基于MEEMD与FLP的光纤陀螺去噪
2020-07-05戴邵武陈强强刘志豪戴洪德
戴邵武,陈强强,2*,刘志豪,戴洪德
基于MEEMD与FLP的光纤陀螺去噪
戴邵武1,陈强强1,2*,刘志豪3,戴洪德1
1海军航空大学,山东 烟台 264000;2海军92728部队,上海 200040;3海军92214部队,浙江 宁波 315000
为了降低噪声对光纤陀螺输出的影响,提出了一种基于改进经验模态分解(MEEMD)和前向线性预测(FLP)结合的光纤陀螺去噪算法。首先,引入排列熵概念,利用改进经验模态分解对光纤陀螺信号进行分解与重构;然后针对分解后混合噪声的低阶IMF项,通过FLP算法进行滤波去噪;最后将经过MEEMD-FLP处理后的信号进行重构以得到结果。对某干涉型FOG进行静态测试,通过实测数据计算结果表明:与原始FOG信号相比,降噪后的RMSE降低了76.77%,标准差降低了76.76%。该算法可有效降低噪声对FOG输出信号的影响,具有更高的去噪精度。
光纤陀螺;信号去噪;经验模态分解;FLP算法
1 引 言
光纤陀螺(Fiber optic gyroscope,FOG)是进行角速度测量的新型传感器件,自20世纪70年代发展以来,广泛应用于导航制导领域,其输出精度与惯导系统性能直接相关[1]。在光纤陀螺实际使用过程中,受工作环境、制造工艺等多方面因素影响,陀螺信号输出中除了有用信号之外,还伴随着大量噪声,使陀螺输出信号淹没在较强的噪声信号里,限制了光纤陀螺的使用。因此,如何降低噪声对陀螺信号的影响,实现光纤陀螺输出的有效降噪,成为光纤陀螺应用中亟需解决的问题[2]。
随着FOG的广泛应用,关于FOG去噪方面的研究也得到了广泛的关注。文献[3]通过FLP滤波技术对光纤陀螺信号进行实时滤波,减少了光纤陀螺的零偏不稳定性并抑制了高频噪声;文献[4]采用归一化LMS算法进行了光纤陀螺降噪分析,降低了光纤陀螺角度随机游走噪声;文献[5]通过时间序列分析方法,对光纤陀螺的漂移信号建立ARMA模型,并通过强跟踪Kalman滤波方法进行随机信号最优估计;小波分析作为经典的去噪方法,在FOG去噪中也取得了较好的效果[6]。随着对小波分析研究的深入,文献[7]提出了基于小波包变换的FOG去噪方法,在小波分析的基础上进行了改进,取得了更好的去噪效果;文献[8]利用提升小波去噪法对光纤陀螺分形噪声进行了滤除。但面对复杂的噪声信号时,这些单一的去噪方法提升空间有限,在一定程度上限制了去噪效果。因此,采用信号分解方法进行信号处理并降噪的方法得到了推广。
