面向舰船目标检测的单通道复值SAR图像统计建模方法研究
2020-07-13冷祥光计科峰熊博莅匡纲要
冷祥光 计科峰 熊博莅 匡纲要
(国防科技大学电子科学学院 电子信息系统复杂电磁环境效应国家重点实验室 长沙 410073)
1 引言
作为一种主动式成像传感器,相比于红外、光学等被动式传感器,合成孔径雷达(Synthetic Aperture Radar,SAR)可以全天时、全天候地获取高分辨率图像[1–4]。其具有成像模式丰富、覆盖范围广、分辨率高等特点,能够长期、动态、宏观地对海洋进行监测,目前已成为世界各国监测海洋目标的主流方法之一[5–11]。
单通道SAR图像在舰船目标检测系统中应用极为广泛,一直是海洋监视领域的研究重点[12–17]。随着SAR技术的快速发展,先进的SAR传感器如TerraSAR-X,COSMOS-SkyMed,RADARSAT-2,ALOS-PALSAR,Sentinel-1和高分三号等可以提供相比过去更高的分辨率。更高的分辨率使得海杂波背景更加地不均匀,因此对舰船目标检测方法也提出了更高的要求。SAR采用微波相干成像,因此单通道SAR图像的本质是复值的,这是其和普通光学红外遥感图像的显著不同之处和核心区别之一。然而,在完全发展的相干斑的假设条件下,以恒虚警率(Constant False Alarm Rate,CFAR)为代表的传统单通道SAR图像舰船目标检测方法主要研究幅度信息[9,12–20],认为相位服从均匀分布,不包含任何有效信息。同时,深度学习在传统图像目标检测识别领域取得了突飞猛进的发展,但是绝大多数研究者采用深度学习方法对SAR图像处理时也仅考虑幅度信息,将其作为普通的光学图像进行对待。
考虑到传统观点主要基于过去低分辨率SAR图像,其必须满足以下条件[1]:(1)均匀媒质的一个分辨单元内有大量的散射单元;(2)斜距距离远大于雷达波长;(3)以雷达波长尺度衡量媒质表面非常“粗糙”;但这些并非完全适用于如今的高分辨率SAR图像[21–24],也就是说完全发展的相干斑的部分假设条件在高分辨率情形下并非严格成立。这主要是因为更高的分辨率通常意味着更小的分辨单元,同时一个分辨单元内包含的散射子也更少。对于舰船目标而言,其中一些散射子的强散射可能会对整个后向散射起到主导性的作用。单通道复值SAR图像既包括了幅度信息,也包括了不同于幅度的描述目标状态的相位信息,因此亟需对单通道SAR图像的相位或者复值信息进行研究,这将能在复值层面更完整地描述舰船目标和海杂波的区别,也有助于更深刻地理解SAR图像不同于普通光学遥感图像的复值本质,对提升单通道SAR图像舰船目标检测性能具有重要意义。
此外,近十年来,复值信号处理理论和方法得到了快速发展,Ollila等人[25–27]、Eriksson等人[28,29]和Novey等人[30–32]的先驱工作进一步揭示了复值信号处理和传统实信号处理的区别,Schreier和Scharf二人[33]对复值数据统计信号处理方法进一步进行了总结。在此基础上,El-Darymli等人[23,24]对单通道复值SAR图像目标分类问题进行了研究,Wu等人[34,35]对单通道复值SAR图像的地物分类问题进行了研究,Soccorsi等人[36,37]采用高斯-马尔科夫随机场模型对单视复值(Single Look Complex,SLC)数据进行了建模研究。这些初步结果证明了复值信息对单通道SAR图像解译具有重要作用。
本文面向舰船目标检测,将单通道复值SAR图像统计建模方法分为幅度统计建模、相位统计建模和复值统计建模3个部分,在对单通道SAR图像幅度统计建模方法进行简要介绍的基础上,首先重点对相位统计建模方法进行研究,引入了相位循环统计量并介绍了适用于相位统计建模的Von Mises分布,并且论证了所提邻域相位方向差特征对区分舰船目标和海杂波的可行性。然后本文对基于复广义高斯分布的单通道SAR图像复值统计建模方法进行研究,详细介绍了其概念和生成过程,并且重点对其参数估计方法进行了研究,比较了基于最大似然法和提出的基于高阶矩的形状参数估计方法。同时本文还介绍了作者研究小组在基于复值统计信息的单通道SAR图像舰船目标检测的部分最新研究成果。最后本文展望了进一步研究方向。
2 单通道SAR图像幅度统计建模方法
对于传统CFAR舰船目标检测算法而言,对海杂波幅度概率密度函数进行精确的描述至关重要。概率密度函数的精度会影响到检测结果的可靠性和稳健性。但是描述不同状态下的海杂波比较复杂,这是由于海面SAR成像通常受到许多因素的影响,比如海洋表面特性(海况、风速、风向等)、成像几何(入射角、方位角等)、雷达参数(分辨率、波长、极化方式等)以及外部干扰(射频干扰等)等[2,38,39]。由于已有大量相关文献对幅度统计建模进行阐述[8,9],因此本节对此仅进行简要介绍。
当满足完全发展的相干斑条件时,传统观点认为可以采用中心极限定理对海杂波进行描述。因此,海杂波实部和虚部通常被认为服从高斯分布,单视幅度服从Rayleigh分布,多视幅度服从Nakagami分布(Gamma均方根分布)[1]。当分辨率较低时,这些分布可以对SAR图像海杂波进行较好的拟合。但是当SAR图像分辨率提高时,海杂波呈现较强的拖尾特性[40],和Rayleigh分布或Nakagami分布存在明显不同。
