Canyon、RTV-Expressway、V2V-Urban Canyon Oncoming、RTV-Suburban Street、V2V-Express Same Direction With Wall,第一列表示每种场景的抽头序号,第二列是径的序号。这两列组合起来,表示某一个径可以在某一个场景的某一个抽头中出现。其余的列都是该径的参数,包括抽头功率、相对径功率、径时延、K 因子(如果有直达径)、频率偏移、多普勒衰落、直达径的多普勒频移、多径类型(Rayleigh 或Rician)、多普勒功率谱形状。
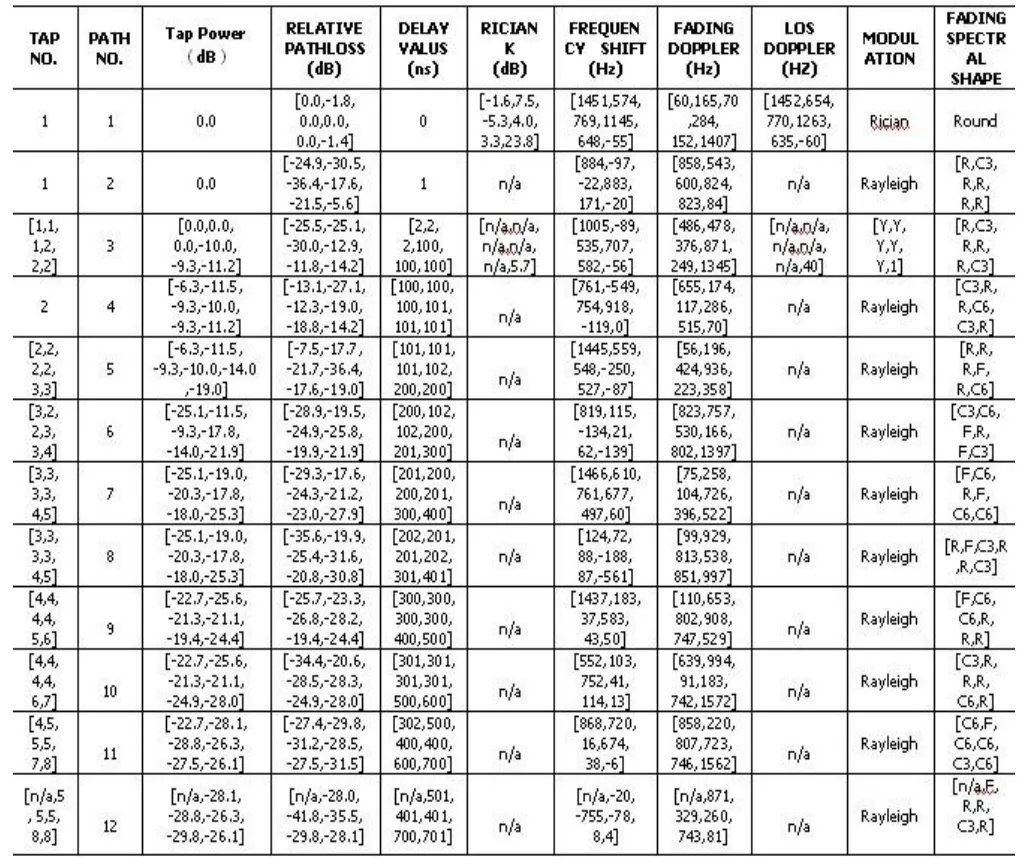
表1 六种场景的信道建模参数表
2.2 仿真及结果分析
下图1 中是采用建模后的多普勒功率谱与实际测量功率谱逼近的几个结果,其中(a)是V2V-Expressway Oncoming 场景的第1 条抽头,(b)是V2V-Expressway Oncoming 场景的第2 条抽头,(c)是V2V-Express Same Direction With Wall 场景的第1 条抽头,(d)是V2V-Express Same Direction With Wall 场景的第2 条抽头。可见在给出的结果当中,所采用的建模方法得到的多普勒功率谱都能够很好的逼近实际测量的多普勒功率谱,说明用此方法建模方法的准确性[7]。

图1 建模多普勒功率谱与实测功率谱的逼近结果
本文在具体实现上述时频二维选择性信道时,每一次的信道实现,也即信道系数的生成,都需要经过以下步骤:
(1)多普勒滤波器生成
根据每个径对应的多普勒频谱形状、多普勒展宽以及多普勒频移等参数,将其频域采样信号经过ⅠFFT 变换到时域,时域的点数应为符号个数。如果该径存在直达路径,则增加其LOS(直达径分量)。归属于同一个抽头的不同径,将其时域系数相加合并,生成该抽头的多普勒滤波器。
(2)抽头系数生成
生成多组独立的复高斯噪声,每组都经过上面每一抽头对应的多普勒滤波器,得到多组抽头系数。
(3)时频二维信道系数生成
每个抽头的信道系数都生成以后,根据时延功率谱对每个符号时间内的各个抽头做FFT 变换,生成各个子载波上的频域信号。
至此二维信道系数生成完毕。
图2 给出了最终生成的一帧时间内的时频二维信道幅度示意图。其中x 轴水平方向表示的是时域,y 轴垂直方向表示的是频域,该图表示在时域采样90 个点、频域采样52 个OFDM 子载波后的信道响应幅度值。

图2 车辆信道时频二维采样
3 小结
对VANETs 的网络性能的研究需要网络仿真平台的支撑,而现有的开源仿真平台结构较为复杂,难以使用,并且在物理层建模上存在一些问题,影响了系统仿真性能精度,如小尺度模型采用简单的独立瑞利信道,这与真实的车辆信道状况相差甚远。因此,针对现有的建模问题,本文对VANETs 系统仿真进行信道建模优化。
由于车载网络使用正交频分复用技术(OFDM)技术,频段设置在5.9GHz,每个信道的带宽为10MHz,因此,车载通信所使用的信道建模需要反映出车载网络信道的时间选择性和频率选择性[9]。本文信道建模采用了乔治亚理工大学提出的802.11p时频双选择信道模型,考虑了OFDM 符号之间的时间相关性和OFDM 子载波之间的频率相关性,从而保证仿真结果有良好的实现性,提高仿真结果可信度。