在信号分解过程中,文献[9]利用小波包变换对信号的多尺度分解,将原有的去噪过程转换为“小波分解-去噪”的过程;文献[10]通过小波和对角神经网络结合,实现对高频噪声和低频噪声的综合去噪。但小波基的选择对信号的去噪效果起着决定性作用,是一种非自适应的滤波方法。在此基础上,文献[11]提出了利用经验模态分解(empirical mode decomposition,EMD)代替小波分解进行FOG降噪,大大提升了自适应性;EMD方法在工程中有着广泛应用,针对非线性非平稳时间序列有着很好的效果。然而,在EMD分解过程中,存在着模态混叠现象,且EMD分解过程中产生的多个分量中无具体物理意义,如何对多个分量进行筛选,在一定程度上影响着FOG的去噪精度。
本文在FOG去噪过程中,通过经验模态分解(modified ensemble empirical mode decomposition,MEEMD)与前向线性预测(forward linear prediction,FLP)算法的结合,采用“分解-去噪”思想对FOG输出信息进行分析;在“分解”过程中,采用MEEMD方法对原FOG输出信号进行处理,避免了小波基选取的复杂,同时缓解了EMD分解中的模态混叠现象;在“去噪”过程中,引入排列熵概念对信号进行分析,通过衡量信号复杂度完成对异常信号的筛选,同时利用FLP算法完成去噪。通过MEEMD的多尺度分解以及FLP算法的高精度去噪优势相结合,有效减少了噪声信号对FOG输出的影响,从而提高了FOG的精度,并在一定程度上提升了惯导系统的性能。
2 MEEMD-FLP去噪算法
结合上文对FOG去噪算法的分析可知,实际采样的FOG数据受多方面因素影响,淹没在各种噪声中,此时单一的FOG去噪方法精度有限,且由于原始FOG输出中噪声信号较强,单一的去噪方法的性能受到限制,因此采用“分解-去噪”的思想对FOG输出数据进行噪声剔除[12]。在MEEMD-FLP去噪算法中,可以分为“分解”与“去噪”两个步骤。首先通过MEEMD分解,对原始FOG数据进行预处理,提取出信号的内部特征,以实现对FOG信号的初步筛选;然后通过精确度更高的FLP去噪算法进行降噪处理,最终完成FOG数据的降噪过程。
2.1 信号分解
