攀爬机器人结构设计及分析
2020-07-08陆伟陈伟李子轩
陆伟 陈伟 李子轩
摘 要:随着时代的发展,城市中的高层建筑越来越多,在进行建筑外层施工或发生火灾等其他危害时,工作人员需要通过其他方式悬吊在建筑物外围,提升了工作人员的工作风险,因此代替人类工作的机器人便应运而生。近年来,科技与电子技术不断发展、成熟,将机器人应用到高层建筑的侦查和清洗等任务已成为可能。现今的建筑外围施工中普遍存在着施工人员多、劳动强度大、安全性较低并且容易受到天气因素影响等问题。将机器人应用到这类工作中,可降低施工人员高空作业风险,减少施工人员数量,提高工作效率。建筑用机器人的运动主要为攀爬,由于机器人体积较大、重量较重,因此对于机器人运动时动力学分析、吸附方式及材料的选择变得格外重要。建筑用攀爬机器人应能够实现在玻璃、混凝土等表面的前后、左右移动,并具有一定的越障能力,同时机器人应具有一定的可靠性,便于运输等特点。机器人通过工作人员远程遥控进行控制,可利用安装在机器人上的摄像头对周围环境进行观察。
关键词:攀爬机器人;结构设计
1 总体结构设计
按照大赛要求,攀爬机器人要求至少能在以下的任一种表面上可靠附着并行走、攀爬: 1.建筑结构的竖直立面(例如各种墙面); 2.建筑结构的水平下表面(类似天花板); 3.其它类型的表面(如钢管、钢丝绳等) 也可选择在以上1、2表面交替附着并行走、攀爬。 常用的建筑结构表面材料有:金属材料、水泥石灰墙面、石材、玻璃等。根据以上要求,确定了攀爬机器人的设计方案。
由于攀爬机器人工作表面为玻璃或混凝土、瓷砖等表面,因此吸附方式采用静电吸附;移动方式采用履带式移动机构可以满足机器人在建筑表面的自由移动,同时还具有一定的越障能力。机器人可通过底盘移动机构上方的工作手臂实现对需安装玻璃的携带,及协助安装,手臂上同样装有真空吸盘,用来吸附需安装的玻璃。该机器人通过两台电机驱动,一台负责前进,另一台负责转向。前进时用减速齿轮逐级传递实现机器人前后运动,转向则通过机器人底盘内的差速器实现中枢转向。
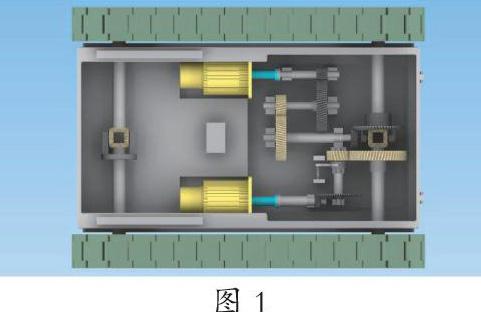
图1為攀爬机器人底盘内部俯视图。图中上方的黄色电机用来负责机器人的前后移动,下方的黄色电机负责机器人转向,转向时由于差速器使左右两履带出现速度差,从而实现中枢转向。在前进时,为避免两电机互相干涉,在转向齿轮上装有同步器。在需要转向时,负责前后移动的电机停止工作,随后转向电机工作,同步器与圆柱齿轮同步,带动履带运动从而实现转向。
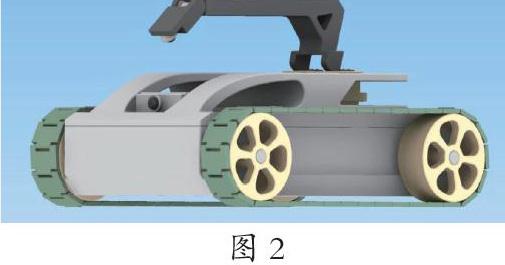