为了描述海杂波的拖尾特性,K分布[40]、对数正态[41]和Weibull[42]模型等被提出来。虽然对数正态和Weibull分布模型是经验的,但可以较好地描述Rayleigh分布无法描述的高分辨率SAR图像海杂波。此外,K分布是一种重要的分布模型,其将海洋回波认为是具有不相关事件的两个分量的调制结果。K分布可以通过假设分辨单元内散射单元数目服从负二项式分布得到,也可以利用服从Rayleigh分布的幅度和服从Gamma分布的纹理表征乘积模型得到[1]。K分布是基于物理散射过程推导的,可以退化为Rayleigh分布,因而具有显著优势。但是K分布依然无法对一些高海况引起的极不均匀海洋杂波进行较好地描述。因此,许多学者尝试对K分布进行了改进。改进方法主要可以分为两类[7]。其中一种观点认为相干斑不是完全发展的,在高分辨率条件下中心极限定理不再适用。从这点出发,提出了一些相关的分布模型。例如,当在均匀海杂波中存在一个强反射时,可以采用Nakagami-Rice分布[43,44]。此外,重拖尾Rayleigh分布(Heavy-Tailed Rayleigh,HTR)[45]以及最近提出的广义K分布(Generalized-K,GK)[46]同样属于这一类型。其中,重拖尾Rayleigh分布认为海杂波实部和虚部服从零均值的对称α稳态分布[47],其可以描述比传统Rayleigh分布拖尾更长或者更像脉冲的分布;广义K分布是K分布的扩展,可以被用于描述单通道或者多通道SAR图像等多种不同情景[11,46,48]。另一种改进K分布的思路认为依然可以采用完全发展的相干斑假设,但是需要加上一些额外的分量(例如热噪声或Rayleigh残留)进行校正。K+Noise(K+N)[49],K+Rayleigh(K+R)[50],Pareto+Noise(P+N)[51],KA[52]和KK[53,54]等分布均是根据这种原理来改进传统的K分布,因此也能较好地描述海杂波中的尖峰或者热噪声等。在这些模型中,因为需要估计的参数太多,KA和KK分布在实际中较难应用。K和K+N分布都可以认为是K+R分布的特例。同时,相比于P+N分布,K+R分布可以更好地描述海杂波[55,56]。此外,G0分布和广义Gamma分布也是在SAR图像应用中使用较多的模型,其精度相对K分布具有一定的优势[57]。
在检测舰船目标的实际应用中,除了需要考虑统计分布模型的精度,还需要考虑更多因素[7,8]:
第1点就是要考虑模型的复杂度以及在实际应用中的可行性。在前面提到的一些模型中,例如HTR,K+R以及P+N等,虽然理想情况下拟合精度更高,但是其参数估计方法复杂不稳定;同时即使准确求出所有参数,其阈值求解方法同样严重依赖于复杂的数值模型。这就使得它们虽然可用于某些SAR图像处理应用,例如滤波[58],但它们并不是舰船目标CFAR分布模型的理想选择。
第2点就是要考虑模型的适应性。这里的适应性不仅指对不同海况的描述能力,同时指对不同类型的SAR图像,例如对单视/多视图像和幅度/强度图像等的适应能力。K分布是最为广泛使用的分布模型之一,其中最主要的原因就是K分布不仅可以拟合单视幅度图像,还可以拟合多视幅度图像,且幅度K分布和强度K分布的参数之间存在明确的关系。
第3点就是要辩证看待基于物理模型和经验模型的分布。通常基于物理模型的分布可以更好地解释SAR图像中的一些现象。但是,由于海杂波复杂的电磁散射机理,物理模型也很难描述各种不同状态下的海杂波分布。另一方面,许多物理模型本身就基于经验模型,并没有很好地解释其中的原因。相反地,虽然部分经验模型没有严格的物理模型支撑,但却能够较好地拟合海杂波。这说明基于物理模型和经验模型的分布之间并没有严格的区分。因此在实际舰船目标检测应用中,只需模型能够较好地拟合真实杂波背景即可,而不需过多关注其建立的依据。
3 单通道SAR图像相位统计建模方法
回波信号的相位一方面来源于电磁波的传播路程,一方面来源于多个散射点随机散射的综合结果。SAR图像最终记录的相位信息是幅角的主值,其在极化或干涉应用中具有重要的作用。但在文献中很少见到关于直接利用单通道SAR图像中的相位信息进行应用的报道。很少一部分学者在这方面进行了研究。早期,Rihaczek和Hershkowiz[59,60]在这方面出版了两部著作,但是没有引起足够的重视。MIT林肯实验室的Jao等人[61]提出了一种相干空间滤波器,但是只适用于检测直线目标。最近,德国DLR的Datcu教授等人[62]重新提出了一系列对米级高分辨率SAR图像相位信息进行描述的构想。加拿大北部雷达实验室的El-Darymli等人[23,24]对此进行了一些初步的研究。本节结合相位数据的特点,将引入循环数据统计量的方法对相位进行统计描述,然后介绍适用于相位建模的von Mises分布以及可以描述相位信息的邻域相位方向差特征。
3.1 相位循环统计量
相位是一种典型的循环数据(circular statistics),其分布是一种循环分布(相位-π和π在圆上首尾相接在同一个点)。对这种数据的统计描述有别于传统的非循环数据。例如考虑两个角度,1°和359°,按传统方法计算会认为其均值直接为180°。但是稍加思考就会发现,将其均值认为是0°会更恰当。针对循环数据需要使用专门的统计量才能对其进行有效描述。在解译这些统计量时要注意将所有相位当作矢量,然后首尾相连,才能更好地理解[63]。
设有一组相位观测量x1,x2,…,xn,…,xN,其中xn表示第n个相位观测值,N是其总数,令