在信号分解过程中,基于小波变换的分解具有良好的时频局部化能力和多分辨率分析特性,可以在多个尺度上进行小波分解,同时能够在时频域中对信号进行分析。小波分析的缺点在于小波基的选取过于复杂,有时为了达到理想效果,甚至需要构建合适的小波基,这在一定程度上限制了其自适应性[13]。为了替代小波分析在时间序列分解中的应用,选择经验模态分解对FOG输出数据进行分析。经验模态分解于1998年由Huang提出,是一种新型的信号分解方法,在非线性、非平稳信号的处理中具有良好的效果[14]。EMD算法将复杂信号分解为多个固有模态函数(intrinsic mode function,IMF,用imf表示)和一个余项(residual series),EMD分解的表达式如下:
式中:()为原始信号;imf-i()为第个IMF分量;r()为分解得到的余项。待分解信号可表示为分解得到的子序列之和。
在分解过程中,根据IMF判据,判断IMF分量的标准为
1) 信号中零点数和极值点数相等或至多相差1个;
2) 极大值包络线和极小值包络线的均值相等且为0。
相比小波分析而言,经验模态分解在信号处理中具有很好的自适应性,针对非线性、非平稳信号具有很好的分解效果,在信号处理中得到了广泛的应用。但在实际应用中,存在着以下两个问题:
1) 模态混叠问题。即同一个IMF分量中出现了不同尺度和频率的信号,或同一尺度及频率的信号被分解到多个IMF分量中。多个模态混杂在若干个IMF分量中,影响了IMF分量的物理意义,不利于后续的去噪处理。
2) 噪声信号的确定。在分解产生的多个IMF分量中,如何选择需要滤除的IMF分量以及后续如何对所得到的多个IMF分量进行处理。
针对FOG输出数据的EMD分解中存在的问题,本文采用MEEMD方法进行信号分解;MEEMD方法能够在一定程度上克制模态混叠现象,其步骤如下[15]:

3) 引入排列熵(permutation entropy,PE)概念,对式(3)中所得的IMF分量进行PE判断。PE是一种检测时间序列随机性和动力学突变的方法,其概念简单,运行速度快,抗干扰能力强,适用于具有非线性的FOG输出数据[16]。如果PE值大于设定值,则认为序列为噪声序列,否则近似认为平稳序列。
4) 经过步骤3)的PE检测后,如果式(3)中所得的IMF分量是噪声序列,则继续执行步骤1),直至该IMF分量平稳。
5) 将已分解得到的相对平稳的IMF分量从原始信号中分离出:
6) 对式(4)中得到的剩余信号进行EMD分解,将所得到的所有IMF分量按照频率的高低进行排列。
针对FOG数据序列中隐藏的噪声序列,通过MEEMD分解设置排列熵阈值,以实现对噪声序列的检测并对其进行滤除,为分解后FOG输出数据的处理提供了准确的IMF分量;同时MEEMD方法在模态混叠现象中的抑制,在一定程度上提高了分解效率及精确性。
