全息合成孔径雷达的概念、体制和方法
2020-07-13丁赤飚仇晓兰吴一戎
丁赤飚 仇晓兰 吴一戎
①(微波成像技术国家级重点实验室 北京 100190)
②(中国科学院空天信息创新研究院 北京 100190)
③(中国科学院电子学研究所苏州研究院 苏州 215123)
④(中国科学院大学 北京 100049)
1 引言
微波成像是以微波作为信息载体的一种成像手段,相比光学成像而言,微波成像具有全天时、全天候、具备一定穿透能力等特点。因此,微波成像是对地、对空探测不可替代的主要手段。
微波成像包括微波辐射成像和微波散射成像两个大类。其中,微波辐射成像是通过接收物体自身在整个电磁波频谱中某个微波波段的热辐射来得到物体的微波辐射图像,是一种完全被动的成像体制。微波散射成像,则是通过接收物体对某个发射源所发射微波信号的散射信号,来实现对物体的成像。发射源和接收机可以位于同一个平台、也可以位于不同平台。发射/接收位于同一个平台的,通常称为主动成像设备;位于不同平台的,接收方是被动成像,但就整个成像系统而言,依然属于主动成像。相对于微波辐射成像而言,微波散射成像具有更大的灵活性和可控性,其应用也更为广泛。因此微波成像技术更多是指微波散射成像技术。
微波散射成像(后文中简称微波成像)技术最初只实现一维成像,也即只在距离向具有高分辨率,在方位角上分辨率很低,这便是传统的雷达(Radar:Radio detection and ranging)技术。合成孔径雷达(Synthetic Aperture Radar,SAR)技术是雷达技术史上的一次革命,实现了一维高分辨距离探测到二维高分辨成像的跨越。
自1951年Carl Wiley提出合成孔径的基本概念以来,经过近70年的发展,各种先进的地基SAR、机载SAR、星载SAR相继成功研制,取得了重大的应用成果[1–6]。尤其进入本世纪以来,SAR在实现机理、系统形态、技术体制、处理方法、成像效果乃至信息提取等方面,发生着深刻的变化[7]。文献[7]从大时间尺度和宏观视角,对雷达对地成像技术演化趋势和规律给出了深入分析,并指出SAR孔径流形由直线演化出曲线状和面状、并向多曲线交织的立体状演进,系统形态由单基演化出双多基、并向群多基形态演进等趋势。文献[8]提出了多维度SAR的概念,首次规范、科学地定义了多维度和多维度观测空间,在多维度概念下统一了SAR体制,并建立了 SAR 工作方式的多维度表述及多维度数的定义方法。其指出,SAR已经从二维高分辨率、干涉高程测量(二维半),发展到三维成像,从极化、角度、频率单一观测维度的延伸,发展到极化干涉、圆迹层析SAR等多个观测维度的综合,并指出未来SAR成像体制向着更高维度发展的趋势。
那么,未来更高维度SAR以及发展到极致状态的全维度SAR体制,应该如何定义呢?本文受到物理学中“全息原理(Holographic principle)”[9]的启示,提出“全息SAR”的概念。