则根据Fisher[64]以及Mardia和Jupp[65]的论述,对应传统非循环数据的部分统计量可以给出以下一些相应定义:
(1) 循环均值(mean direction)

μ是所有相位的平均值,代表了平均方向。
(2) 循环方差(circular variance)

V在0~1之间变化,表示所有相位关于相位平均值的偏差。
(3) 循环标准差(circular standard deviation)

(4) 组合长度(resultant length)

(5) 平均组合长度(mean resultant length)

(6) 循环离散度(circular dispersion)

其通常被用于计算区间置信度。
(7) 循环偏度(circular skewness)

图1给出了TerraSAR-X SM模式图像中2个舰船目标和2个海杂波切片的幅度图像示例。其分辨率约为3 m,极化方式为VV。图2是图1中图像中心黄色矩形区域对应的相位图像。由图2可以看出,舰船目标和海杂波的相位图像存在一定的差别,这主要体现在相位图像的纹理上。舰船目标相位图像的纹理存在一些更小的细节,其强散射点方位向和距离向上存在一些明显的条纹模式。但是这些差别由于条纹的相互重叠和随机性通常是难以描述的。图3是舰船目标和海杂波的相位直方图。由图3可以看出,舰船目标和海杂波的相位都近似服从均匀分布,相位平均值和方向存在很大的随机性,而相位长度都近似为0。表1进一步列出了舰船目标和海杂波的部分循环统计量结果。可以看出,舰船目标和海杂波的方差、标准差、偏度以及峰度等其它循环统计量之间不存在明显的差异。这是直接利用相位图像的一些统计信息进行目标识别的一个难点。
3.2 Von Mises分布
与一元正态分布相对应,Von Mises分布[66]通常被称为圆上的正态分布(循环正态分布),是一种描述方向数据的重要模型。它是N维球面上Von Mises-Fisher分布的一种特例。作为正态分布在圆上的模拟,其可以描述SAR图像中相位的分布。循环随机变量的概率密度函数表达式为

图1 TerraSAR-X舰船目标和海杂波幅度图像示例Fig.1 TerraSAR-X ship target and sea clutter amplitude images

图2 TerraSAR-X舰船目标和海杂波相位图像Fig.2 TerraSAR-X ship target and sea clutter phase images

图3 TerraSAR-X舰船目标和海杂波相位直方图(以玫瑰图形式展示,红线表示平均方向)Fig.3 TerraSAR-X ship target and sea clutter phase histograms (Presented in rose charts.Red line indicates mean direction)

其中,I0(κ)是修正的0阶Bessel函数,I0(κ)=。参数μ和是正态分布中均值和方差的模拟量。参数μ是循环平均值,注意其跟传统的均值意义不同,它是位置的度量。κ表征相位聚集的程度(所以1/κ是正态分布方差的模拟量)。如果κ为0,分布将变为均匀分布;如果κ增大,分布将趋于以μ为均值1/κ为方差的正态分布。图4展示了不同κ值下的von Mises概率分布情况。
Von Mises分布参数估计可以采用最大似然估计方法。其中参数μ是循环均值,其最大似然估计结果定义为[64]

其中N是相位观测值的总数,xn表示一个特定的相位观测值。
为了估计参数κ,首先需要估计平均组合长度的平方统计量2[64]



因此,当N足够大时,求解下述等式可以得到参数κ的最大似然估计结果[64]

其中,Im(κ)为定义如下的Bessel函数

3.3 邻域相位方向差
单通道SAR图像中的相位图像通常近似服从均匀分布,直接对其进行建模看起来是没有意义的。相位图像必须经过一定的特殊处理才能更好地提取其中的信息。考虑极化或干涉SAR图像应用中相位信息的使用,必须具有两幅以上同一地区的图像才能有效提取一些信息,即其中必须有1幅图像作为参考图像使用,从而形成1幅主图像和1幅从图像。
考虑使用相位图像的邻域平均相位图像来生成一个参考图像,再通过处理原始相位图像和邻域平均相位图像的相对关系来获取相位信息,本文将这种特征称为邻域相位方向差(Neighborhood Phase Direction Difference,NPDD)。具体步骤为:
(1) 由复值SAR图像f(u,v)得到其对应的相位图像θ(x,y)

表1 TerraSAR-X舰船目标和海杂波相位图像循环统计量结果Tab.1 Circular statistical results of TerraSAR-X ship target and sea clutter
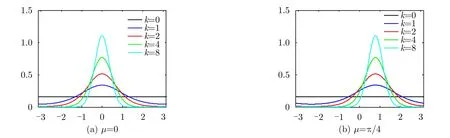
图4 不同参数下von Mises分布示例Fig.4 PDFs for von Mises distribution at different parameters

(2) 计算相位图像在不同大小邻域Wr内的循环平均值图像

其中r表示邻域半径,规定若r >1,Wr则表示不包括中心点的邻域;若r=1,Wr表示中心点本身;N是邻域内相位观测值的数量。
(3) 最终由不同平均相位图像之差得到相对相位图像

El-Darymli等人[67–69]提出了一种名为后向散射相对相位图像(Backscatter Relative Phase Image,BRPI)的特征来对相位进行描述,其通过原始SAR图像相位图像和经过核卷积之后的相位图像之差得到。但其没有对该过程的具体含义进行很好地解释。El-Darymli等人提到使用不同形式的核(通常中间为0,周围为1)来进行卷积运算,其实质则是挑选不同的邻域相位进行计算。本节的步骤(2)明确了其卷积操作实质就是求取这些相位的循环平均值。根据循环平均值的概念可知,这实际是在求取这些邻域相位的平均方向。由此可知,本节的步骤(3)的意义是求取不同邻域相位的平均方向之间的夹角。最终通过组合不同的邻域,可以求得多个不同的夹角,以此来希望获得能反应目标信息的一些相位信息。后向散射相对相位图像是邻域相位方向差图像当t=1时的特例,邻域相位方向差图像则是包括了所有邻域平均相位图像之差的一般形式。本文提出的邻域相位方向差已经包括了所有后向散射相对相位图像的有效情形。
以取s=3,t=1为例,获得3.1节中舰船目标和海杂波对应的邻域相位方向差图像NPDD31。如图5所示,NPDD31图像主体以0为主,说明和的方向角对大部分背景而言是一致的。而舰船目标强散射点引起的相位图像中的条纹得到增强,在NPDD31图像中变得更加明显。图6是对应的邻域相位方向差图像的直方图。由直方图结果可以看出,舰船目标和海杂波的邻域相位方向差不再服从均匀分布,相位平均值均指向0附近,而相位长度存在一定区别。
表2详细列出了邻域相位方向差的循环统计量结果。对比原始相位图像循环统计量结果可以看出,邻域相位方向差的循环统计量呈现出一定的规律,这也可以直接从邻域相位方向差的图像直观反映得到。具体而言,相比于海杂波,舰船目标的循环方差、标准差更大,同时长度和峰度更小,这说明舰船目标的邻域相位方向差是更分散的,这和邻域相位方向差的工作原理一致。非0邻域相位方向差主要出现在二面角存在的地方,验证了邻域相位方向差的基本工作原理。因为即使邻域范围很小,舰船目标和海面交界处一般会发生相位的剧烈跳变,相反海杂波的相位变化缓慢,在邻域平均的过程中相位变化得到了抵消从而相位差大多数接近0。此外,舰船目标和海杂波的均值和偏度都近似为0,这说明二者平均方向是一致的且关于平均方向都是对称的。
4 单通道SAR图像复值统计建模方法
本节主要采用复广义高斯分布对单通道复值SAR图像进行建模研究。复广义高斯分布是一类直接描述复值数据的重要分布,其形状参数是描述非高斯性的一种重要复值信息。本节将首先对广义高斯分布进行介绍,然后对其复值形式即复广义高斯分布进行介绍,并介绍其经典的参数估计方法[30,31],最后介绍文献[70]中提出的形状参数快速估计方法。
4.1 广义高斯分布简介
广义高斯分布是一组对称分布族,包括了从超高斯(sup-Gaussian)分布到亚高斯(sub-Gaussian)分布等很多种情形,在极限情况下还包括了所有连续均匀分布和实线的截断[30,31]。这使得广义高斯分布具有非常广泛的应用。
广义高斯分布通过改变高斯分布的衰减速率而得到,其概率密度函数如下[30,31]