2.2 信号去噪
在信号去噪方面,采用FLP滤波算法。通过对时刻之前的信号与设置的权重相乘,实现对时刻的信号预测。在应用中,通常设置初始权重值为0,然后通过迭代,运用最小均方差理论最小化当前时刻和预测值之间的差值,最终获得一个稳定收敛的权重值。
FOG输出数据在时刻的估计值为

根据最小均方误差准则,定义FLP滤波均方差为

2.3 算法实现
结合对FOG输出数据的分析,并通过2.1与2.2节中MEEMD分解和FLP滤波处理,实现对FOG输出数据的去噪,其步骤为
1) 在MEEMD分解过程中,通过设定PE阈值,将FOG输出数据分解为

分别将式(9)中的三组IMF分量记为噪声IMF分量、混合IMF分量以及余项IMF分量。在实际应用中,针对不同的IMF分量分别进行处理,以实现FOG输出数据的去噪。
2) 针对MEEMD分解过程中得到的第+1至第个分量(混合IMF分量)进行分析,这些IMF分量中包含了噪声和输出信号,通过FLP滤波算法进行噪声滤除,从而实现对IMF分量中有效信号的提取。通过对混合IMF分量进行更进一步的FLP处理,可以有效提高对FOG输出数据的降噪精度。
3) 针对MEEMD分解过程中得到的第+1至第个分量(余项IMF分量)进行分析,余项IMF分量反映了FOG数据序列的趋势项,包含着FOG数据序列的信息。在实际处理过程中对余项IMF分量予以保留。
4) 经过对噪声IMF分量的滤除,以及步骤2)和步骤3)的处理,处理后的FOG输出数据可表示为

通过对原始FOG输出数据进行MEEMD-FLP去噪,利用排列熵定义有效地对FOG输出数据中的噪声进行检测滤除;同时,对混合IMF项进行FLP滤波去噪,提升了对混合IMF项中所包含数据的提取能力,在保证对FOG输出数据去噪能力的同时,最大限度地还原了有效信号。
MEEMD-FLP算法框图如图1所示。在分解过程中,通过设置排列熵阈值,对FOG输出信号中的较为强烈的噪声进行滤除,这一步骤提升了FOG输出信号噪声滤除过程中的效率,避免了对噪声信号的复杂处理;FLP滤波算法的引入,提升了FOG输出信号去噪的精确性;最后通过对MEEMD-FLP处理之后的信号进行重构,完成FOG输出数据的滤波。
3 测量实验与结果
