关于GPS-RTK技术在港口码头测量中的应用研究
2020-07-09孟晓辉

摘 要:近年来我国海洋开发进展迅速,大型化和深水化的建设和发展随之不断推进,大量新技术的引入和应用成为行业关注焦点,相关理论研究和实践探索受此影响也大量涌现。基于此,文章研究了GPS-RTK技术在港口码头测量中的具体应用,并围绕港口码头测量中该技术的典型应用开展深入探讨,具体涉及多波束测深系统、HYPACK软件等内容,通过相关技术的实际应用,证实该技术能够较好地服务于港口码头测量。
关键词:港口码头测量;GPS-RTK;水下地形测量
中图分类号:P228.4;U652 文献标识码:A 文章编号:2096-4706(2020)21-0138-03
Research on the Application of GPS-RTK Technology in Port and Wharf Survey
MENG Xiaohui
(Security Team of Beihai Branch of China Coast Guard,Qingdao 266000,China)
Abstract:In recent years,with the rapid development of Chinas marine development,the construction and development of large-scale and deep-water are constantly promoted. The introduction and application of a large number of new technologies have become the focus of the industry,and the relevant theoretical research and practical exploration are also emerging. Based on this,the article studies the specific application of GPS-RTK technology in port and wharf survey,and carries out in-depth discussion on typical application of this technology in port and wharf survey,specifically involving multibeam bathymetry system,HYPACK software and other contents. The practical application of relevant technologies proves that the technology can better serve the port and wharf survey.
Keywords:port and wharf survey;GPS-RTK;underwater topographic survey
0 引 言
海洋测量可为舰船航行安全提供海图等基础数据,笔者基于实际工作需求,对GPS-RTK技术进行研究,以期更好地对陌生海域码头或者地形、水深不明、疏浚工程完工后等资料不全的码头进行地形或水深测量,为笔者所在单位舰船进出港、离靠码头提供海图资料,保障航行安全。GPS-RTK作为动态实时测量技术,在港口码头测量中的实用性较高,具备精简测量流程、提升数据采集效率、提升测量可靠性等优势,但结合实际调研可以发现,港口码头测量中GPS-RTK技术的应用存在一定难度,故本文围绕该技术的典型应用展开具体研究,为可能保证该技术的应用质量。
1 GPS-RTK技术概述
港口码头测量中GPS-RTK技术的特点可细分为五个方面:
(1)精简测量流程。GPS-RTK技术在测量中的应用能够开展一体化作业,室外工作的强度受此影响能够实现显著下降,放样工作也能够在短时间内完成。
(2)突破逐级控制、分级布网限制。通过一次性完成单个测区的布设,灵活性更高的控制网和数量更少的控制点能够有效降低工作难度,碎部测量作业可在图根加密控制的同时完成。