通过在机器人底盘移动机构上安装工作手臂来完成相应任务,机械手臂可拆卸、更换以完成不同任务。如图2中所示安装了带有侦查摄像装置的手臂,在发生高层建筑劫持人质或火灾可用于在建筑外侧对内进行侦查的任务,亦可用于携带救援设备。机器人自身也装有摄像监控装置,在建筑表面移动时,可用于观察周围情况。机器人自身通过外接电源设备来实现对电机,高压供电模块和机械手臂的供电,其目的在于减轻机器人自身质量,从而可携带更多设备。
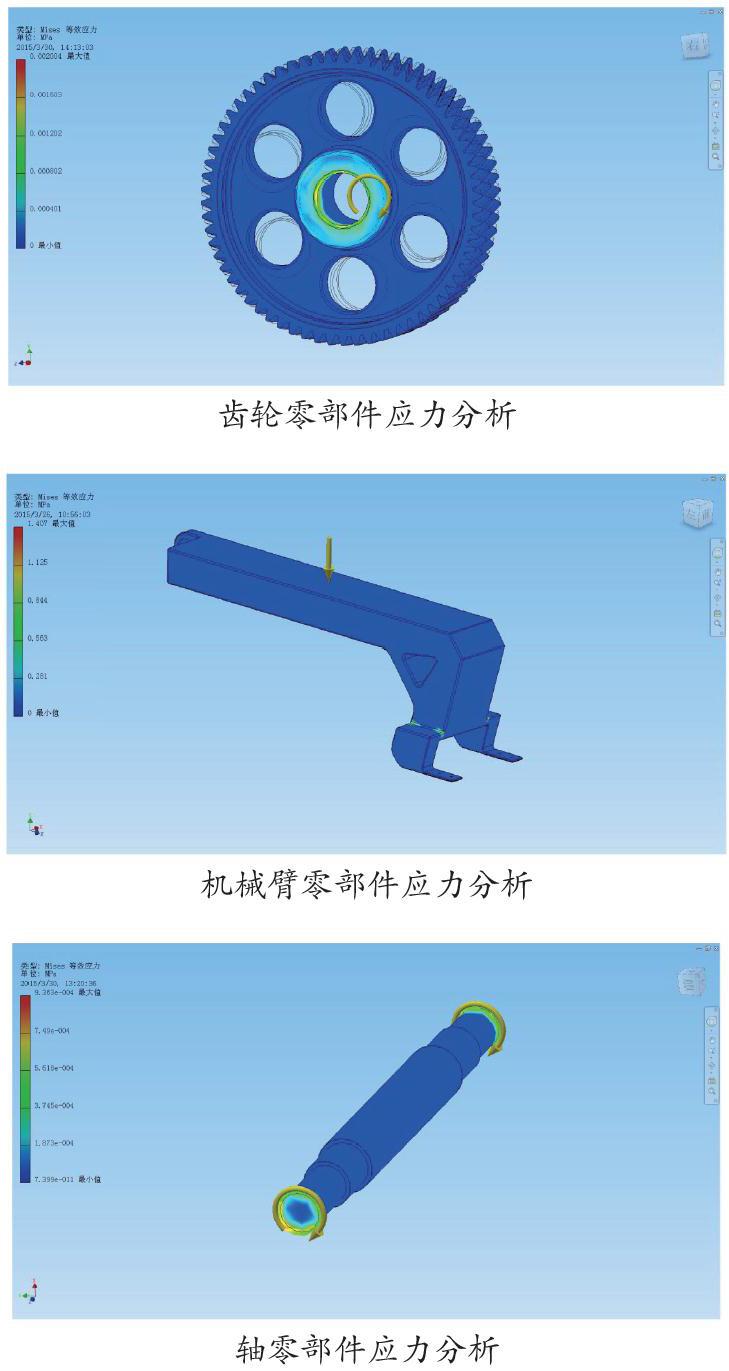
2攀爬机器人应力分析
有限元分析利用数学近似的方法对真实物理系统进行模拟。还利用简单而又相互作用的元素,即单元,就可以用有限数量的未知量去逼近无限未知量的真实系统。
有限元分析是用较简单的问题代替复杂问题后再求解。它将求解域看成是由许多称为有限元的小的互连子域组成,对每一单元假定一个合适的近似解,然后推导求解这个域总的满足条件,从而得到问题的解。这个解不是准确解,而是近似解,因为实际问题被较简单的问题所代替。由于大多数实际问题难以得到准确解,而有限元不仅计算精度高,而且能适应各种复杂形状,因而成为行之有效的工程分析手段。
有限元是那些集合在一起能够表示实际连续域的离散单元。有限元的概念早在几个世纪前就已产生并得到了应用,例如用多边形(有限个直线单元)逼近圆来求得圆的周长,但作为一种方法而被提出,则是最近的事。有限元法最初被称为矩阵近似方法,应用于航空器的结构强度计算,并由于其方便性、实用性和有效性而引起从事力学研究的科学家的浓厚兴趣。经过短短数十年的努力,随着计算机技术的快速发展和普及,有限元方法迅速从结构工程强度分析计算扩展到几乎所有的科学技术领域,成为一种丰富多彩、应用广泛并且实用高效的数值分析方法。
参考文献:
[1]王巍.曲面幕墙清洁机器人攀爬技术[J]北京航空航天大学学报.2008.34(1):17-18
[2]Szcerba Roboert,J.Chen,Danny.Z.Planning shortest paths a mong 2D and 3D weighted regions using framed-subspaces[J]The International Journal of Robotics Research 1998.17(5):531-546
[3]吴善强,李满天,孙立宁.爬壁机器人负压吸附方式概述.
[4]杨建元.吸附型壁面攀爬机器人研究[D]西安:西北工业大学 2007:16-18
[5]张越.国内外壁面移动式机器人发展概况[J].唐山工程技术学院学报,1994,16(1):27-30
(1.嘉兴市特种设备检验检测院,浙江 嘉兴 314000;2.同济大学浙江学院浙江,浙江 嘉兴 314000)
