基于双压电陶瓷驱动原理的精密定位平台研究
2020-07-07胡志平唐飞扬孙浩楠朱军辉汝长海
胡志平,谷 森,唐飞扬,孙浩楠,朱军辉,王 勇,汝长海,2,
1.苏州大学 机器人与微系统中心,江苏 苏州 215021;2.苏州纳米科技协同创新中心,江苏 苏州 215021;3.上海大学 机电工程与自动化学院,上海 200072)
0 引言
随着科学技术的发展,纳米材料逐渐兴起。为了研究纳米材料的机械和电学性能,纳米操作系统的开发逐渐受到科研人员的重视,且成果显著。文献[1-4]介绍了如纳米操作机、纳米材料测试仪及原子力显微镜(AFM)等纳米操作系统[5]。此类纳米操作系统常需借助扫描电子显微镜(SEM)的视觉伺服反馈功能对纳米材料进行操作与表征[6]。基于SEM的纳米操作环境要求纳米操作系统的各组成单元具有无磁、体积小及真空兼容的特点。
尽管粘滑驱动定位平台符合无磁、真空兼容、亚纳米级分辨率、毫米级行程的要求,且与压电扫描器常作为理想的纳米定位装置广泛应用于纳米操作系统,其仍存在局限性。如粘滑驱动定位平台的无振动扫描范围仅限于1.5 μm左右,压电扫描器提供了更大的扫描范围,但不能改变扫描区域的位置。为满足高分辨率的定位要求,现有粘滑驱动定位平台均采用标称位移较小的单块压电陶瓷作为驱动模块,常用压电陶瓷标称位移为2 μm。压电陶瓷以步进模式驱动粘滑定位平台时,平台的振动幅度为几十纳米,通过平台末端低硬度钨探针的放大,振幅可达数微米[7],接近甚至超过平台的无振动扫描范围,从而直接影响纳米操作系统的精度。当粘滑驱动定位平台与压电扫描器机械式组合后被应用于AFM时,系统结构较大,难以安装于SEM中。
为解决上述问题,本文设计了基于双压电陶瓷驱动原理的精密定位平台。平台驱动器由两块压电陶瓷组成,小压电陶瓷先以步进模式驱动定位平台快速移动,大压电陶瓷再以扫描模式驱动定位平台来实现精准定位,该定位平台综合了粘滑驱动定位平台与压电扫描器的优点。