(3)较高的碎部量测灵活性。GPS-RTK技术在应用中不会受到图幅便捷带来的限制,分幅与接边处理可基于计算机快速完成,具备较好的灵活性。
(4)较高的数据采集效率。画草图环节可在技术应用中省略,辅以特定的各个碎部点格式赋予,数据即可更好的由测图软件识别,图形编辑效率自然可随之有效提升。
(5)提升测量可靠性。1:500图根控制的精度要求可较好由GPS-RTK技术满足,过度集中误差引发的问题也能够有效规避,同时该技术在大比例尺测图中也有着不俗表现[1]。
2 港口码头测量中GPS-RTK技术的具体应用—— 以水下地形测量为例
2.1 测量方式选择
GPS-RTK技术在港口码头水下地形测量中的应用较为广泛,这一测量一般会采用多波束测深声呐,同时还需要应用数据图形分析软件,由此组成的GPS-RTK水下地形测量系统可细分为三部分:
(1)功能设备。包括卫星定位系统、姿态传感器、验潮仪、声速剖面仪,这类功能设备主要负责提供平面坐标、测量船横摇等姿态数据、海区潮位和声速剖面数据。
(2)声学系统。包括多波束信号处理系统、多波束换能器阵。
(3)储存、显示、数据处理等设备和软件[2]。
在潮汐和波浪等因素影响下,需要在处理测量得到水深数据后方可真正明确某一深度基准面的水深,具体处理涉及换能器涌浪、声速、水位、吃水等校正,如单纯采用传统有验潮测量方式,由此开展的单波束或多波束测深均可能導致最终的水深测量精度受到校正影响。结合国内外相关研究和实践,笔者认为应采用无验潮水深测量方式配合GPS-RTK技术,该方式应用中的水位观测无需人为开展,观测和人工成本可有效节约,上下浮动的测量船带来影响的消除、水位校正误差的规避、即时水位的获取也可更好实现,GPS-RTK系统需要为工作中的多波束测深系统提供支持,以此向移动台发送基准站的载波相位差分值,移动台接收载波相位可随之改正,随后即可完成移动台坐标解算。为开展测量结果的精度对比,平面坐标定位实验可基于全站仪开展,以此在测量船的同一竖向点上设置全站仪目标棱镜和GPS-RTK天线,随之开展同一点坐标测量。采集测量点数据时,调度员负责统一指挥,以此完成同步的数据采集[3]。
2.2 工程实践分析
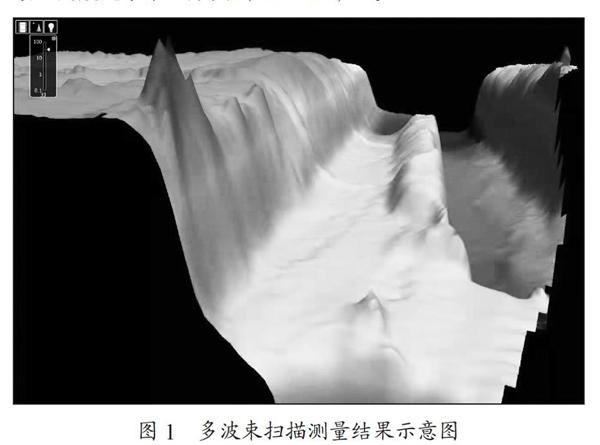
以某港航道水下地形测量为例,航道宽度、长度分别为260 m、21 km,具体测量采用1:2 000的比例尺。采用的RTK测量系统为X10,水下地形测绘用多波束测深系统Sonic2022,基于航标测量船进行工程测量,长、宽、吃水、动吃水分别为40.00 m、8.80 m、2.00 m、0.06 m。在具体测量前,坐标转换参数由RTK测量系统测定,采集软件系统中需录入水域声速剖面曲线,这一过程需使用声速测试仪,随后分别将一条平行测线设置于港口池内地势变化较大及平坦的两个区域,完成多波束安装校正,涉及艏摇、纵摇、横摇等。基于100°扫宽应用多波束测深系统,调入已定的测线和网格,运行各个仪器设备,进入测量区域的航标测量船沿已定测线航行时,测量数据即可由相关仪器设备负责实时采集,电脑负责保存形成的数据文件记录。Qloud数据采集软件和Qinsy软件需配合完成数据采集,扫测完成后,结合后期数据回放检查及现场观察,可发现存在测线覆盖良好的扫测范围控制,不存在空白区,图1为多波束扫描测量结果示意图。后续采用HYPACK软件开展后期图形处理,形成最终的航道水下地形图(1:2 000)[4]。
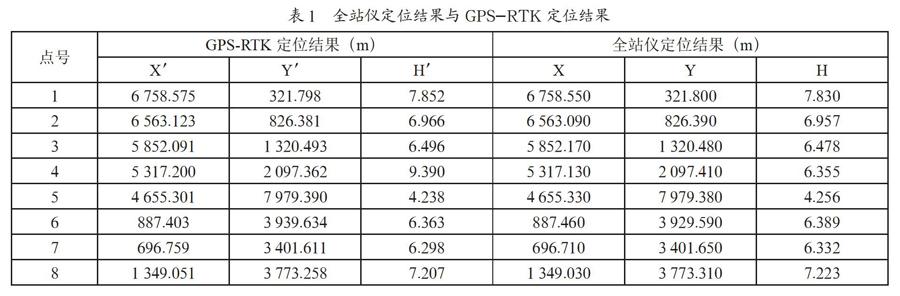
为验证上述技术应用的可靠性、准确性及高效性,可开展系统内符合验证,并对比水深测量精度误差、平面定位精度误差、工作效率高低。开展具体的验证和对比可以发现,案例工程测量小于0.3 m测深偏差的占比为100%,小于0.1 m测深偏差的占比为0.1%;对比水深测量精度误差可以发现,GPS-RTK技术的精度在厘米级,且在牺牲时间成本(限制船速)的情况下该技术与全站仪测量精度基本一致,但随着船速提升,采用特殊定位技术的GPS定位系统仍可保证测量效率和精度;对比平面定位精度误差可以发现,多波束测深系统能够得出符合规范要求的结果及合理判断;对比工作效率可以发现,多波束测深系统具备2.45 h/km2的单位面积测量效率,双频测深系统(HY1602)则为5.92 h/km2,多波束测深系统的应用价值可见一斑,其能够较好为GPS-RTK技术在水下地形测量中的应用提供支持。表1为全站仪定位结果与GPS-RTK定位结果,结合表1可以发现,GPS-RTK技术可取得达到厘米级的精度坐标,且误差积累不存在于各点位之间,与全站仪定位结果的符合度较高,考虑到这一结果得出在限制船速牺牲时间成本前提下,船速在6节以上时,GPS-RTK技术仍可满足测量精度要求,但全站仪将无法准确跟踪观测,GPS-RTK技术的实用性可见一斑。