实际上,微波全息、全息雷达、全息SAR等名词,已经有不少研究者使用过。早在上世纪90年代,美国休斯顿高级研究中心Byrd等人[10]就提出了三维微波全息图(3D microwave holography)的概念,并搭建了一个全息成像设备(Holographic imaging facility)在暗室中开展了实验[11]。该设备是一个双站SAR系统,发射机可以沿高度向移动,接收机可以在高度向和方位向移动,实验中对于暗室中心实验台上的目标进行了360°方位角、45°~90°的俯仰角、以及不同双站角下2—40 GHz的测量,获得了多角度的三维成像结果。1994年,复旦大学学者发表的题为“航天微波全息雷达”的文章[12],其中介绍的微波全息雷达可以看成是一个阵列干涉SAR,其对返回的散射波前进行足够的二维取样,实现地物重建。波兰学者KRZYSTOFIK[13]在2000年微波、雷达和无线通信的国际会议上发表的题为“Microwave Holography”的文章中,则将微波全息测量技术定义为是一种特殊形式的双基地连续波逆合成孔径雷达(ISAR)成像技术,其用微波信号获得全息图的过程类似于用激光产生光学全息图的过程。
近些年来,在探地雷达领域,也有研究者使用了全息雷达这个名词。莫斯科国立鲍曼技术大学遥感实验室研制了名为RASCAN的全息探地雷达系列[14,15],该系列的全息探地雷达具有一个发射天线和两个正交的接收天线,用来形成二维干涉图或其所称的全息图,从而得到不同高度层的成像结果。多国学者联合发表的文献[16]中,也介绍了一种全息探地雷达,并提出了一种生成地埋物体的高分辨率平面图像的算法。
在SAR领域,现有命名为全息SAR层析成像的体制通常又称多基线圆迹SAR(Multi-Circular SAR,MCSAR)。德国宇航局O.Ponce等人[17,18]报道其机载实验的时候,在最初2012年的EUSAR和IGARSS会议论文中使用的是多基线圆迹SAR,后来逐渐将该成像体制称为Holographic SAR tomography 简称HoloSAR[19]。国内研究者也大多沿用了上述名词,翻译成多基线圆迹SAR或全息SAR,中科院空天院、国防科大、西电、成电等许多单位均开展了相关技术的研究,在成像算法、实验验证等方面取得了丰硕成果[20–26]。
由上述现状可见,虽然“全息”这个名词在雷达成像领域被许多研究者提及和应用,但其概念既不清晰也不统一,很难理解“全息”的本质并与其他相关体制雷达进行区分。为此,本文从多维度SAR的理论框架出发,借鉴物理学中全息原理的相关概念,首次给出了全息SAR的明确定义并建立了全息SAR的信号模型和处理框架,指出全息SAR体制是未来发展的重要方向。
本文后续内容安排如下:第2节给出了全息SAR的概念和定义,描述了全息SAR体制,指出了其与多维度SAR的联系与区别;第3节建立了全息SAR的目标特性模型和信号模型,并在一些基本假设下给出了初步的成像反演处理框架,进一步讨论了全息SAR成像的本质和后续研究重点;第4节进行总结和展望。
2 全息SAR的概念与体制
2.1 概念与定义
微波成像领域中现已引入的全息概念大多源自光学中的全息照相技术,或称“全息术”(Holography),特指一种记录被摄物体反射(或透射)光波中全部消息(振幅、相位)的照相技术,物体反射或者透射的光线可以透过记录胶片实现立体重建。1948年,英国匈牙利裔物理学家丹尼斯·盖伯[27]发明了全息术,并因此项工作获得了1971年的诺贝尔物理学奖。图1给出了典型的反射全息照相的原理示意图。