1 定位平台的设计
1.1 驱动原理及驱动器的选择
本文基于双压电陶瓷驱动原理设计的定位平台包括基座、压电陶瓷、柔性铰链机构和导轨4个基本单元,驱动原理如图1所示。大、小压电陶瓷串联连接并与柔性铰链一端固定,陶瓷输出位移通过柔性铰链机构传递到末端执行器导轨。
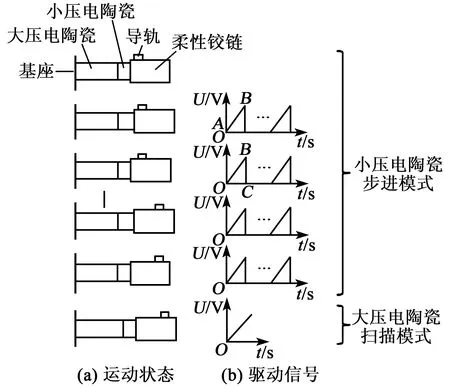
图1 双压电陶瓷驱动原理图
对大、小压电陶瓷分别施加图1(b)所示电压信号时,定位平台将产生如下运动:
1)AB段,对小压电陶瓷施加缓慢上升的电压,小压电陶瓷缓慢伸长且输出的位移通过柔性铰链机构传递到导轨,导轨在受到的静摩擦力作用下与柔性铰链机构保持相对静止。
2)BC段,小压电陶瓷在受到阶跃下降的电压信号后快速缩回,柔性铰链机构也随之快速缩回。由于导轨与柔性铰链机构之间的惯性力远大于摩擦力,导轨在滑动摩擦力的作用下相对于基座保持静止。
3) 整个ABC阶段,导轨在水平运动方向移动了一段位移,对小压电陶瓷连续施加ABC阶段的电压信号,导轨在同一水平方向不断快速移动,即实现了定位平台的高速、跨尺度运动。
4) 小压电陶瓷驱动器以步进模式驱动定位平台运动一段位移后,切换到大压电陶瓷的扫描模式,对大压电陶瓷施加恒定电压后,其缓慢伸长一段位移。
本文选用Thorlabs公司两款标称位移不同的压电陶瓷作为定位平台的驱动模块,其中零位移推力为160 N,谐振频率为115 kHz,具体参数如表1所示。设计中选用双列交叉滚子导轨,长为30 mm,行程为21 mm,其具有响应快、精度高及稳定性好等优点[8]。

表1 压电陶瓷性能参数表
1.2 结构设计