图5 TerraSAR-X舰船目标和海杂波邻域相位方向差图像Fig.5 TerraSAR-X ship target and sea clutter NPDD images

图6 TerraSAR-X舰船目标和海杂波邻域相位方向差直方图(以玫瑰图形式展示,红线表示平均方向)Fig.6 TerraSAR-X ship target and sea clutter NPDD histograms (Presented in rose charts.Red line indicates mean direction)

表2 TerraSAR-X舰船目标和海杂波的邻域相位方向差图像循环统计量结果Tab.2 Circular statistical results of TerraSAR-X ship target and sea clutter NPDD images

其中μ为位置参数或者说是均值,σ为标准差,β为形状参数,Γ(·)为伽马函数。拉普拉斯分布是广义高斯分布当β=1时的特例,高斯分布是广义高斯分布当β=2时的特例。当β <2时,广义高斯分布为超高斯分布;当β >2时,广义高斯分布为亚高斯分布;而当β→0和β→∞时,广义高斯分布的概率密度函数分别趋近于脉冲函数和均匀分布。图7展示了0均值下不同β和σ下的广义高斯分布概率。从中可以明显看出,形状参数β越小,概率分布函数顶峰越尖锐;标准差σ越小,概率分布函数形状越集中于均值μ。
4.2 复广义高斯分布及其生成
广义高斯分布的复值形式,即复广义高斯分布,更适合于用来描述SAR图像。这是因为SAR聚焦后的原始数据是复值形式的。一个复值随机变量可以直接表示为Z=I+jQ,其中I和Q分别代表其实部和虚部;也可以表示为双实变量的矢量形式zb=[I,Q]T,同时假设E[zb]=0,则其增广向量形式可以表示为z=[z,z*]T,z=zb,因此双变量协方差矩阵为[30,31]

增广协方差矩阵为

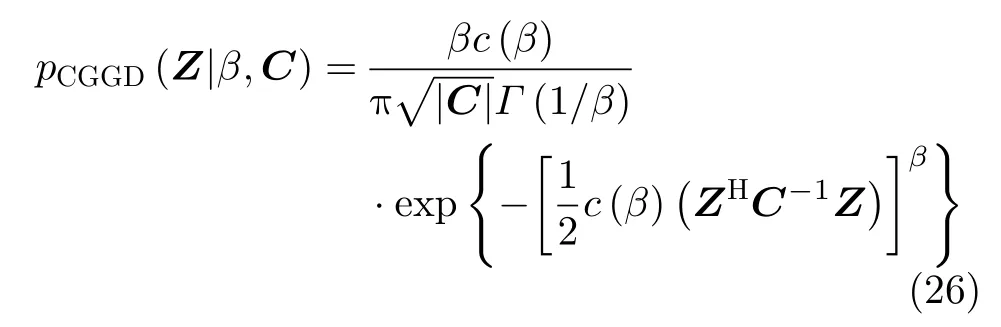
采用增广协方差矩阵形式,复广义高斯分布概率密度函数如下[30,31]

其中β代表形状参数,C代表增广协方差矩阵,H 代表共轭转置。令c(β)=,可将式(25)转换为形式上更类似于广义高斯分布的形式
不同于广义高斯分布,当β=1时,复广义高斯分布为复高斯分布;当β <1时,复广义高斯分布描述超高斯分布;当β >1时,复广义高斯分布描述亚高斯分布。注意当C为对角阵时,即±j2ρ=0时,该复值随机变量是圆性的。

图7 不同参数下的广义高斯分布示例Fig.7 PDFs for CGGD at different parameters
通常自然地物的实部和虚部分布是相同的,都接近一个高斯分布;而人造目标的实部和虚部分布可能存在一定的差异,且其实部和虚部都更接近于广义高斯分布的尖峰形态。由于形状参数可以反映概率分布函数顶峰的尖锐程度,表征数据的非高斯性,因此通常用形状参数可以区分自然地物和人造目标在形态上的差异。图8展示了舰船目标和海杂波的实部和虚部图像,而图9展示了舰船目标和海杂波直方图分布的异同。