可见,全息照相技术中的“全息”,主要指相较于以往照相技术只记录振幅信息而言,全息术利用相干参考光实现了光波振幅、相位信息的完整记录,记录信息更加全面。另一个附加特点是,由于全息术记录了相位信息,可以实现物体的立体重建,因此人们也习惯于将全息和三维联系在一起,“三维”已成为被大家广泛认知的“全息”基本属性之一。从这些特点来讲,InSAR就可以认为是一种全息微波成像技术。文献[10–15]中微波全息、全息雷达的概念也主要基于其记录微波幅度、相位实现三维重建的特点。而文献[17–19]中的HoloSAR则还包含了方位向全角度的意思,信息更加全面。

图1 反射全息照相技术原理示意图Fig.1 Schematic diagram of reflection holography
实际上“Holography”的词根“holo”是“完全”的意思,物理学中的“全息原理”(Holographic principle)[9,28]就是采用了这个本意。全息原理描述了一个空间的性质可编码在其边界上,例如事件视界的类光边界,或者说,认为一个系统原则上可以由它边界上的一些自由度完全描述。全息原理的灵感来源于黑洞热力学,其认为:所有落入黑洞的物体信息内容可能会被完全包含在事件视界的表面波动中,也就是所谓的“世界是一幅全息图”[29]。
受到全息原理的启发,本文将全息合成孔径雷达(Holographic SAR)定义为:以SAR为基本观测方式,在某个有限的空间范围内制造电磁散射场,并记录该空间某种边界上的完备信息,从而实现三维空间几何坐标系下目标电磁散射特性(频率、极化、角度、时相)完全反演重构的SAR系统。根据上述定义,全息SAR是一种高维度、高复杂度的SAR系统体制,其目的是要实现观测空间内目标电磁特性的完全重构,其核心基础是全息SAR系统各个观测单元之间的高精度相参性,也即要保证所制造和记录的电磁散射场具有统一的时空基准。上述定义特别强调,全息SAR首先要能够实现几何三维分辨成像,这不仅符合人们对于全息概念的普遍认知,更是因为只有基于三维空间坐标系,目标特性才能够以无失真的自然方式呈现出来。
2.2 与多维度SAR的关系
本文所定义的全息SAR与文献[8]所定义的多维度SAR有密切关联,是文献[8]所定义多维度SAR模型框架下的一种具体而高级的实现体制。
多维度SAR强调“多”,要求极化、频率、角度、时相构成的4维观测空间内,至少有2个维上的观测度数大于1。例如极化干涉SAR、多波段极化SAR等都是多维度SAR。文献[8]中定义的多维度SAR只需在观测维度上满足“多”的条件,并不要求在维度上的观测量一定是相参的、完备的,比如多波段极化SAR,波段与波段之间的信号可以没有统一的相位基准。
本文的全息SAR则强调“全”,目的是在多维度SAR已定义的所有观测维度空间上能够完全重构目标特性。因此,理论上全息SAR要满足两个条件:(1)在“维”上,是全维度SAR,即在时间、频率、角度、极化的每个维上的观测度数都大于1;(2)在“度”上,每个维的观测度数需要像满足奈奎斯特采样定理、或稀疏假设下的采样条件一样,达到一定的数量和条件要求,或称完备性要求,以实现在该维上目标特性的完全重构,其中包括了对散射中心三维空间位置的重构,即三维成像。