图2为基于双压电陶瓷驱动原理的精密定位平台结构图,平台整体尺寸为30 mm×17 mm×8 mm。压电陶瓷驱动器包括标称位移不同的两块压电陶瓷,大、小压电陶瓷串联并与柔性铰链机构一端固定安装于基座槽内。调节预紧螺丝,给压电陶瓷施加合适的预紧力,调节基座底部摩擦力调节螺丝可调整柔性铰链在垂直方向的位置,进而改变导轨与柔性铰链间的正压力。柔性铰链上表面凸台处粘有氧化锆陶瓷摩擦片,摩擦片与中间导轨部分接触,对压电陶瓷输入电压信号时,其会驱动柔性铰链结构,从而带动导轨移动。

图2 定位平台结构图
压电陶瓷推荐的最佳预紧力为50 N,并已通过试验验证其准确性。结合大、小压电陶瓷位移,阻滞力与柔性铰链柔度的关系曲线(见图3)可知,大、小压电陶瓷驱动的柔性铰链机构最佳柔度分别为0.11 μm/N和0.02 μm/N。由于大、小压电陶瓷驱动同一个柔性铰链机构,所以,最终选取柔性铰链的柔度为0.11 μm/N,即刚度为9.09 N/μm,为柔性铰链机构的设计提供了理论依据。

图3 柔性铰链柔度、压电陶瓷位移和阻滞力关系曲线图
2 柔性铰链有限元分析
在精密定位装置中柔性铰链是一种常用的结构形式,其主要利用弹性材料微小变形和自回复特性获得高位移分辨率,避免了传动过程中的空行程和机械摩擦[9]。由图1可知,定位台的步进模式运动需要压电陶瓷驱动器的周期性振动来实现。为了获得定位台结构的振动特性,防止共振或自激等情况发生,设计时需要对定位台铰链结构进行模态分析。本文采用Ansys Workbench的模态分析模块对柔性铰链机构进行模态分析,获得前6阶振动频率和对应的模态振型,如图4所示。仿真结果表明,定位平台压电陶瓷驱动器的工作频率应远小于31 667 Hz。
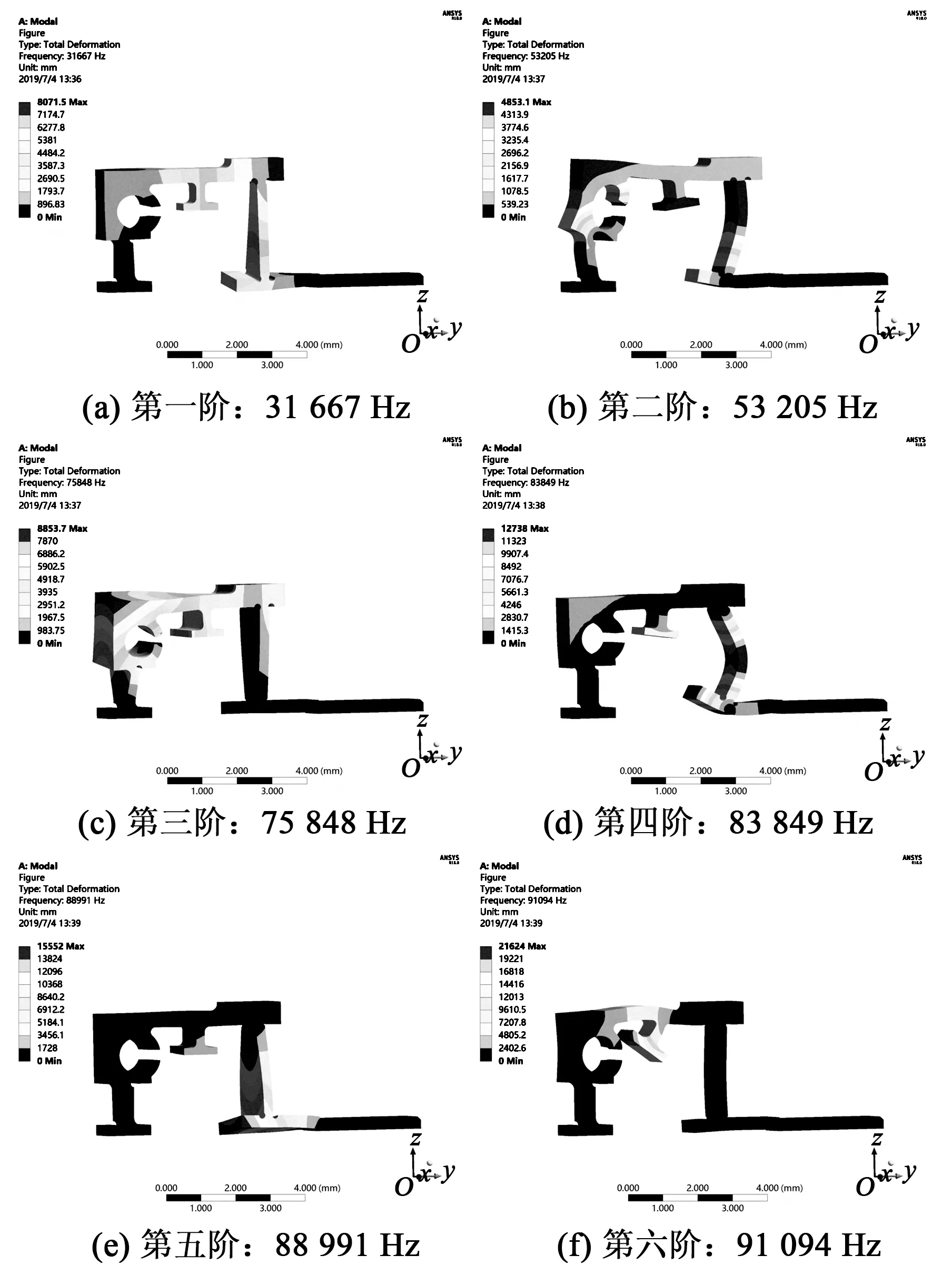
图4 柔性铰链结构模态分析图
3 定位平台测试