为验证MEEMD-FLP去噪算法的有效性,采集陀螺50 ℃下的静态漂移数据作为样本。将陀螺组件安装在带有温控箱的水平转台上;为消除陀螺的标度因素对陀螺温度漂移的影响,保证陀螺的输入角速度为零。因此,将陀螺输入参考轴置于水平面内,并使参考轴与北向之间夹角为零,即可满足条件。在实验过程中,受到外界干扰及陀螺自身特性影响,不可避免地为输出数据带来噪声。常温下通电进行性能测试,性能测试完成后,组件不断电,采样频率为4 Hz,输出单位为°/h,选取一组光纤陀螺静态漂移数据。
光纤陀螺的原始含噪信号如图2所示。其中包含着大量噪声,此时若直接对信号进行分析建模,会存在着极大的误差,抑制了FOG输出数据的应用。因此,针对图2中的FOG信号,需要对其进行去噪处理,以保证信号的真实性与准确性。
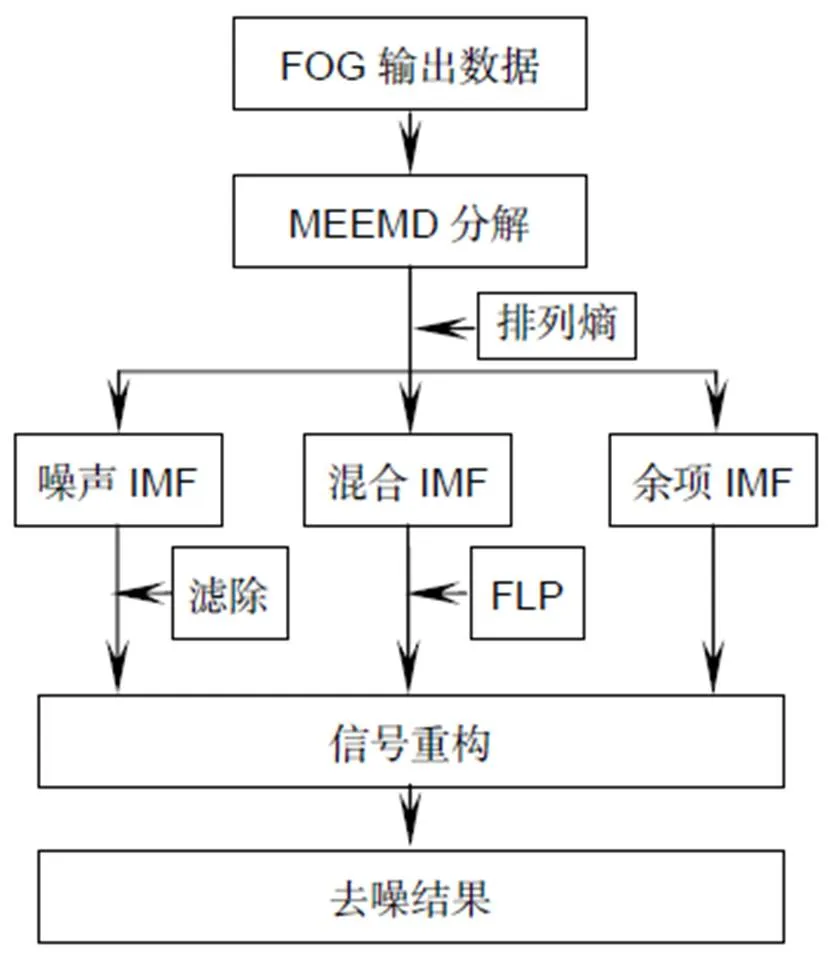
图1 MEEMD-FLP算法流程图
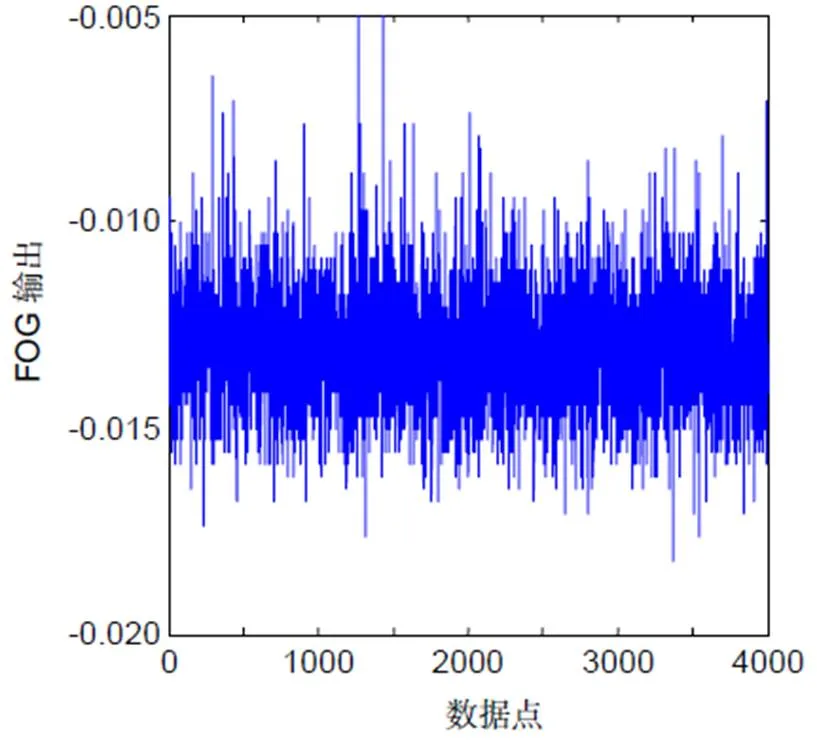
图2 光纤陀螺的原始含噪信号
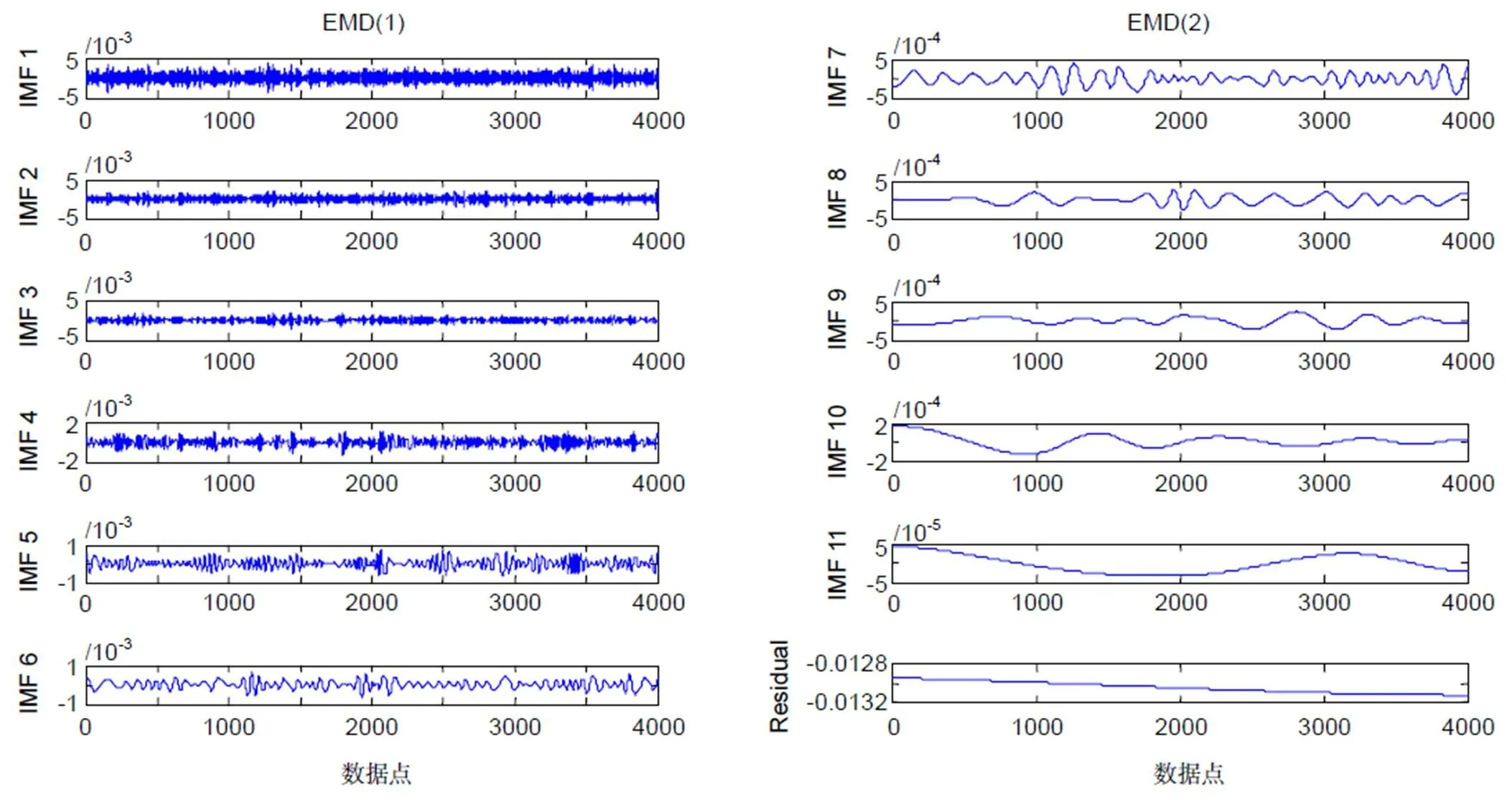
图3 EMD分解结果
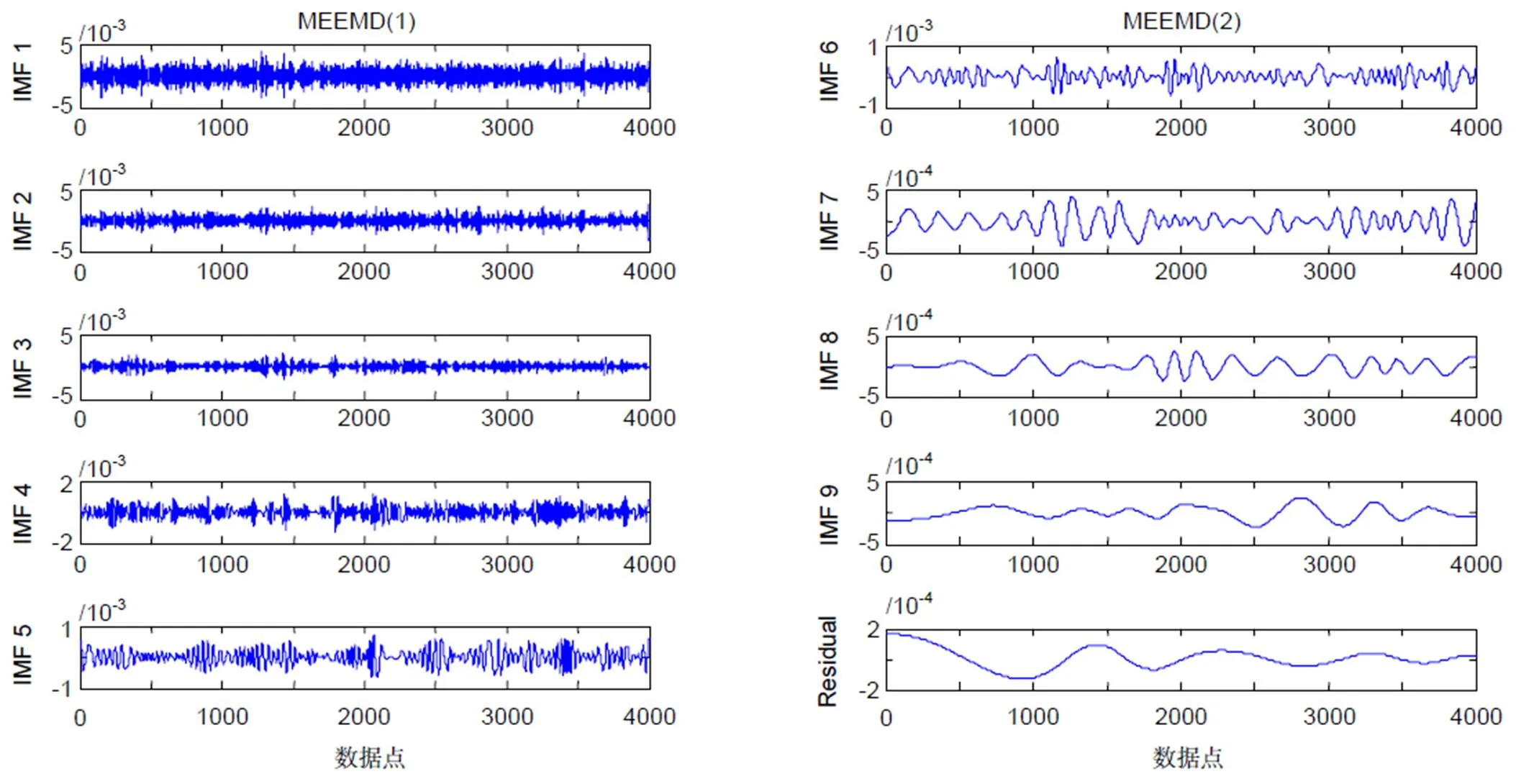
图4 MEEMD分解结果
以EMD分解与MEEMD分解作为基本分解方法,其结果如图3、4所示。经过EMD分解之后,共得到11个IMF分量及趋势项;经过MEEMD分解之后,共得到9个IMF分量及趋势项,有效抑制了模态混叠现象,降低了模态分解数量。
采用排列熵算法对MEEMD分解后的IMF分量进行检测,得到9个IMF分量的PE值如图5所示。
在MEEMD分解过程中,通过设置排列熵,将噪声信号进行滤除,同时采用排列熵对混合模态进行检测,确定混合模态数量。根据文献实验可知,通常设置PE>0.6为异常信号,本文结合FLP去噪效果及信号模态分析,设置[0.2,0.6]区间为混合模态[17]。结合图5所得结果,选取MEEMD分解之后的前三个模态函数为混合模态,IMF1、IMF2、IMF3及其对应的FLP去噪结果如图6所示。
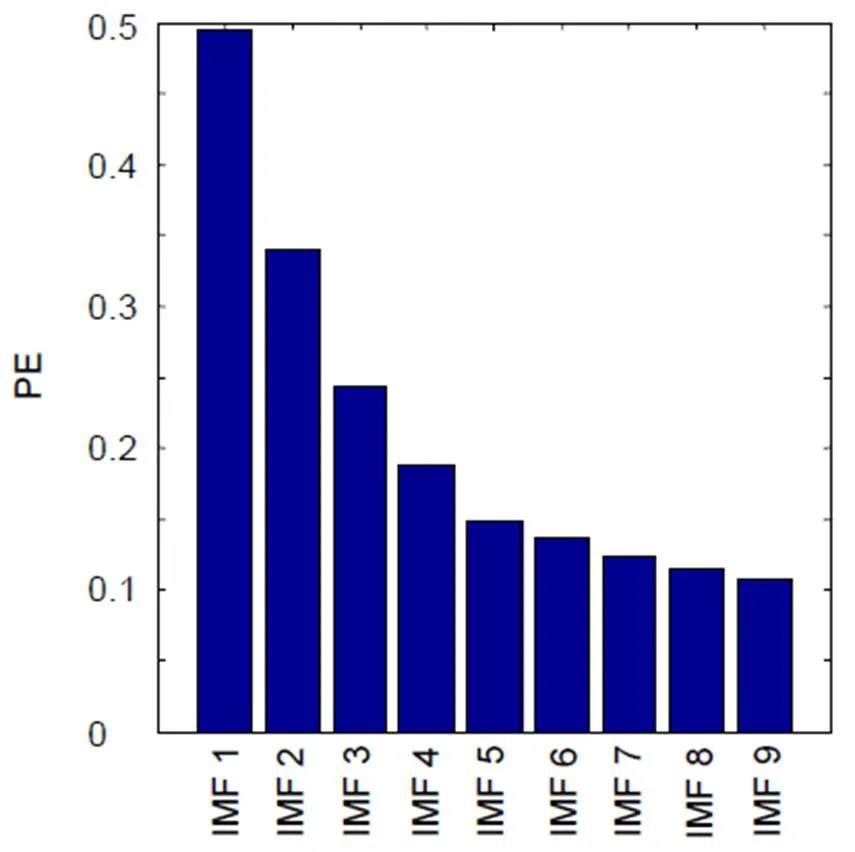
图5 序列的排列熵
如图6所示,经过MEEMD-FLP对前三项IMF的处理之后,滤除了前三项IMF中包含的大量噪声,且通过对IMF3的FLP去噪结果分析可知,根据排列熵准则选取前三项IMF分量作为混合模态,符合MEEMD-FLP去噪方法的精度要求。经过FLP去噪、EMD去噪及MEEMD-FLP去噪结果与原始FOG数据的对比图如图7所示。