实际中,通常做不到上述全息观测,我们补充给出一个简缩全息SAR的概念。简缩的目的是为了工程实现,但同时还必须保留“全息”的重要特征。概括起来,简缩全息SAR要满足3个条件:(1)是一个三维SAR,继承全息SAR的基本属性;(2)是一个多维度SAR,即在时间、频率、角度、极化的观测维上至少有两个维的观测度数大于1;(3)至少在1个维上能够实现完备观测。
从上述定义上可看出,全息SAR是多维度SAR的一个高级特例,增加了三维、观测维度上具有完备性的条件限制。另外需要说明的是,本文为了更好地考虑双/多站SAR的情况,也即全面考虑目标的后向散射和非后向散射,将文献[8]的角度维拆成入射角和散射角两个子维,考虑到上述两个角度对于散射特性描述的重要性,在计算双/多站SAR的多维度数时,将入射角和散射角独立考虑。
2.3 全息SAR体制

图2 典型的全息SAR系统体制Fig.2 Typical holographic SAR system
一种典型的全息SAR系统体制构想如图2所示。在该全息SAR体制中,发射(Tr)和接收(Re)系统均采用全极化天线,发射信号为水平和垂直两种极化的全波段相参宽带信号,各系统单元之间完全相参。其中绿色的发射阵列通过时分或不同调制信号等方式发射信号,蓝色接收阵列接收信号;首先固定发射阵列和接收阵列的夹角(例如从0°~180°的某个值),以一定的角速度完成双站(夹角为0°时为单站)圆迹层析全波段全极化SAR的数据获取;然后改变双站角,进行下一次圆迹层析全波段全极化SAR的数据获取,直至遍历所有双站角;并且在一段时间内持续进行上述观测。
先不考虑具体实现技术,上述全息SAR体制实现了在极化-频率-入射角(入射方位角-入射俯仰角)-散射角(散射方位角-散射俯仰角)-时相上的完整观测,可以实现该时空四维范围内目标电磁散射特性的完全重构。
下面再给出几种简缩全息SAR的具体例子,如表1所示,其中,K,M,N,K1,K2,K3和K4等均为正整数,指代对应维上观测的度数。单波段全极化圆迹层析SAR、全波段相参全极化圆迹层析SAR、单波段全极化阵列干涉SAR持续监测系统等,这些现有研究已经涉及的SAR系统体制,都符合简缩全息SAR的定义,是简缩全息SAR体制。而文献[19]中的多基线圆迹SAR也即其称为的HoloSAR,虽然在散射方位角上是完备观测,但由于其在频率、极化、入射角、时相上的观测度数都是1,不符合多维度SAR的基本要求,因此不属于本文所定义的简缩全息SAR,或者上述HoloSAR只能称为极简全息SAR或单维度全息SAR。
3 全息SAR信号模型与处理框架
3.1 全息SAR目标特性模型
根据文献[8],在单色平面波假设下可以得到任意位置r处某个观测对象的散射场,表示为
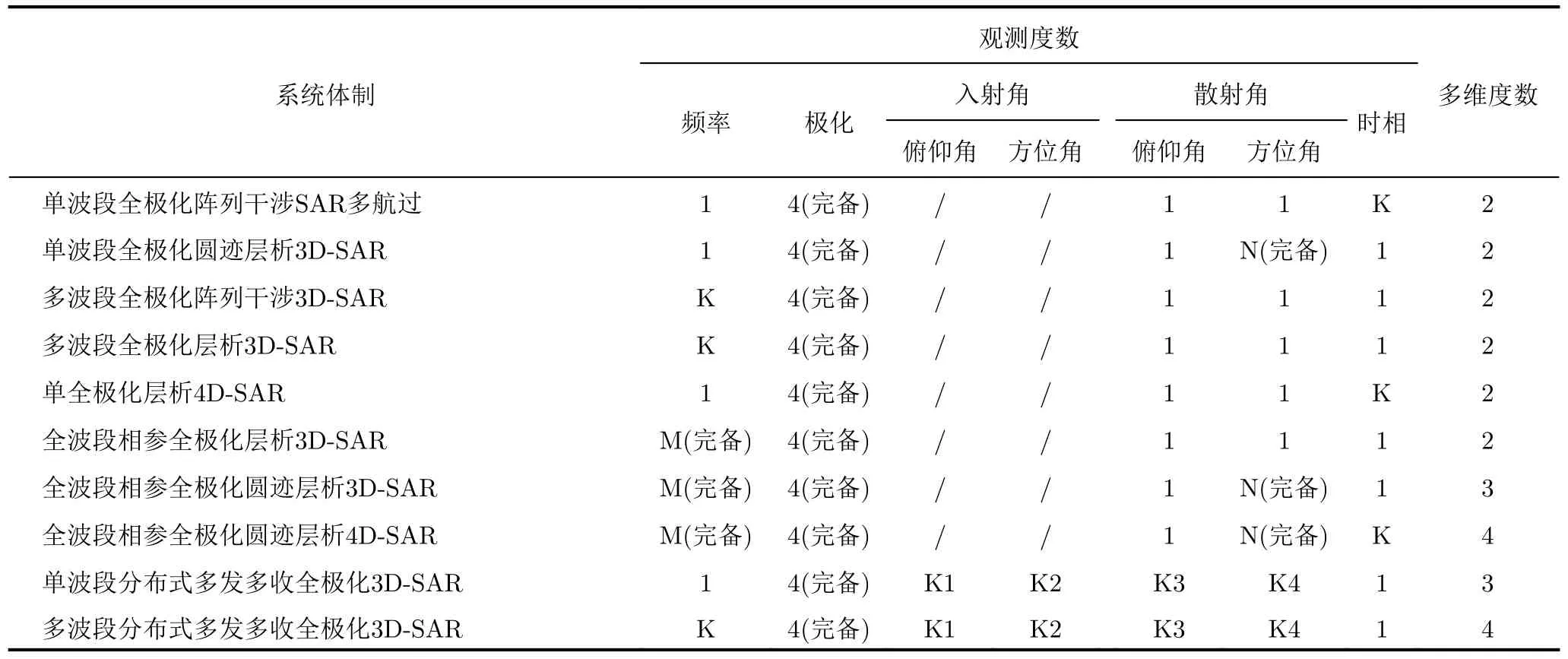
表1 简缩全息SAR体制示例Tab.1 Examples of compact holographic SAR system

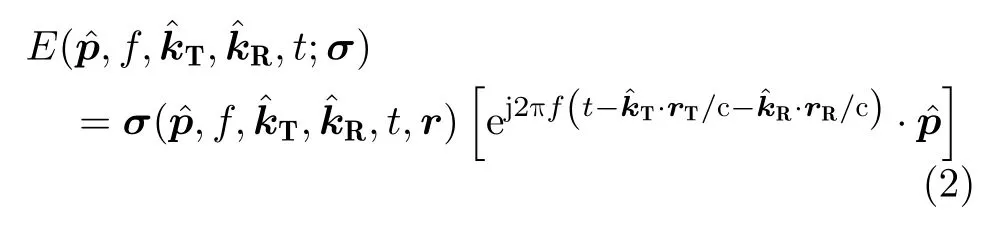
式中,f为电磁波频率;t表示传播时刻;为单位矢量,描述波的传播方向;与位置矢量r的点乘代表了波矢量在该位置的投影量;为单位琼斯矢量,表达了电磁场传播中的极化状态,为r处观测对象对入射波的2×2复后向散射系数矩阵。如进一步考虑发射接收不在同一位置的双站SAR情况,如图3所示,则接收机所探测到的散射场为