图8 舰船目标和海杂波的实部和虚部图像Fig.8 Real and imaginary parts of ship target and sea clutter images
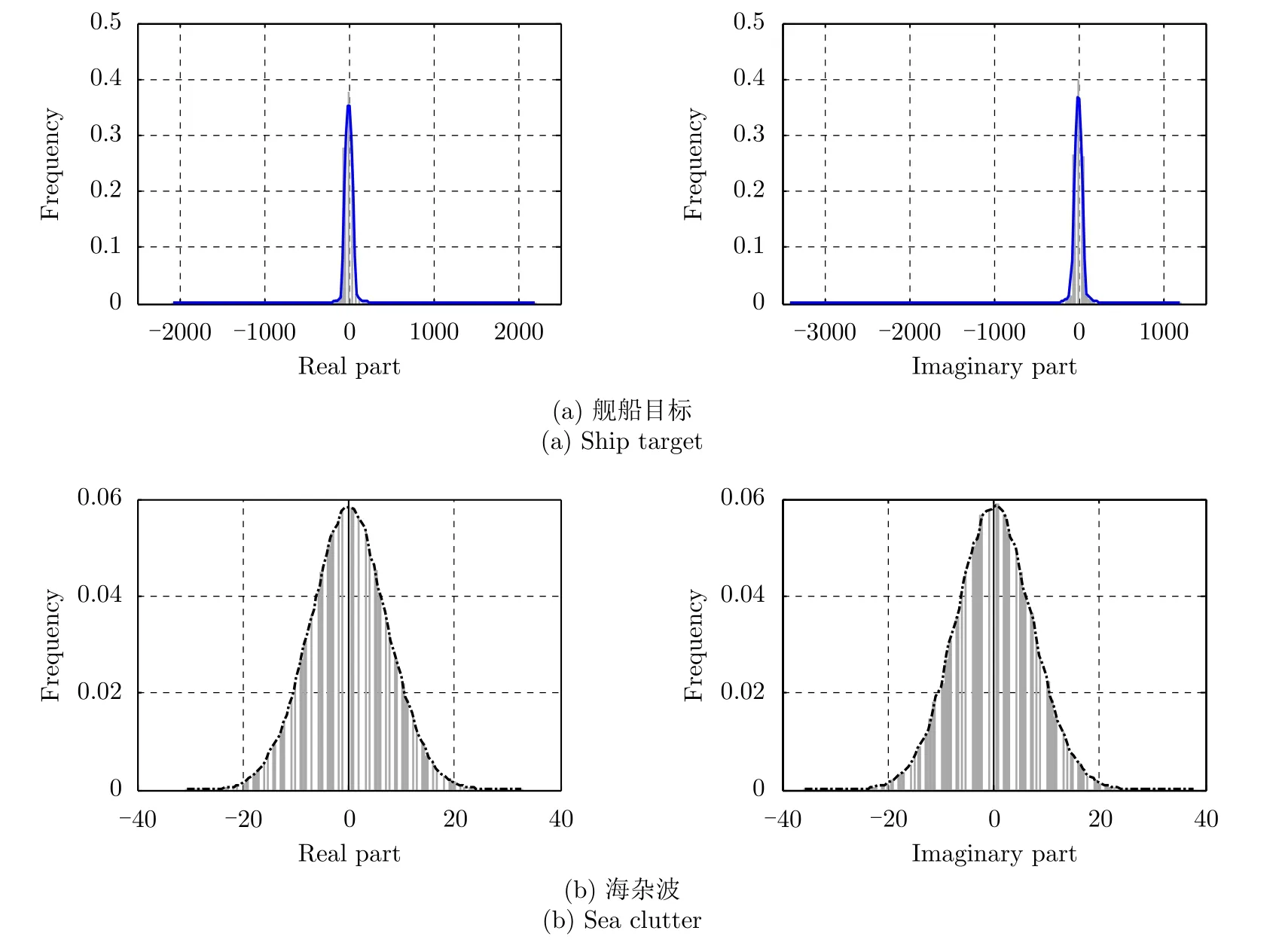
图9 舰船目标和海杂波实部和虚部的直方图Fig.9 Real and imaginary histograms of ship target and sea clutter images
复广义高斯分布样本的生成类似于其概率密度函数的推导过程。首先产生两个标准化的随机双变量,然后将其代入增广形式,最后经过一个变换产生希望的协方差。给定形状参数β,增广协方差矩阵C,以下过程生成N个独立的复变量[30,31]:
(1) 产生n=1,2,…,N个复值样本

(2) 标准化复方差

(3) 形成增广向量

(4) 计算C的矩阵平方根得到变换矩阵

(5) 进行变换

其中gamrnd,sqrtm,conj以及rand均为MATLAB里面提供的函数。
4.3 复广义高斯分布参数估计方法
4.3.1 基于最大似然估计法的复广义高斯分布参数估计
Novey等人[30,31]基于最大似然法提出了一种复广义高斯分布的参数估计方法。其是目前文献中使用最为广泛的复广义高斯分布估计方法。据谷歌学术统计,其被引超过100余次,是当前主流的复广义高斯分布参数估计方法。但是,在实际应用中Novey的方法计算效率非常低,且在一些情况下估计精度较低。其具体步骤为[30,31]
(1) 首先使用矩估计方法估计初始形状参数β
同时利用样本协方差估计初始增广矩阵C。
(2) 然后使用Newton-Raphson方法更新β

其中L表示概率密度函数的对数,同时如果β <1则使用定点方法更新C

4.3.2 基于高阶矩的复广义高斯分布形状参数快速估计
形状参数是复广义高斯分布的一个重要参数,根据Novey的方法对其进行估计计算效率很低,因此有必要提出新的估计方法。文献[70]基于高阶矩和形状参数的关系提出了一种快速的复广义高斯分布形状参数的估计方法。其推理过程如下[70]:
根据复广义高斯分布和对称Kotz型分布的关系可知非0矩可以表示为[29,71]

根据式(36)即可确定高阶矩和形状参数的关系。
同时注意到在文献中应用最为广泛的一种复信号峰度高阶矩(Complex Signal Kurtosis,CSK),其可以表示为[29,72,73]

其中μl,m为标准矩[29]。因此

考虑到复值SAR图像均值通常为0,同时假设复随机变量Z是圆性的并且存在有限的4阶矩,则有μ2,0=0,且

由此结果可知,复信号峰度可以由一个关于β的显示表达式表示。图10展示了复信号峰度和形状参数的关系。注意由于负的复信号峰度值无法用对数形式表示,复信号峰度被分为正和负的两部分,也就是说纵轴表示的是复信号峰度的绝对值。由图可以看出,复信号峰度随形状参数增大而单调递减。当β=1时,CSK=0,此时样本服从复高斯分布;当β <1时,CSK>0,此时样本服从复超高斯分布;当β >1时,CSK<0,此时样本服从复亚高斯分布。虽然β很难通过复信号峰度的显式表达式表示,但是可以通过数值计算方法通过复信号峰度求解β。文献[70]采用查找表(LookUp Tables,LUTs)的方法来解决这个问题。图11展示了具体流程图,总结起来其可以分为3步[70]:
(1) 生成查找表。根据其关系生成2种不同精度的查找表,一个低精度查找表和一个高精度查找表。β采用0~10之间的数,因为绝大多数的SAR图像分布范围都在该区间以内。β的间隔使用两种不同的精度,分别为1e-1和1e-3。然后根据关系可以得到低精度查找表(大约1 kb)和高精度查找表(大约100 kb)。这样应该有助于满足不同使用者的需求。

