微型计算机在车辆自动转向控制中的应用可靠性研究
2020-07-09贾建忠
贾建忠
(乌鲁木齐职业大学,乌鲁木齐 830001)
引言
微型计算机是由大规模集成电路组成的、体积较小的电子计算机,它以微处理器为基础,配以相关的硬件、接口及辅助电路,可以控制车辆自动转向[1]。车辆自动转向控制存在于车辆的自动转向系统中,它可以通过电线传递信号控制执行机构动作,来取代传统转向系统中的机械转动和机械连接[2]。随着汽车制造技术不断的革新,车辆自动转向控制逐渐与微型计算机联合起来,车辆在实际驾驶过程中,会根据微型计算机传输的道路信息,转换为转向控制指令,防止车辆在行驶过程中,受到路面冲击和意外。研究微型计算机在车辆自动转向控制中的应用可靠性分析,可以帮助分析解决微型计算机在车辆自动转向控制中发生的问题,增强车辆的安全性能,提高车辆自动转向系统的准确性和适用性[3]。
1 微型计算机在车辆自动转向控制中的应用可靠性研究
1.1 微计算机应用时的阻尼控制参数
在计算微计算机应用后车辆转向的阻尼控制参数时,将车辆视为高速匀速行驶[4]。设此时的车辆在行驶过程中的一个角度θVZ为转向时的临界角,车辆的转向角大于该临界角时,车辆会发生回正超调,固定车辆的转向角度,此时的临界角随车速变化的关系曲线,如图1所示。
由图1所示的变化曲线,在确定阻尼控制参数时,得到车辆的EPS工作模式的判断算法,如表1所示。

图1 临界角随车速变化的关系曲线

表1 工作模式判断算法
由表1所示,θS为车辆的转向角。结合上图1可知,当车辆车速超过设定值,但扭矩信号落在数值区间[-1,1]时,车辆出现阻尼控制[5]。控制自动转向时,EPS工作模式则会出现较大的转动惯量和粘性阻力,此时的微型计算机会对车辆行驶系统进行惯性补偿和阻尼补偿,也就是在静态助力曲线的基础上,增加一个附加的电流,计算公式为:

式中:
Ia—惯性补偿或阻尼补偿的电流;
Ka—惯性补偿或阻尼补偿系数。
但车辆在自动转向时会存在一定的摩擦,在克服这部分阻力矩时,微型计算机还会进行部分的摩擦补偿,控制补偿部分的自动转向摩擦补偿电流,计算公式为:

式中:
Ib—电机摩擦补偿系数;
sgn(θs)—方向盘的转动方向。
所以微型计算机在实际应用时,会控制车辆的助力电机的特性曲线来获得电流及三个补偿电流,所以在计算最终的阻尼控制参数时,按照转向阻力矩与最大助力矩进行计算,转向阻力矩Tf的计算公式为:

式中:
f—车辆轮胎和路面之间的滑动摩擦系数,取经验值0.7;
G—车辆前轴负荷;
P—轮胎气压。
所以计算得到车辆转向盘上的转矩为:

式中:
Tz—转动盘上提供的总转矩;
L—转向摇臂长;
L'—转向节臂长;
j—转向器角传动比;
η—转向器的总效率。
联合上式(2)、(3)上的各项参数,即为最终计算出的阻尼控制参数,利用计算出的阻尼控制参数,读取微型计算机在车辆自动转向控制时的转速信号,计算读取信号过程的可靠度,完成对微型计算机在车辆自动转向控制中的应用可靠性研究[6]。
1.2 读取微型计算机控制时的转速信号
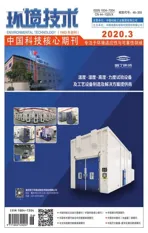
在读取微型计算机控制时的转速信号时,在上述阻尼参数的控制下,微型计算机的扭矩输入信号和电压输出间呈现出线性关系,如图2所示。
由图2所示,横坐标为车辆方向盘上的扭矩,纵坐标为微型计算机输出的ECU电压值[7]。将微型计算机输出信号分为主扭矩和副扭矩,当微型计算机的输出电压值为2.5 V时,车辆方向盘上的扭矩为0,此值为判断微型计算机的扭矩输入输出特性,自动转向时呈现出的特性变化,如图3所示。
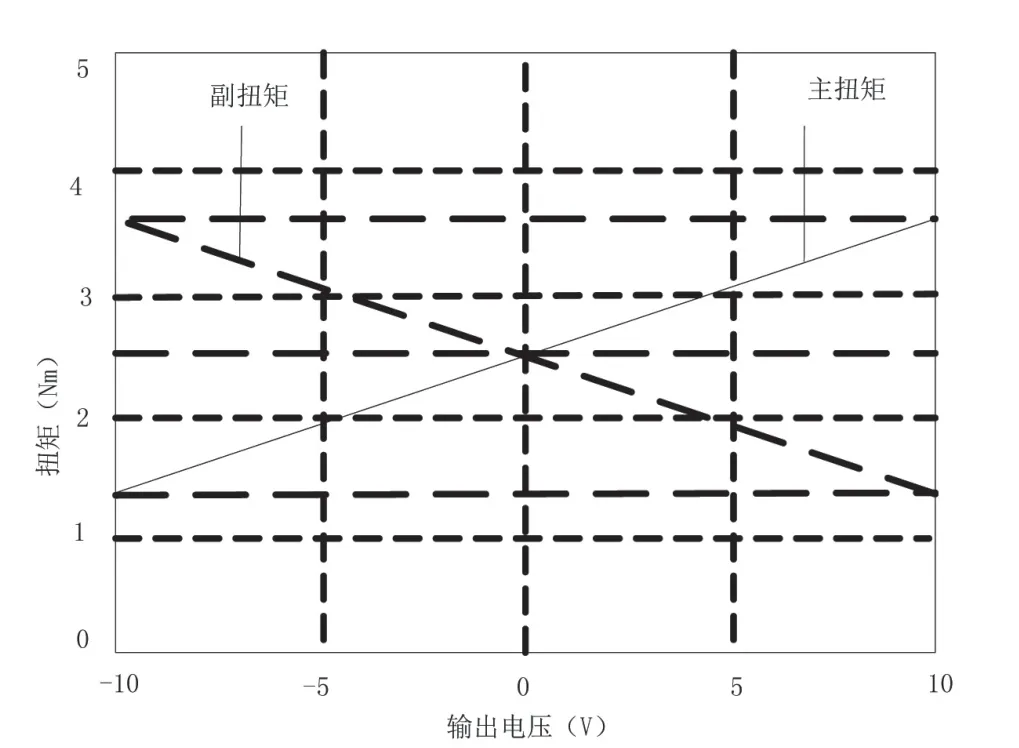
图2 微型计算机的扭矩输入信号和电压输出关

图3 微型计算机扭矩信号输入输出特性
由图3所示的输入输出特性,在读取微型计算机控制时车辆转速信号时,尽量减少外部对扭矩和转角信号的干扰[8]。采用二阶有源低通滤波器预处理上图中显示的输入输出特性,计算滤波器在频带内的增益,计算公式为:
式中:

Rf—滤波器中的电阻;
R—频带内的电阻。
所以计算得到转速信号的传递函数为:

式中:
CR—RC滤波器的RC值。
利用上式(5)(6)计算得到转速信号的频率,计算公式为:

式中:
f0—滤波器的频率。
所以在读取转矩信号时,微型计算机采用超前滞后校正网络,将超前校正网络看作一个PD环节,预处理自动转向控制信号,提高微型计算机自动控制时抗干扰性能[9]。考虑车辆自动转向控制助力特性的实际,控制传感器的输出电压在2.25~2.75 V之间,设定微型计算机的应用方式为非接触形式,保持多路信号的输出,在实际读取时,微型计算机通过分动器的输出轴,向车辆自动转向控制ECU输入6个脉冲电压信号[10,11]。此时的转速信号就直接可以在汽车仪表盘上直接读取得到。计算微型计算机得到转速信号过程中的可靠度,完成微型计算机在车辆自动转向控制中的应用可靠性分析。
1.3 计算应用可靠度
在计算微型计算机在车辆自动转向控制的应用中的可靠度时,利用FTA分析方法来分析微型计算机读取控制信号的过程,得到应用可靠度[12]。假设T为微型计算机应用时的故障树的顶事件,表示故障树的n个相互独立的底事件的集合,所以此时的结构函数就可表示为:

对上式(8)予以假设条件,假设条件为:

式中:
n—故障树所有底下所有底事件的个数;i
Y—此事件发生的状态;
0—第i个底事件不发生;
1—i个底事件发生。
计算这些底事件基本的概率可靠度,计算公式为:

式中:
Igi—概率重要度;
Fi(t)—微型计算机元部件不可靠度;
g—自动转向控制顶事件发生的概率。
利用上式可计算得到微型计算机在车辆自动转向控制中应用时的概率可靠程度,从车辆自动转向控制系统的安全角度出发,计算微型计算机临界可靠度,计算公式为:

式中:
IG—临界可靠度。
利用此公式,计算得到微型计算机在车辆自动转向控制中应用的临界可靠度,得到可靠度的取值范围:当上式(11)呈现出连续可导的变化情况时,可靠度贴近于1,表示研究出的可靠性结果准确[14,15]。基于以上,完成对微型计算机在车辆自动转向控制中的可靠性研究。
2 仿真实验
2.1 搭建实验台架
实验台架设定EPS控制器为核心,配合原车转向装置、传感器、电磁离合器、助力电机、减速增扭装置以及加载装置,实验台架共设计为三部分控制器部分、台架部分以及信号采集及显示部分。EPS控制器及基本的I/O接口控制器的接口,采用横向拉杆处设置弹簧加载的方法,整体的台架设计,如图4所示。
由图4所示搭建的实验台架,准备一辆含有微型计算机、拥有自动转向控制的车辆,车辆的参数,如表2所示。
基于上述搭建的台架,设置表2中的参数到车辆自动转向控制参数中,分别使用两种传统可靠性研究方法与微型计算机在车辆自动转向控制中的应用可靠性研究方法进行实验,对比三种可靠性研究方法处理表2数据后,数据产生噪声的情况。
2.2 实验结果分析
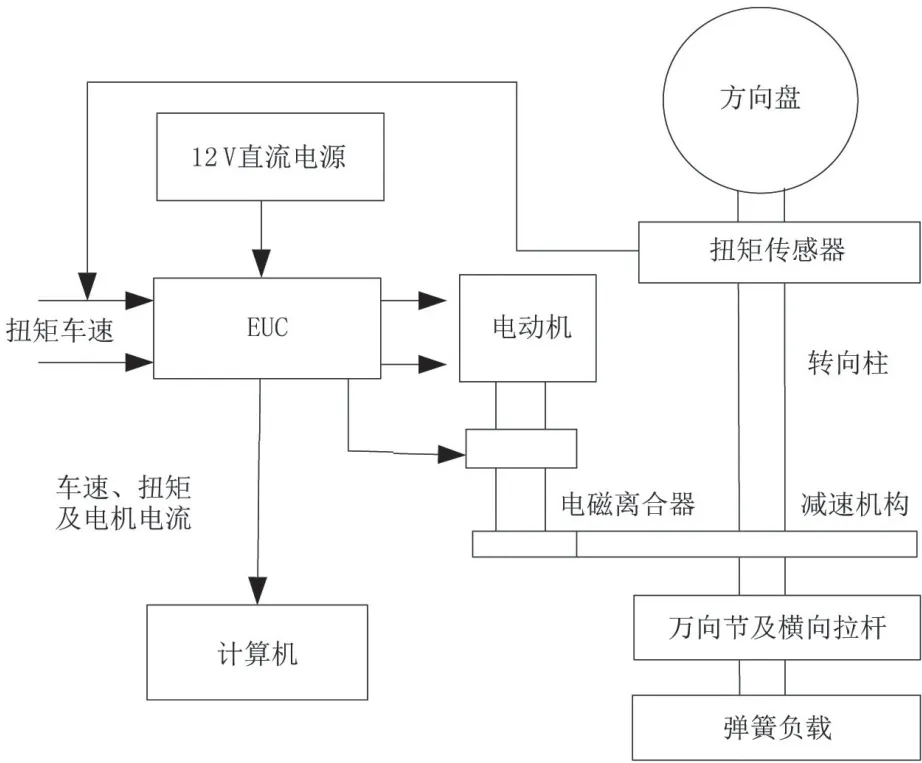
图4 搭建的实验台架
三种可靠性分析方法最终得到的实验结果,如图5所示。
由上三实验图所示,传统可靠性研究方法1在处理数据时数据噪声数据幅值变化为[-3,2],传统可靠性研究方法2在处理的噪声数据幅值变化为[-2,2],微型计算机在车辆自动转向控制中的应用可靠性研究方法幅值变化为[-1,1]。综上所述,与两种传统可靠性分析相比,微型计算机在车辆自动转向控制中的应用可靠性研究方法在处理数据时噪声数据的幅值变化更小,对可靠性分析的干扰更少,适合实际研究使用。
表2 车辆参数
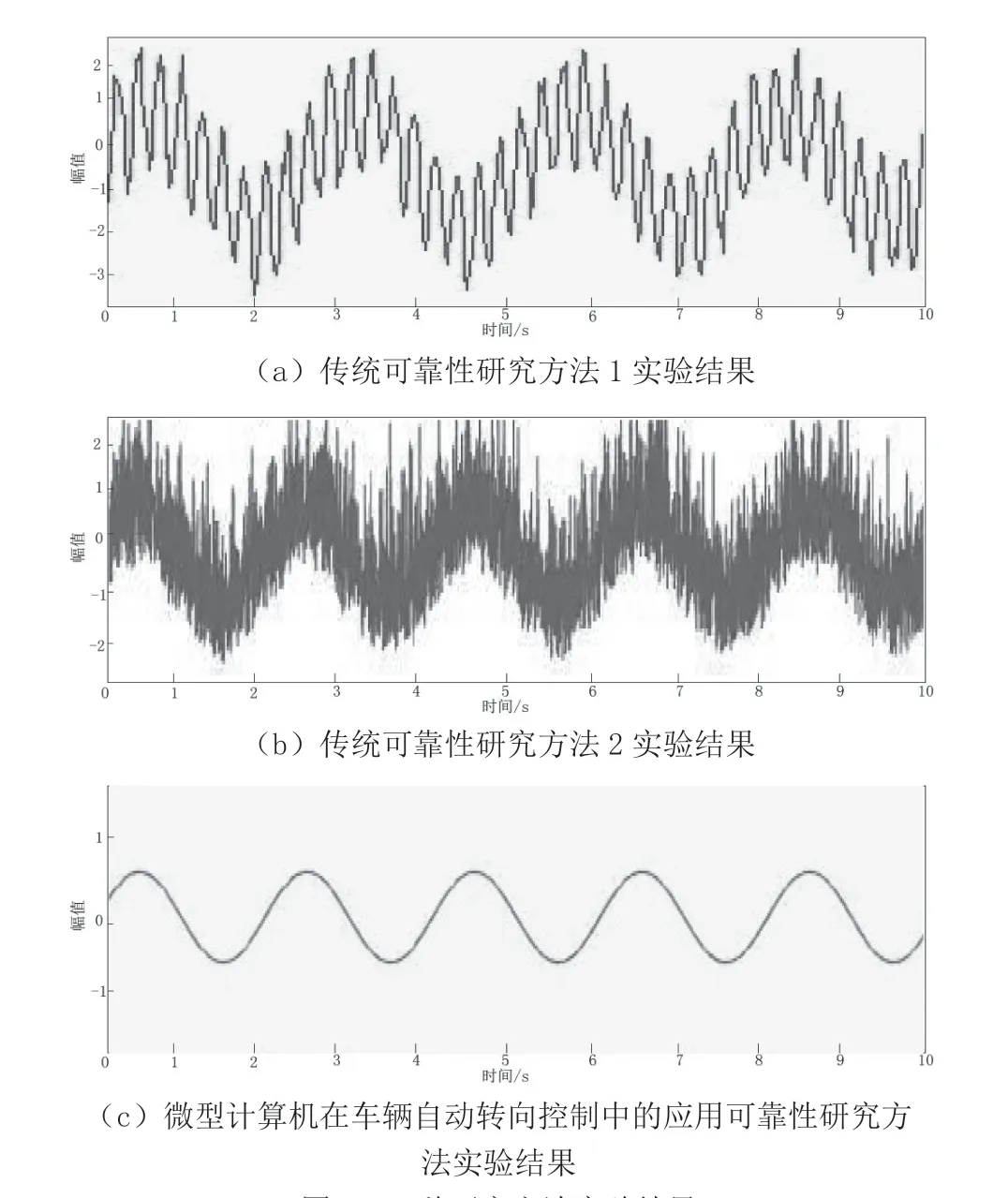
图5 三种研究方法实验结果
3 结束语
随着自动化控制的不断发展,在车辆自动转向控制中应用微型计算机,已经成为了大势所趋。研究微型计算机在车辆自动转向控制中的应用可靠性,帮助解决了传统应用可靠性研究方法适用性不强的问题,为研究可靠性提供了新思路。