其中,θi和θo分别为入射和散射俯仰角,φi和φo分别为入射和散射方位角。则整个复波数k的空间为kT和kR的克罗内克积,也即k=kT⊗kR。因此,对于目标散射特性而言,在某个确定的下,可以用文献[8]中的多维度球簇来描述。
3.2 全息SAR信号模型与处理框架
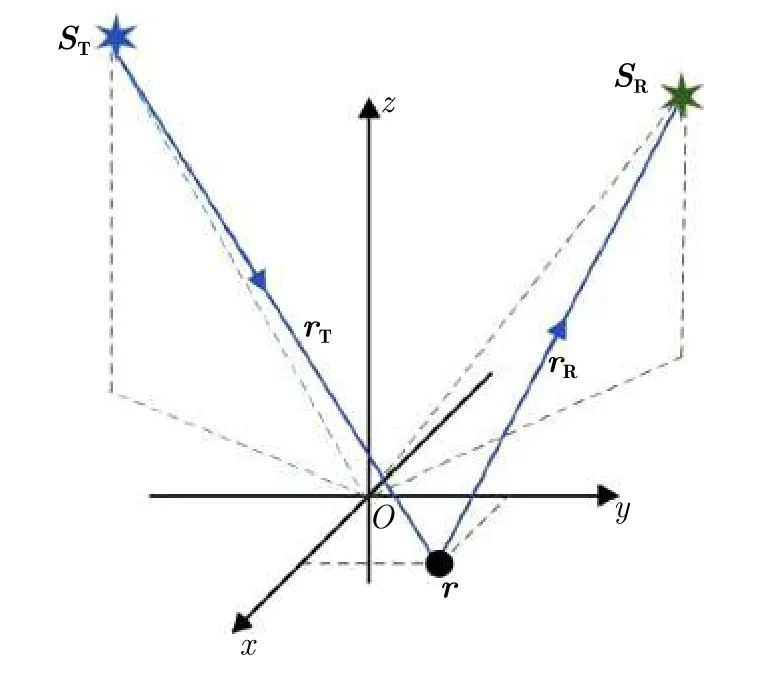
图3 双站SAR成像示意图Fig.3 Schematic diagram of bistatic SAR imaging
对于全息SAR而言,所采集的信号并非只来自单个观测对象(点目标)的散射场,在某个观测时刻,全息SAR所采集的信号是所观测空间范围内所有目标散射场的总和。对于全息SAR中的基础观测单元(某个SAR)而言,通常来说,假设目标散射特性σ在合成孔径和某个信号带宽范围内保持恒定,然后利用合成孔径处理和宽带信号压缩处理,实现二维高分辨率成像。当然,也可以在场景稀疏的假设下,实现超分辨率二维成像,然而稀疏假设下求解的变量数目有限,因此通常也假设σ在合成孔径和信号带宽内是稳定的。此外,为了能够分辨第三维上叠掩在一起的目标,现有技术采用阵列干涉[30,31]、层析[32,33]等方式在俯仰角维上获取更多的观测量,并基于稀疏假设进行第三维超分辨成像。与方位分辨同理,为了保证俯仰维观测量之间的相干性,俯仰角差异不能太大,并且稀疏假设下求解的未知量有限,因此现有层析三维成像也假设σ在俯仰角变化范围内基本恒定,这也是本文全息SAR体制将层析或阵列干涉SAR的俯仰角观测度数定为1的原因。如果层析观测的数量足够多、且跨越一段时间,则还经常考虑σ的位置变化,将变化速率作为一个未知量列入稀疏求解算式一并求解[34,35]。目前,在宽角SAR或圆迹SAR中,也已有研究者开始考虑将σ作为一个角度变化函数,基于稀疏假设进行求解[36],此时方位角的观测度数可以认为大于1。
3.2.1 基本假设
全息SAR信号模型对目标特性的一些基本假设延续文献[8]多维度SAR的假设,并增加一些稀疏性假设,具体如下:
H1:每种散射机制相互统计独立;
H2:每种散射机制的极化特征稳定;
H3:每种散射机制在某个有限带宽内的频率响应特性稳定;
H4:每种散射机制在某个有限角度内的角度散射特性稳定;
H5:每种散射机制在某个有限时间内的时相响应特性稳定;
H6:每种散射机制在某种极化、某个有限角度内、有限时间内,随频率的响应特性能够在工程应用所允许的误差范围内,用有限个基及其系数完全表征,也即频率响应特性在某组基构成的空间上是稀疏的;
H7:每种散射机制在某种极化、某个有限频带、有限时间内,随角度的响应特性在某组基构成的空间上是稀疏的;
H8:每种散射机制在某种极化、某个有限频带、有限角度内,随时间的变化特性在某组基构成的空间上是稀疏的。
H9:观测范围内,强散射机制的分布在工程允许的误差范围内,具有一定的稀疏性。
虽然地物目标散射特性非常复杂,但上述假设在工程应用的大部分情况下是成立的。基于上述假设,本文补充说明多维度SAR和全息SAR中“度”的界定方法。
极化维的度数很容易界定,即为系统采用不同极化方式的数目,如双极化SAR的度数为2,全极化SAR的度数为4,基于混合极化架构的极化SAR系统[37]则需视情况而定。