3 基于GPS-RTK技术的水深测量
3.1 技术原理
该技术在水深测量过程中,主要是依靠GPS经载波相位差分技术获得的X,Y,H三维坐标进行分析,其中的数据精度达到厘米级,并配合相关探测仪器,获得水深数据,了解水底高程变化。其中的关系式包括:
T=H-OHC-S
CS=B-T+D
CS=B-H+OHC+S+D
其中,CS为探测的水深;S为RTK天线与水面之间的距离;T为潮位;H为RTK测量的大地高;OHC为深度基准面到参考椭球面之间的距离;B为换能器与水底之间的距离;D为吃水深度(上述所有数据的单位均为米)。
3.2 数据处理
3.2.1 数据剔除
从3.1段落中给出的关系式中可知,在GPS-RTK技术中,RTK的高程与水深值精度之间存在相关性,所以提高数据处理的精度,则需要获得RTK厘米级数据,其中的关键就是固定解模式下的高程。但是现有的经验显示,在测量期间若测量船靠近大型船舶或者受到短暂电磁波的干扰,会导致RTK处于非固定解模式下,最终导致误差出现,因此数据处理中需剔除非固定解模式下的数据。
3.2.2 基于HYPACK的数据处理
HYPACK作为一款先进的水道测量与海洋调查软件,具有灵活的功能设置,满足水深测量数据处理要求。
在原始数据处理中,经过HYPACK任务文件解析,原始文件(.RAW)中可提取到水深测量过程中的参数与信息。此时当RTK处于固定解模式下,原始数据会对应相应的潮位信息,而在非固定解模式下(系统显示RTK状态码不为4),则系统不会收录潮位信息。因此在数据处理中,可通过HYPACK中固定解模式下的潮位信息与完整时间,判断不同时间下的潮位数据,图2为数据处理示意图。
3.2.3 潮位的获取
将原始数据上传到Excel表格之后,根据数据的排序生成连续的潮位表,从表中获得对应的潮位信息与时间,运用表格的公式批量编辑功能,获得潮位与时间的对应数据。
本次研究中,依靠HYPACK提供的测量方法,在潮位设置中选择GPS设备,通过调整GPS预滤波选项,使潮位与定位都选择狀态码“4”,经过上述处理后,可获得剔除了非固定解模式的数据,生成水深数据。
3.3 数据的综合改正输出
在获得水深数据后,可通过综合改正输出的方法提取最终数据,此时选择HYPACK“后处理”选项中的“综合改正输出”,选择水深文件后,勾选相应的参数,并进行改正,由此能够获得最终数据。
最后为确保测量结果的准确性,在水深测量中可以配合测深锤选择任一点进行测量,用于检测水深数据是否存在异常。
4 结 论
综上所述,GPS-RTK技术能够较好地服务于港口码头测量。在此基础上,本文涉及的测量方式选择、工程实践分析等内容,则提供了可行性较高的GPS-RTK技术应用路径。为更好地服务于港口码头测量,GPS-RTK技术的应用还需要关注基准站的科学创建、转换参数的合理设定、岸坡观测的针对性开展等技术点,进一步优化GPS-RTK技术在港口码头测量中的应用。
参考文献:
[1] 田慧,宋中华.PPK和GPS-RTK在黄河三角洲海区测验中的数据对比分析 [J].东北水利水电,2020,38(11):26-27+ 29.
[2] 姜福红.水工环地质勘查中GPSRTK技术的应用 [J].中国金属通报,2020(8):201-202.
[3] 沈相儒.GPS-RTK技术在港口码头测量中的应用 [J].工程建设与设计,2020(9):86-87+90.
[4] 梁书祥.GPS-PPK技术在港口航道测量领域的应用研究 [J].企业科技与发展,2020(1):123-125.
作者简介:孟晓辉(1986.08—),男,汉族,山东济南人,助理工程师,本科,研究方向:海道测量。