图10 复信号峰度和形状参数的关系Fig.10 Relationship between CSK and the shape parameter
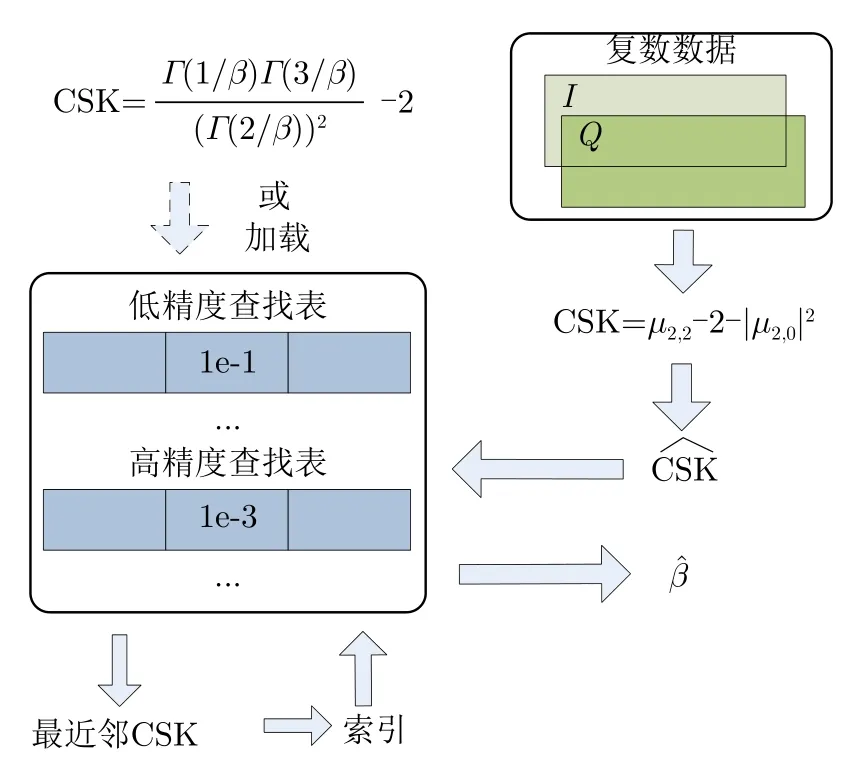
图11 基于复信号峰度的复广义高斯分布形状参数估计方法流程Fig.11 Flowchart of shape parameter estimation of CGGD based on CSK
(2) 估计样本的复信号峰度。样本的复信号峰度可以通过式(37)得到。这里将估计得到的复信号峰度值记为。最后将被用于查找表。
注意查找表只要生成过1次,即可反复使用。因此在实际操作过程中,估计形状参数只需步骤2和步骤3。该方法中的查找表和相应的MATLAB代码可以通过网站[74]自由获取。
使用4.2节中生成数据的方法来仿真复广义高斯分布样本。在样本仿真生成的过程中,C每回都是随机产生的,而β从0.1变化到4,其中间隔为0.1。每一个特定大小的β将会被测试100次,因此对于每个β本节将生成100组不同的复广义高斯分布样本。最后Novey的方法以及文献[70]中提出的基于复信号峰度的方法将被用来估计这些样本的形状参数。同时设置了不同的样本数量(size),分别为500,1500,5000,50000。
估计精度采用均方误差(Mean Squared Error,MSE)表示,结果如图12所示。具体地,当样本数量较小时(size≤500),对于较小的β(β ≤2.5大致),提出的方法和Novey的方法效果近似。此时,Novey的方法和提出的方法都倾向于得到比真值更大的估计结果,但是总体的偏差是比较小的。当样本的数量不断增加,提出方法的均方误差显著下降并且具有比Novey方法更好的性能。当样本数量size>1500,对于较大β值的估计性能显著提升。当样本数量增加到50000时,提出方法取得了非常好的估计结果,均方误差接近于0。这同时证明了提出方法相合性更好,也就是说只要样本数量足够多,提出方法就能取得较好的估计结果。对于Novey的方法而言,当样本数量增大时,其性能同样得到了提升。但是,Novey方法的均方误差是波动的,近似于一个锯齿状但有许多零点。有趣的是当样本数量增加时,这种现象会越加明显。这些0点大部分来自于Novey方法设置的初始值,其余一些来源于最大似然估计方法。当样本数量增大时,Novey的方法倾向于把形状参数估计为临近设置的初始形状参数,因此其结果会呈现出一个锯齿状。
图13展示了耗时对比。由图可以看出,当样本数量为500时,Novey的方法耗时约8.3e-2 s,提出的方法耗时约1.5e-3 s,效率提升了55倍;当样本数量增加到50000时,Novey的方法耗时约6.3 s,而提出的方法耗时约4.5 e-3 s,效率提升了1400倍。随着样本的增多,提出方法在时间消耗方面的优势变得更加明显。这是因为Novey的方法由于增多的样本耗费了更多的时间,而提出的方法仅在计算复信号峰度时增加了时间并且计算复信号峰度这个过程始终是非常简洁高效的。
总结而言,基于大量仿真实验数据的结果表明基于复信号峰度的方法在估计精度方面比Novey的方法具有一定的优势;在耗时方面,基于复信号峰度的方法比Novey的方法则具有显著的优势。
5 基于复值统计信息的单通道SAR舰船目标检测部分研究结果
作者研究小组在基于复值统计信息的单通道SAR图像舰船目标检测和分割等方面进行了初步研究[21,22,74,75],结果表明采用单通道复值SAR图像进行舰船目标检测可以更好地利用复值信息,可以有效缓解传统基于幅度图像进行检测产生的一些问题。部分最新研究成果和结论如下。

图12 Novey的方法和基于复信号峰度的方法的均方误差结果对比Fig.12 MSE results of Novey’s method and our method