频域、角度、时相上的度数则分别根据散射机制对假设H3,H4,H5的满足情况来界定:如满足假设,也即回波信号相参,且成像处理采用相参合成方式来提高分辨率,则观测度数记为1;如不满足假设,也即回波信号已去相参,则观测反应了该维上不同的散射特性,故观测度数大于1。例如:高分辨率聚束SAR角度维观测度数为1,而圆迹SAR、多站SAR,以及SAR卫星星座或一些波束扫描能力较强的多方位角星载SAR[38],其角度维的观测度数大于1。
上述界定虽然在数学上不够严谨,但在工程上是合理的,具体应用中可以根据实际地物目标的统计模型,确定观测度数的划分标准。
3.2.2 典型体制下的重构处理框架
下面以单波段全极化圆迹层析3D-SAR为简缩全息SAR体制的典型实例来进行分析,从而探讨其对目标特性反演重构的处理问题。由于在极化维度的完备性比较容易获得,全极化已成为当前机载和星载SAR常用的成像模式。并且,虽然已有简缩极化SAR以进一步降低极化维重构所需的观测量,但即便不简缩,极化维也只需4个量就可以实现完备观测。因此,后文基于传统的4极化SAR来进行分析。
假设单波段全极化圆迹层析3D-SAR所观测的场景中有M个散射子,也即

其中,分号后面的变量观测度数已定,且在该维度上无需反演。因此,未知量包括散射子的M个位置矢量rm,m=1,2,…,M和每个位置矢量处散射子散射特性随角度的变化特性σm(φo)。根据基础假设H7,设:

其中,σp,m(φo) 是第m个散射子在极化状态p下的复数散射系数,Ψo是一组基构成的矩阵,是稀疏的系数,也是复数,设其平均稀疏度为Kφ。那么,未知量包括:
(1)M个位置矢量,也即3M个实数未知量;
(2)M ×Kφ个复系数未知量,也即2M ×Kφ实数未知量。
一共3M+2M ×Kφ个实数未知数。
为了简化分析,并不失一般性,本文从基于有限角度进行二维成像得到的二维复数图像开始分析。设每个圆迹SAR获得了N个子孔径成像结果,如果每个成像结果中M个散射子都能分辨,那么将得到N ×M个观测。但是,在每个子孔径图像中,因方位分辨率低、且不具备第三维分辨能力的原因,M个散射子中会有一些散射子落入同一个像素。不妨假设每个子孔径图像中只能得到M1(M1≤M)个独立观测,并且其中只有M1ind个观测是只含一个散射子,剩下M1-M1ind个观测含多个散射子。设层析的层数为L,那么该单波段全极化圆迹层析SAR在某个极化上获得的观测样本数目为L×N ×M1。对于每个观测样本,可以获得其对待求未知量的信息包括:
(1) 每个子孔径图像中,M1ind个只含一个散射子的独立观测量,获得了该散射子位置矢量的2个自由度方程(距离-多普勒方程)和散射系数随角度变化的1个采样;也即一共4×M1ind个实数方程;
(2) 每个子孔径图像中,M1-M1ind含多个散射子的观测量,设平均每个观测量含d个散射子,也即d×(M1-M1ind)+M1ind=M,则每个观测量能获得1个关于散射系数的复数方程和2个关于观测像素位置的实数方程;一共4×(M1-M1ind)个方程。
为此,一共能够获得L×N ×M1×4个实数方程。原则上,必须满足L×N ×M1×4≥3M+2M×Kφo,方程才能有唯一解,才能实现目标特性的完全重构。