基于双压电陶瓷驱动原理设计的定位平台有小压电陶瓷的步进模式和大压电陶瓷的扫描模式两种驱动模式。因此,定位平台的性能可以分别在这两种不同的驱动模式下测得,实验测试平台如图5所示。其中激光干涉仪选用KEYENCE(基恩士)LK-GD500系列,最小分辨率为10 nm。
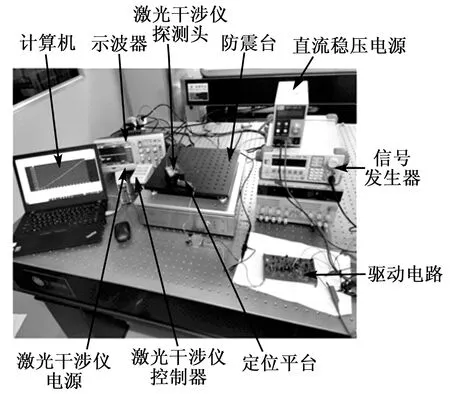
图5 实验平台
3.1 大压电陶瓷扫描模式测试
测定大压电陶瓷以扫描模式驱动时定位平台的性能,实验采用HSPY直流稳压电源,输入电压最高可达200 V,最小电压分辨率为0.1 V。采用KEYENCE的非接触式激光干涉仪测量定位平台在不同驱动电压时的输出位移。
为减小人为测试误差及环境干扰,重复试验8次,并取其平均值作为该电压下的标称位移,实验结果如图6所示。由图可知,定位平台在大压电陶瓷扫描模式驱动下的最大扫描范围平均值为4.9 μm。

图6 定位平台的驱动电压与输出位移曲线
采用激光干涉仪测量定位平台的输出位移分辨率。对压电陶瓷施加递增电压,定位平台产生相应的输出位移。当电压足够小时,可分辨的输出位移即为定位平台的输出位移分辨率。理论上定位台的位移分辨率与压电陶瓷的位移分辨率一致,但由于装配、环境等因素,定位台的位移分辨率比压电陶瓷的位移分辨率低。施加大压电陶瓷电压,并以0.1 V的梯度递增,定位台的可分辨输出位移为16 nm,所以,定位平台具有16 nm的运动分辨率,如图7所示。
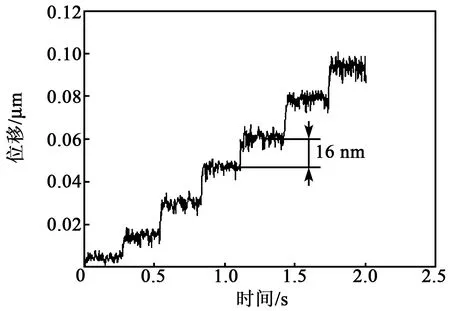
图7 定位平台扫描模式分辨率
3.2 小压电陶瓷步进模式测试
测试定位平台在小压电陶瓷步进模式驱动时的性能。实验采用HSPY直流稳压电源作为驱动电路的电源部分,利用信号发生器产生锯齿波电压驱动定位平台,利用示波器监测锯齿波电压信号的变化,采用KEYENCE非接触式激光干涉仪采集定位平台的输出位移数据,最后通过KEYENCE自带软件LK-Navigator显示并后续分析。