相比于FLP去噪算法(图7(b))及EMD去噪算法(图7(c))而言,MEEMD-FLP去噪算法(图7(d))根据排列熵准则,在对FOG数据分解的过程中即实现了对噪声项的滤除,有效减少了噪声IMF项的产生及其对后续分解过程的影响,并降低了IMF分量的数量;同时,利用排列熵准则选取MEEMD分解过程中产生的混合模态,并利用FLP去噪算法对混合模态进行去噪处理,更进一步降低了混合模态中包含的噪声,有效地实现了对FOG数据的降噪处理。
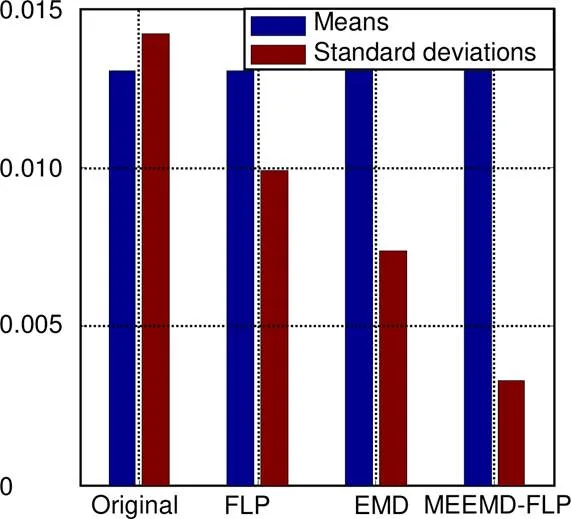
三种去噪方法所得去噪结果的均值和标准差如图8所示。在图8中,为了便于查看,将均值取相反数,并将标准差倍数扩大十倍,以凸显对比效果。经过三种去噪方法对原始FOG输出信号进行去噪后,基本保持信号均值不变,最大限度地保留了FOG真实信号,滤波后的信号能量损失少;通过FLP、EMD及MEEMD-FLP去噪算法所得去噪结果的标准差统计结果可知,MEEME-FLP对分解后的分量进行FLP去噪,有效降低了混合模态中的噪声分量,具有更小的标准差,在性能上更具有优越性。
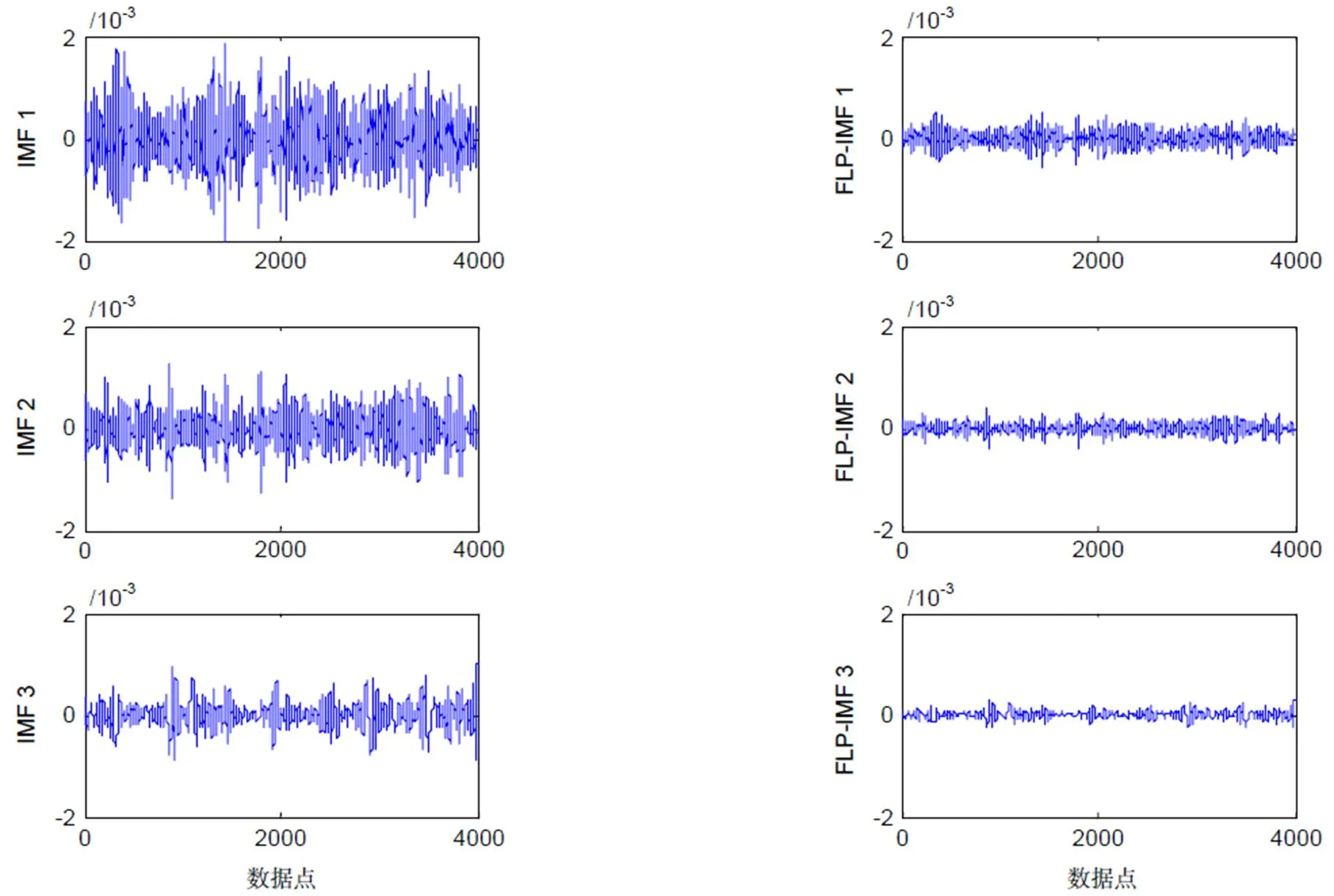
图6 MEEMD-FLP处理结果
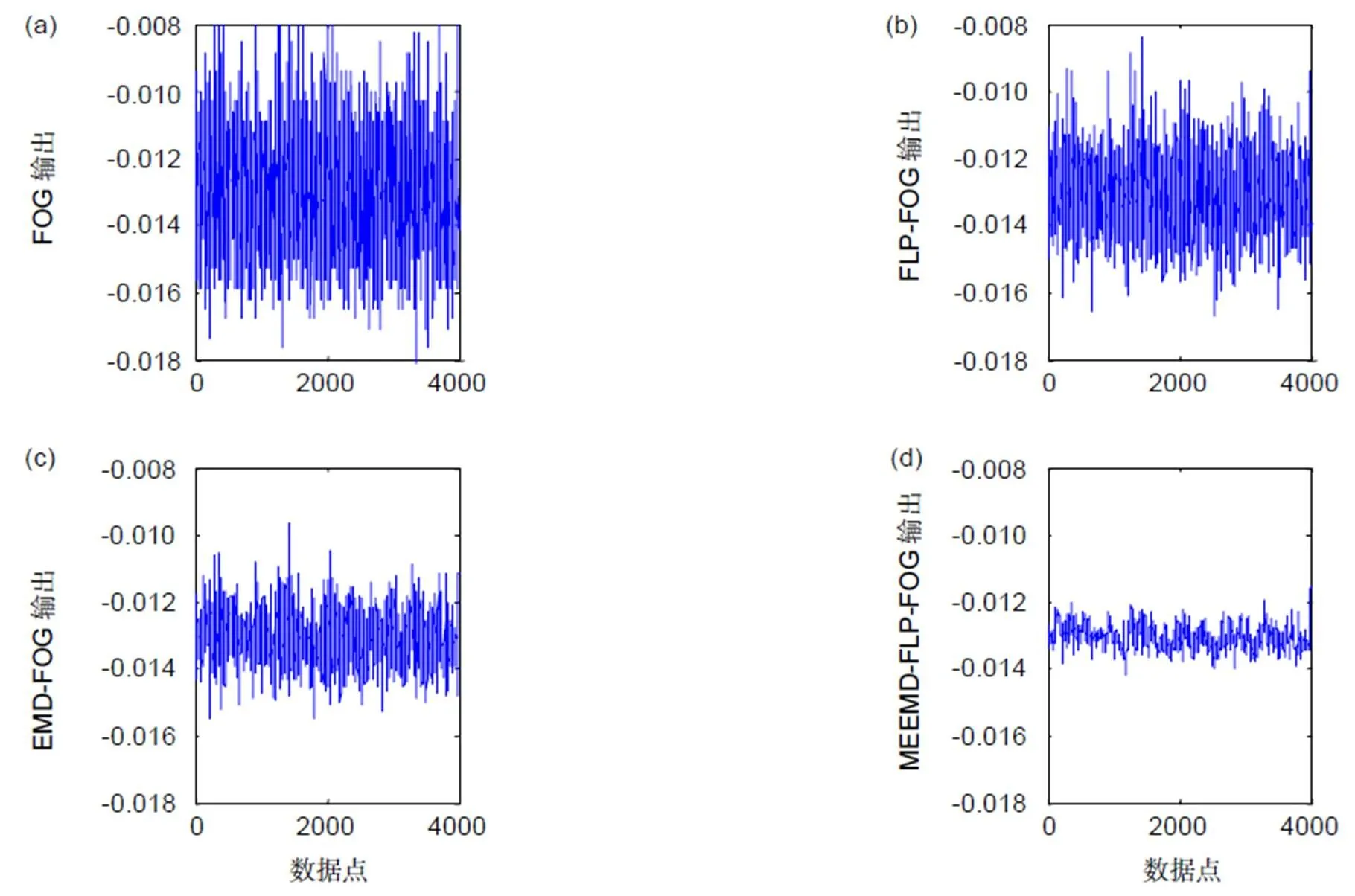
图7 三种去噪方法的性能对比
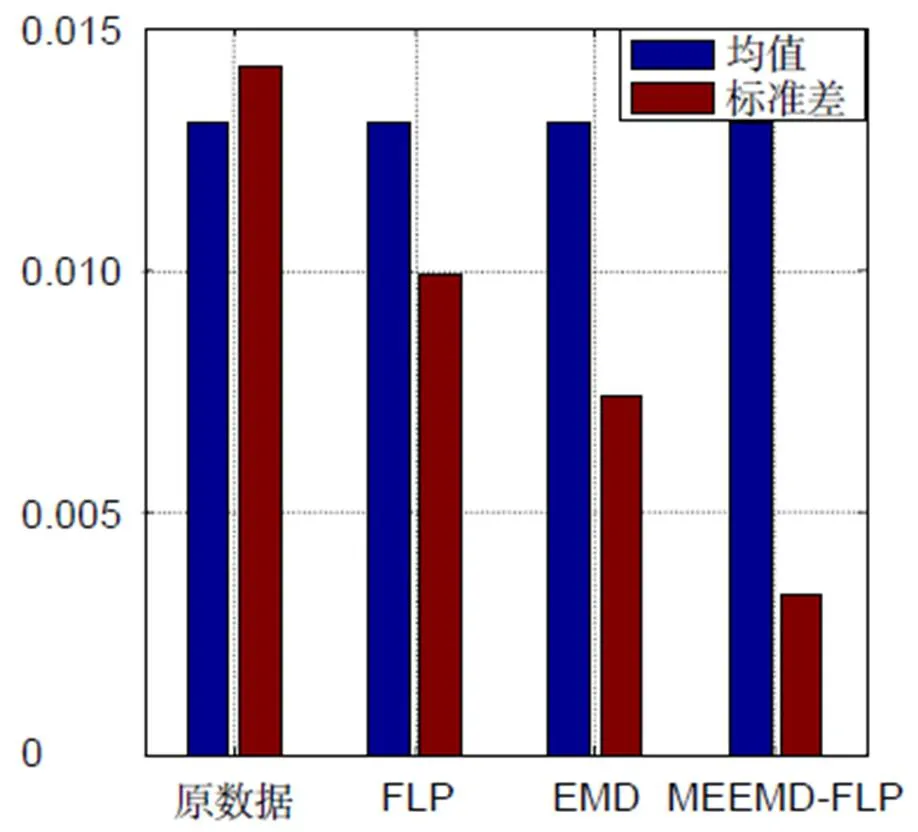
图8 去噪后的均值及标准差
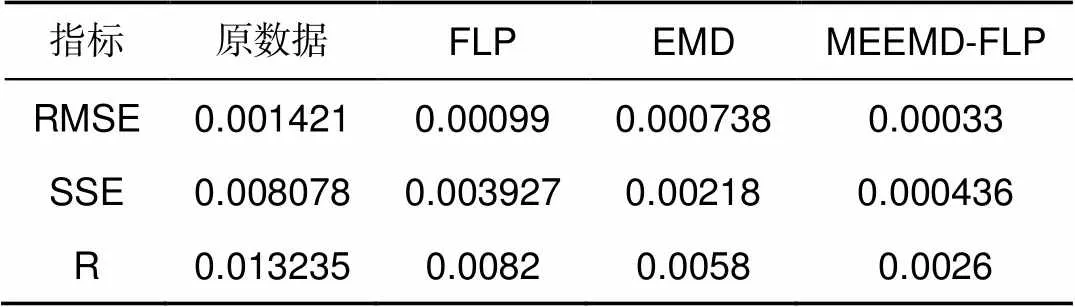
表1 三种去噪方法的性能对比
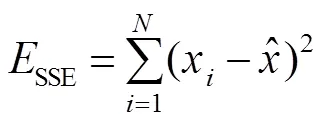
以数值方式客观地对比去噪结果,选取均方根误差(root mean squared errors,RMSE,用RMS表示)、均方误差(sum of squared error,SSE,用SSE表示)和极差(range,R)作为衡量去噪效果的指标[18]:
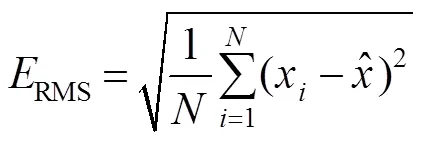
通过对表1、图7及图8中对三种去噪方法的对比分析可知:相比FLP去噪算法和EMD去噪算法,采用MEEMD-FLP算法去噪后的信号效果更好;通过指标分析可知,与原数据相比,经过FLP去噪之后的RMSE降低了30.33%;经过EMD去噪之后的RMSE降低了48.06%;经过MEEMD-FLP去噪之后的RMSE降低了76.77%;以标准差为指标进行衡量,与原始FOG输出相比,FLP去噪算法降低了30.28%;EMD去噪算法降低了48%;MEEMD-FLP去噪算法降低了76.76%;结果表明MEEMD-FLP算法的去噪能力要优于FLP去噪算法及经验模态分解。