图13 Novey的方法和基于复信号峰度的方法的单次估计平均时间消耗对比Fig.13 Average time consumption comparison for a single test of Novey’s method and our method
5.1 基于复信号峰度的复杂环境背景舰船目标检测
针对复杂环境背景下的舰船目标检测问题,文献[21]根据复信号峰度对海杂波和舰船目标敏感的优点,设计了一种基于复信号峰度的舰船目标检测方法。其检测基本原理是海杂波的复信号峰度在不同分辨率、波段、极化、入射角成像参数条件下近似恒定,维持在0附近一个较窄的区间内[21],如图14(a)所示,这和其幅度或强度在不同成像条件下的巨大变化有明显区别,如图14(b)所示。而舰船目标呈现出和海杂波完全不同的复信号峰度特性。舰船目标的复信号峰度在很大一个区间内剧烈变化并且远大于0,如图14(c)所示(此处舰船目标样本来源于经OpenSARShipFilter工具[76]过滤后的OpenSARShip数据集[77,78])。因此通过设置一个全局阈值即可以有效检测舰船目标,这种性质非常有助于海洋背景中舰船目标的快速筛选,例如可以较好地克服宽幅SAR图像入射角变化带来的辐射不均衡问题。
此外,欧盟JRC的Santamaria等人[79]通过SUMO软件对地中海地区超过1万幅的Sentinel-1图像进行批量舰船目标检测时,发现由于受到射频干扰的影响,结果中存在大量虚警,不得不舍弃其中不少数据或者特定地区的数据。Sentinel-1中的射频干扰如图15所示。文献[22]对舰船目标检测中的射频干扰鉴别问题进行了研究。通过分析舰船目标和射频干扰产生机理的不同,文献[22]发现了射频干扰复值信息的两个特点,即射频干扰呈现非常弱的非圆性并且主要呈现亚高斯性,而舰船目标呈现强非圆性和超高斯性;其虽然和舰船目标具有近似的强度,但是其非圆性和非高斯性却截然不同。因此通过非圆性和非高斯性等复值特征的判断可以有效区分射频干扰和舰船目标等人造目标[22,70]。文献[22]中提出的基于非圆性和非高斯性方法的总体精度为97.94%,而基于幅度图像纹理特征的SVM方法精度仅为88.91%,说明了复值信息的有效性。
文献[21]中提出的基于复信号峰度的方法可以较好地结合非圆性和非高斯性,通过对多种典型复杂环境场景进行实验,结果表明基于复信号峰度的检测方法可以有效减少射频干扰引起的虚警,同时减轻方位模糊造成的影响。此外,提出的方法能够有效检测密集目标状态下的舰船目标,要优于传统基于幅度图像的CFAR检测方法。更多细节可参考文献[21,22]。

图14 不同成像条件下海杂波和舰船目标的复信号峰度对比Fig.14 CSK plots of sea clutter of typical sea clutter and ship targets from different acquisitions
5.2 结合幅度信息和复信号峰度的鲁棒舰船目标迭代分割

图15 Sentinel-1图像中的射频干扰现象(绿圆表示舰船目标)Fig.15 Ships affected by RFIs in Sentinel-1 images (The green circles represent ships)
针对单通道复值SAR图像舰船目标分割问题,文献[21,75]中提出了一种结合幅度信息和复信号峰度的舰船目标复值图像鲁棒迭代分割方法。
其分割原理为:设有一个同时包含舰船目标和海杂波的舰船切片,首先假设海杂波的实部和虚部都服从高斯分布,同时只考虑海杂波中的实部或虚部及其对应的实信号峰度。不妨以正态分布为例,如图16(a)所示,可以看出,对于高斯分布而言,较小的点集中在0附近而较大的点是分散的。由于实信号峰度值的大小更多地取决于离群值而不是峰值的[80],因此,当幅度阈值t很小时(如0.5倍幅度均值),包含点的分布的离群倾向弱于高斯分布,此时实信号峰度小于0;当阈值t不断地增大时,包含的离群点越来越多,这个分布的离群倾向越来越强,此时实信号峰度会不断增大,如图16(b)所示;最后,当阈值t增大到理想的分割阈值t*时,此时这个分布是一个包括了所有点的高斯分布,因此实信号峰度等于0。总结起来,当阈值t由一个很小的值变化到最终的阈值t*的过程中,实信号峰度的值将由–1.2 (其实质为均匀分布的实信号峰度,注意高斯分布的顶部局部区域可近似为一个均匀分布)变化到0(即高斯分布的实信号峰度)。由于舰船目标的像素值通常远大于海杂波或者说相较于海杂波离群倾向更明显,因此迭代过程在包含舰船目标像素之前就会终止;否则,实信号峰度的值将会大于0。
提出的迭代分割方法实际上可以归纳为一种从混合信号(高斯信号和超高斯信号)中提取高斯信号的方法。在提取高斯信号的过程,同样得到了超高斯信号,整个过程完成了舰船目标和海杂波的分离。因此,提出的方法也可以单独作为一种从SAR图像自然背景中分割人造目标的方法。不同于常规的SAR图像阈值分割方法,该方法能够有效利用SAR图像中海杂波的复值信息,从而确定合理的分割阈值,直接对复值SAR图像进行分割。更多细节可参考文献[21,75]。