测量定位平台被小压电陶瓷驱动时的最大单步位移,对小压电陶瓷施加1 Hz、90 V的锯齿波电压,测试结果如图8所示,此时,定位平台输出的单步位移为0.9 μm。

图8 定位平台步进模式时的单步总位移
为测定小压电陶瓷驱动时定位平台的最小步长,对小压电陶瓷施加1 Hz锯齿波电压信号,依次减小输入电压信号的幅值,直至定位平台可分辨的输出位移最小。当输入电压为10 V时,其正、反向10步的位移分别为700 nm和710 nm,如图9所示。经计算,正、反向最小步长分别为70 nm和71 nm,正、反向位移较对称,且线性度较好。
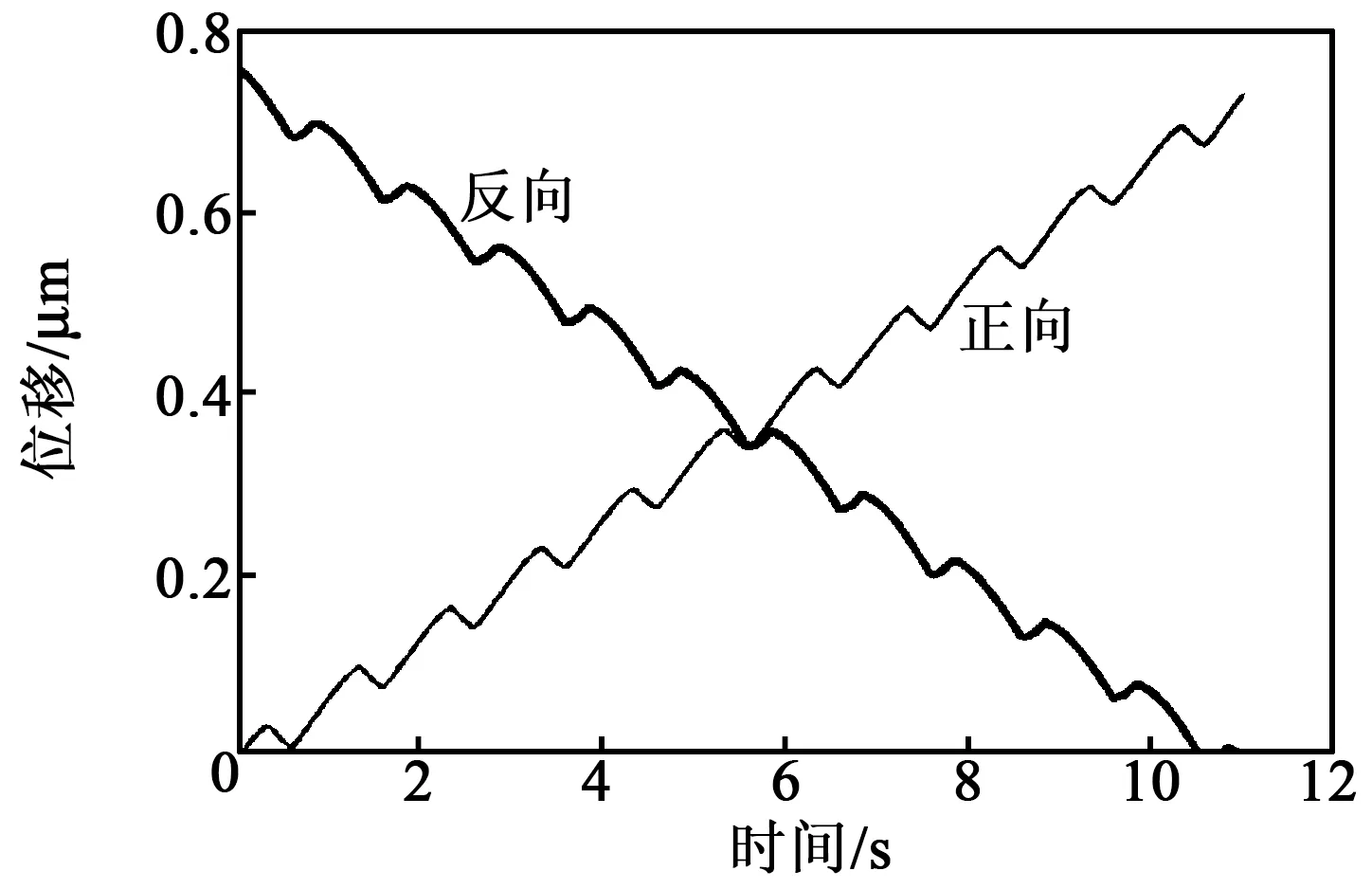
图9 定位平台最小步长
4 结束语
本文设计了基于双压电陶瓷驱动原理的精密定位平台,其驱动模块由两块压电陶瓷组成,分别实现定位平台的步进模式和扫描模式运动。实验表明,扫描模式下,当以90 V的恒定电压驱动大压电陶瓷时,定位平台的输出位移为4.9 μm,定位平台在扫描模式的位移分辨率为16 nm。步进模式下,分别以1 Hz、90 V和1 Hz、10 V的锯齿波电压信号驱动小压电陶瓷,定位平台的单步最大输出位移为0.9 μm,正、反向的最小步长分别为70 nm和71 nm,对称性和线性度较好。以15 kHz、90 V的锯齿波电压信号驱动小压电陶瓷,定位平台在水平运动方向的最大步进运动速度可达10 mm/s。大、小压电陶瓷的输出位移相差较大,说明小压电陶瓷以步进模式驱动时,定位平台的振动不会影响大压电陶瓷以扫描模式驱动时定位平台的精准定位。解决了粘滑驱动定位平台存在的大扫描范围及大行程的兼容性问题。