4 结 论
为了有效降低FOG输出信号中的噪声,提高FOG的使用效能,本文结合EMD分解与FLP滤波算法的优势,并针对EMD分解过程中的模态混叠现象,提出了一种新的MEEMD-FLP去噪方法;该方法利用MEEMD分解将原始FOG输出信号分解为多个IMF分量,并通过排列熵检测,实现对噪声项、混合项及余项的分离;针对分离出的混合项,采用FLP滤波算法进行去噪处理,有效地提高了去噪精度。通过一组FOG静态输出信号对本文提出的MEEMD-FLP去噪算法进行了验证,结果表明:
1) 通过MEEMD分解算法,可以有效缓解模态混叠现象,提高分解能力。
2) 通过对IMF分量进行排列熵分析,可以有效判断信号的复杂程度,实现对噪声项、混合项及余项的判断。
3) MEEMD-FLP算法可以有效降低噪声对FOG输出信号的影响,具有更高的去噪精度。
[1] Liu W T, Liu J Y, Shen Q. Integrated modeling and filtering of fiber optic gyroscope’s random errors[J]., 2018, 45(10): 180082.
刘文涛, 刘洁瑜, 沈强. 光纤陀螺随机误差的集成建模及滤波处理[J]. 光电工程, 2018, 45(10): 180082.
[2] Song N F, Ma K, Jin J,. Modeling of thermal phase noise in a solid core photonic crystal fiber-optic gyroscope[J]., 2017, 17(11): 2456.
[3] Chen X Y, Shen C. Study on error calibration of fiber optic gyroscope under intense ambient temperature variation[J]., 2012, 51(17): 3755–3767.
[4] Chen S T, Sun F, Gao W,. Research on the noise control technology in FOG based on NLMS algorithm[J]., 2009, 30(3): 521–525.