上述是一个简化的概念性分析,并且是沿着传统处理思路进行的分析。传统SAR成像处理,往往将二维成像和第三维成像独立进行,例如Tomo-SAR处理总是先进行二维成像再进行斜高向的解叠掩分辨;将二维成像和角度特性获取独立进行,例如圆迹SAR处理时往往先进行子孔径成像,然后对子孔径图像进行融合分析等方式获得目标的角度散射特性。这样的处理方式,相当于将SAR所获得的各个维度相互耦合的高维观测量,先在某个二维投影面(主要是斜距-方位成像平面)进行投影,降低观测量之间的耦合程度(例如成像平面的方位-距离向耦合在成像算法内部进行了去除),然后再从所得的一系列解耦投影结果中,挑选既定目标或既定位置相关的数据进行其他维度的解算。这种先投影到二维成像平面的处理方式,虽然大大降低了处理的复杂度,但同时也带来了诸多弊端。首先,不同观测投影之间的数据关联难度很大,可能会导致后续维度处理时信息缺失。其次,难以对SAR获得的高维观测数据进行最优化的综合利用。
为此,本文从SAR原始回波出发,建立全息SAR目标特性反演重构的一体化处理框架。仍以前述简缩全息SAR(单波段全极化圆迹层析3D-SAR)为例,某个极化状态下,成像模型可以描述为

其中,y是简缩全息SAR获得的所有观测样本(也即回波采样值),按一定顺序重排后的一维向量;A是观测矩阵,也即描述成像传递函数的矩阵;n是 一个与y相 同维度的噪声向量;σ为在成像区域内三维空间按照期望分辨率划分网格后,由每个网格散射系数随角度变化的向量,组成的一个长向量。更加具体一点的表达为
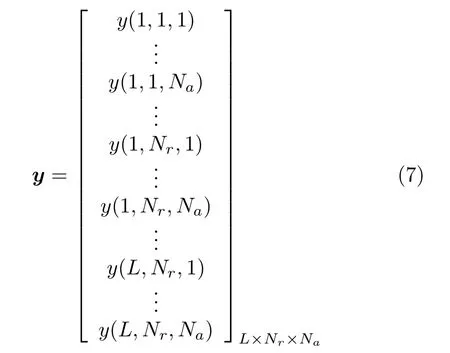
其中,Na,Nr分别为方位向和距离向采样点数,L是层析层数。
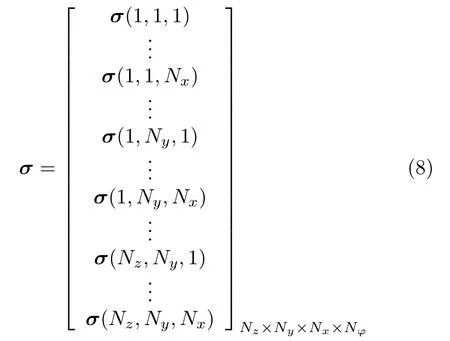
其中,Nz,Ny,Nx为空间3个方向划分的网格数,网格的划分在不同方向可以不同,Nφ为散射方位角划分的网格数,式中每个元素为:σ(i,j,k)=。
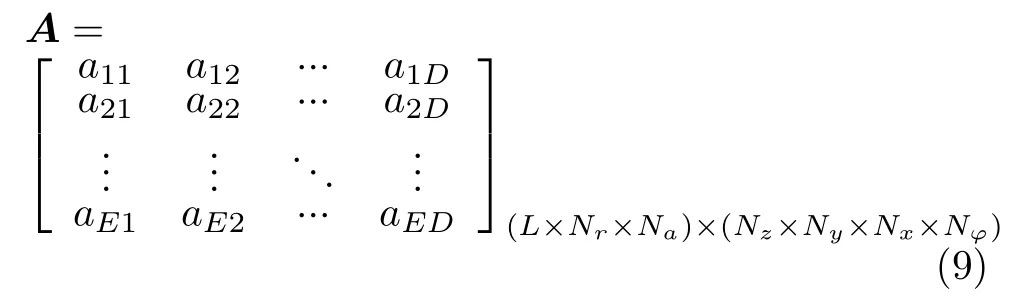
其中,E=L×Nr×Na,D=Nz ×Ny×Nx×Nφ,每个元素为

上述元素代表i所对应的雷达所处位置(雷达方位角位置、俯仰角位置)获得的i所对应距离像素的观测量,所受到的来自j所对应三维网格位置处目标在该角度下散射的贡献。其中G(i,j)表示考虑方向图、距离压缩后旁瓣效应在内的加权系数,r(i,j)为j所对应网格目标位置到i所对应雷达位置之间的距离。
全息SAR成像就转变成对式(6)进行基于稀疏约束的最优化方程求解问题。如果目标在三维空间分布的稀疏度为M,那么要求L×Nr×Na >M ×Kφ,才有可能实现稀疏重构。基于式(6)—式(10),利用稀疏重构的基本原理和方法,理论上可以实现M ×Kφ稀疏的目标特性的完全重构。
上述给出了单波段全极化圆迹层析3D-SAR这种简缩全息SAR体制的信号模型和反演重构处理框架,其他简缩全息SAR体制乃至全息SAR体制的信号模型和处理方法也可在此模型框架下进行推演。
3.2.3 全息SAR成像本质的进一步讨论
需要进一步强调指出,本文提出的全息SAR信号模型和一体化信号处理框架,与传统SAR成像模型有2个方面的显著不同。