图16 高斯分布迭代分割过程的示例Fig.16 Illustration of the iteration process for a Gaussian distribution
图17展示了对部分Sentinel-1 SM和高分三号UFS模式舰船目标复值切片进行迭代分割的结果,并和经典的Otsu图像分割方法进行了对比。Otsu图像分割方法源于对普通光学图像的应用,在SAR图像分割中其应用对象通常是16位幅度图像拉伸映射后的8位图像。由结果可以看出,迭代分割方法的结果更加稳定和可靠;而Otsu方法容易过分割,特别是对高分三号UFS模式这种高分辨率数据中的一些杂波动态范围比较大的切片。总的来说,Otsu方法的效果非常依赖于拉伸映射后的8位图像质量,而提出的迭代分割方法可以有效利用SAR图像目标和背景复值统计特性的区别,结果更加地鲁棒。
6 结束语
本文面向舰船目标检测,较为全面系统地综述了单通道复值SAR图像统计建模方法。不同于传统惯例着重于单通道SAR图像幅度统计建模方法的研究,本文重点对单通道SAR图像相位和复值统计建模方法进行了研究,同时有针对性地介绍了作者研究小组的一些最新研究成果。随着SAR图像分辨率的提升以及对舰船目标检测性能要求的提高,本文研究将对理解单通道SAR图像的复值本质特性及其应用具有重要意义,同时对促进相关研究者的工作具有积极作用。但是关于单通道SAR图像复值信息挖掘及其应用需要进一步深入研究的还有很多,主要包括以下3个方面:
(1) 超高分辨率单通道SAR图像复值信号处理。目前,国内外已有多部机载SAR系统具有亚米级分辨率成像能力。例如,中科院毫米波机载系统可以获得0.15×0.15 m的分辨率[34,35],国外MEMPHIS系统[81]可以获得0.06 m的超高分辨率,同时星载SAR系统的分辨率也在不断提高。随着SAR分辨率的提高,完全发展的相干斑的假设条件变得更加地不适用。超高分辨率SAR不仅可以获取目标更丰富的幅度信息,其蕴含的复值信息如非圆性等也将在目标识别领域发挥更重要的作用。发展超高分辨率单通道SAR图像复值信号处理方法和理论具有重要的研究意义,对充分释放超高分辨率SAR的应用潜能具有重要作用,是一个值得研究的发展方向。
(2) 单通道复值信息和多模式SAR图像处理。单通道复值信号处理侧重于对单通道SAR图像本身复值信息的提取,而随着未来SAR技术的进一步发展,方位向多通道的宽幅高分SAR、MIMO-SAR、双/多基SAR、多极化SAR、干涉SAR、TomoSAR、视频SAR等多模式SAR[3,4]都不再局限于单通道SAR图像。单通道SAR图像复值信号处理可被认为是多模式SAR图像处理的重要基础组成部分,因此通过单通道SAR图像复值信息提取有助于促进多模式SAR图像处理,同时多模式SAR图像处理也有助于促进单通道SAR图像复值信息处理方法在多种应用场景中的突破,具有非常广阔的发展空间。
(3) 单通道复值SAR图像解译和深度学习。以卷积神经网络为代表的深度学习在光学图像目标检测识别中取得了令人瞩目的成绩。但是SAR图像成像机理和传统光学图像存在显著差异,图像特征差异也非常明显,直接套用光学领域的深度学习方法在SAR图像解译领域性能受到极大限制。作为SAR图像区别于光学图像的一种本质特征和根本区别,SAR图像的复值信息将有助于深度学习实现更有效的特征表达和数据驱动,是一个非常重要的突破口。将复值SAR图像解译和深度学习进行有机融合是一个非常有前景的研究方向,有望成为突破SAR视觉智能解译瓶颈的重要途径。
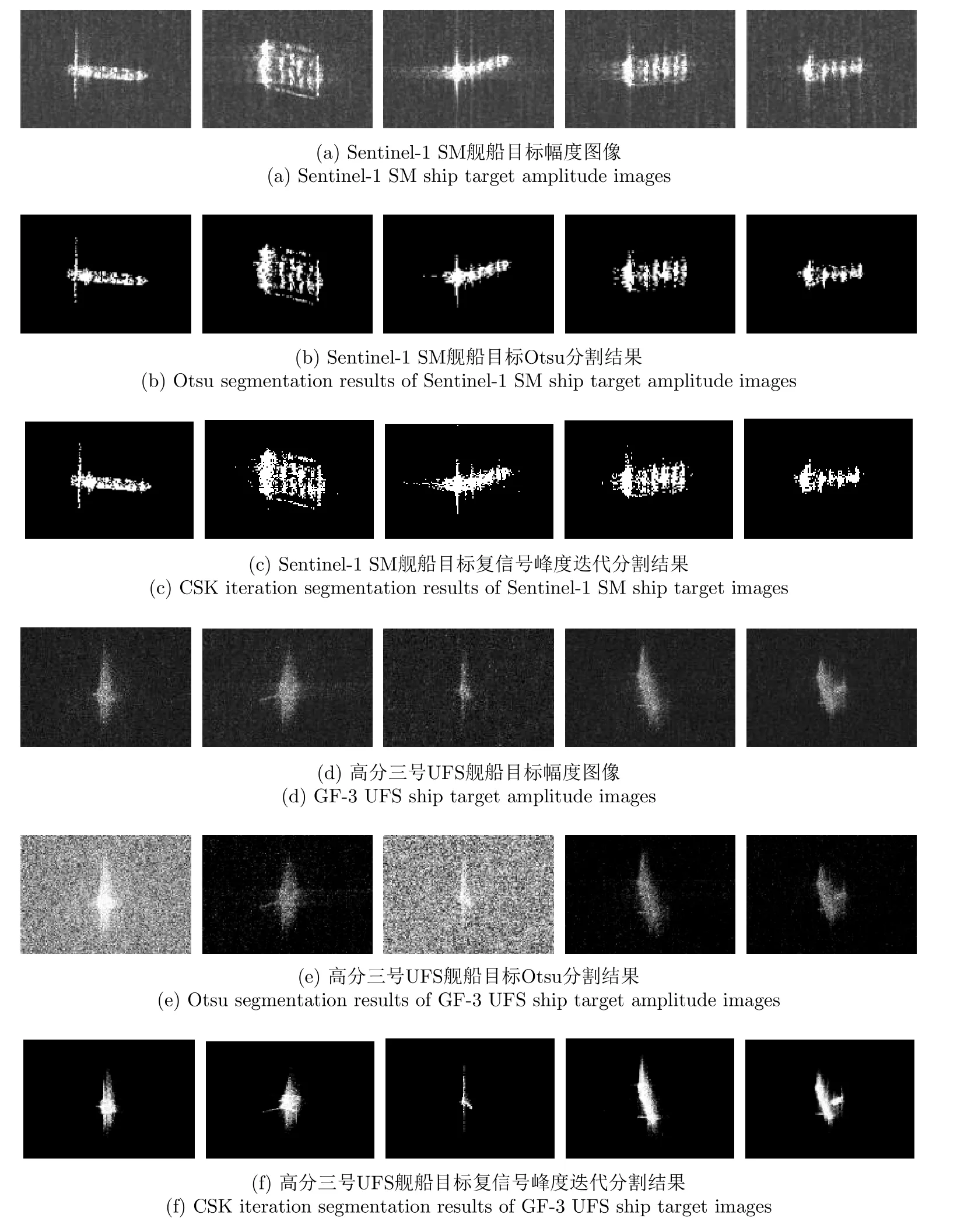
图17 舰船目标切片复信号峰度迭代分割和Otsu分割对比结果Fig.17 Comparison of Otsu and CSK iteration segmentation results