第一,全息SAR信号建模和解空间直接构建在完备的全息目标特性空间上,通过一体化求解,可直接实现三维几何模型上全息电磁目标特性的重构。而传统SAR成像,信号建模和解空间构建在全息目标特性的某个投影子空间上(如某个观测角度下的二维距离多普勒平面),这种降维投影导致的多目标混叠,使得精确全息目标特性重构非常困难。
第二,全息SAR成像框架是一种基于稀疏约束的最优化模型。这种模型可以自然地将不同传感器、不同时相/频率/角度/极化等观测参数下的观测数据整合在一起,实现“大数据”观测条件下的最优处理,相比传统SAR,具有显著的性能提升潜力。
正是这两个特点使得全息SAR可定义为一种新的SAR技术体制,成为SAR成像技术发展的重要趋势。本文给出的信号模型和处理框架还非常初步,但其为后续进一步深入研究提供了参考框架。全息SAR及其反演重构处理还需开展大量深入的研究工作,包括但不限于:
(1) 全息SAR的全系统高精度相参问题。为了能够利用全息SAR各个观测量对目标散射特性进行完整重构,需要各个观测量在时相-频率-角度-极化观测空间具有统一的高精度基准。如何保持分布式系统各个单元以及各个波段之间信号的相参性,是全息SAR系统研制需要解决的关键问题。
(2) 全息SAR观测构型的优化问题。全息SAR观测量仅仅满足数量大于目标特性稀疏度是远远不够的,还需要观测矩阵A具有列向量原子弱相关等一系列良好的特性[39],才能实现反演重构逆问题求解。这就要求全息或简缩全息SAR在观测样本获取时进行系统构型和参数的优化设计。相关工作可参考文献[40]中阵列SAR三维成像构型优化设计的一些考虑。
(3) 巨型观测方程的可靠求解问题。当前SAR成像、SAR三维成像的观测方程已经非常庞大,全息SAR的观测方程因维度增加和完备性要求,将进一步急剧增大,变成巨型方程。稀疏约束下巨型方程求解的可行性和收敛性等理论问题需要研究,求解高效性等工程实现问题也需要突破。
(4) 目标特性在角度、频率维的稀疏表征问题。如果不进行稀疏假设而进行目标特性的完整重构,在工程实现上是不太现实的,但目标的电磁散射特性在角度和频率维的变化又非常复杂,如何能够面向工程实用找到合适的基空间进行有效降维,从而实现全息目标特性重构,也是需要研究的关键问题。
4 结束语
综上,合成孔径雷达技术经历了二维SAR、二维半SAR(InSAR)、三维SAR,已发展到如今的多维度SAR,并正朝着更高维度更复杂的体制发展。本文面向SAR系统发展的前沿趋势,提出了全息SAR的概念并首次给出了明确的定义,指出了该定义与现有全息雷达、多基线圆迹SAR、多维度SAR等概念的区别与联系。进一步,基于现有多维度SAR模型框架,建立了全息SAR的目标特性模型和信号模型,提出了初步的全息目标特性反演重构处理框架,为全息SAR技术的发展提供了初步的理论和技术框架基础。
全息SAR是SAR发展的重要趋势,也是全息目标特性探测、电磁环境探测感知等应用迫切需要的技术手段。随着三维SAR、小/微型化SAR、MIMOSAR、分布式SAR等技术的飞速发展,以及授时精度、时空基准精度的不断提升,通过天-空-地联合组网,实现某探测空间内全息目标特性的完全重构,将逐步成为可能。此外,本文提出的全息SAR概念和特点具有一定的普适性,可以进一步推广,引出全息微波成像乃至全息电磁成像的概念。