陈世同, 孙枫, 高伟, 等. 基于归一化LMS算法的光纤陀螺降噪技术研究[J]. 仪器仪表学报, 2009, 30(3): 521–525.
[5] Zheng J X, Dai D K, Wu W,. Ship angular flexure measurement method based on ring laser gyro units[J]., 2019, 46(1): 180556.郑佳兴,戴东凯,吴伟, 等. 基于激光陀螺组合体的船体角形变测量方法[J]. 光电工程, 2019, 46(1): 180556.
[6] Zhang L, Ye S, Liu F,Detection method for the singular angular velocity intervals of the interferometric fiber optic gyroscope scale factor[J]., 2016, 127(22): 10412–10420.
[7] Jin J, Zhang T, Kong L H,. In-orbit performance evaluation of a spaceborne high precision fiber optic gyroscope[J]., 2018, 18(1): 106.
[8] Dang S W, Tian W F, Qian F. De-noising fractional noise in fiber optic gyroscopes based on lifting wavelet[J]., 2009, 36(3): 625–629.
党淑雯, 田蔚风, 钱峰. 基于提升小波的光纤陀螺分形噪声滤除方法[J]. 中国激光, 2009, 36(3): 625–629.
[9] Shen C, Chen X Y. Denoising algorithm for FOG based on wavelet packet transform and FLP algorithm[J]., 2011, 41(5): 978–981.
申冲, 陈熙源. 基于小波包变换与前向线性预测滤波的光纤陀螺去噪算法[J]. 东南大学学报(自然科学版), 2011, 41(5): 978–981.
[10] Wang Q H. Research of gyro random error modeling based on the wavelet and DRNN[J]., 2015(4): 16–20.
王庆贺. 基于小波去噪与DRNN的光纤陀螺随机误差建模研究[J]. 航空兵器, 2015(4): 16–20.
[11] Cui B B, Chen X Y. Improved hybrid filter for fiber optic gyroscope signal denoising based on EMD and forward linear prediction[J]., 2015, 230: 150–155.
[12] Fang L, Shen C, Chen X Y. Error analysis and compensation for Fiber Optic Gyroscope under vibration based on wavelet multi-scale analysis[J]., 2012, 25(7): 902–906.
方琳, 申冲, 陈熙源. 基于小波多尺度变换的光纤陀螺振动误差分析与补偿[J]. 传感技术学报, 2012, 25(7): 902–906.
[13] Zhang Q, Zhou X F, Wang J,. Ultrasonic signal denoising based on improved EMD[J]., 2016, 36(2): 49–55.
张樯, 周西峰, 王瑾, 等. 基于改进的EMD超声信号降噪方法研究[J]. 南京邮电大学学报(自然科学版), 2016, 36(2): 49–55.
[14] Huang N E, Shen Z, Long S R,. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis[J]., 1998, 454(1971): 903–995.
[15] Zheng J D, Cheng J S, Yang Y. Modified EEMD algorithm and its applications[J]., 2013, 32(21): 21–26, 46.
郑近德, 程军圣, 杨宇. 改进的EEMD算法及其应用研究[J]. 振动与冲击, 2013, 32(21): 21–26, 46.
[16] Bandt C. Permutation entropy and order patterns in long time series[M]//Rojas I, Pomares H.. Cham: Springer, 2016.
[17] Feng F Z, Rao G Q, Si A W,. Application and development of permutation entropy algorithm[J]., 2012, 26(2): 34–38.
冯辅周, 饶国强, 司爱威, 等. 排列熵算法的应用与发展[J]. 装甲兵工程学院学报, 2012, 26(2): 34–38.
[18] Wang W J, Lu Y M. Analysis of the mean absolute error (MAE) and the root mean square error (RMSE) in assessing rounding model[J]., 2018, 324(1): 012049.
De-noising algorithm for FOG based on MEEMD and FLP algorithm
Dai Shaowu1, Chen Qiangqiang1,2*, Liu Zhihao3, Dai Hongde1
1Naval Aviation University, Yantai, Shandong 264000, China;2Naval 92728, Shanghai 200040, China;3Naval 92214, Ningbo, Zhejiang 315000, China
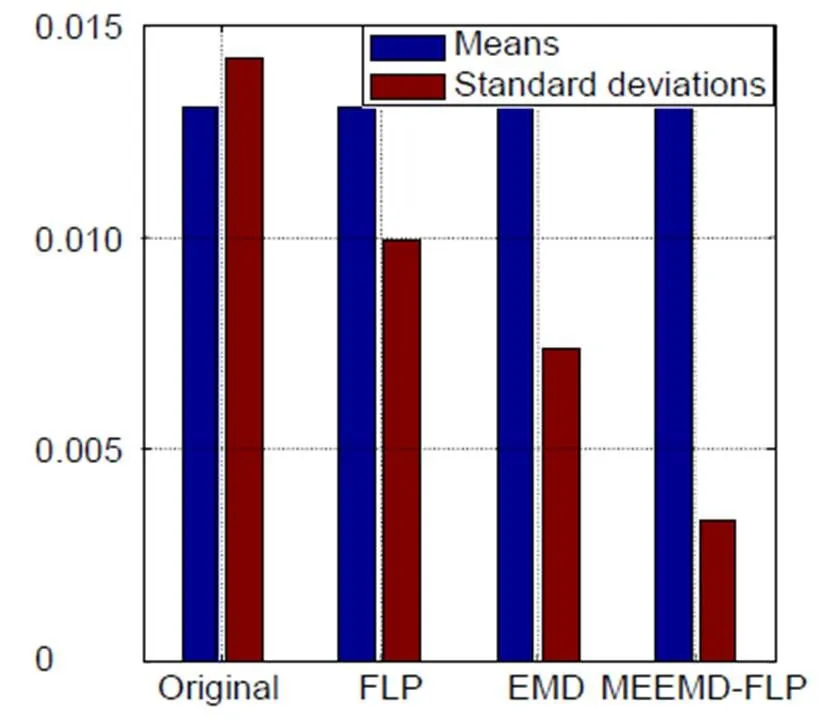
Standard deviations and means of the FOG outputs after de-noising
Overview:Fiber optic gyroscope (FOG) is a new inertial sensor based on the Sagnac effect and it is widely used in servo control, flight control and inertial navigation. It has the advantages of high reliability, high measurement accuracy, and ease of integration. It has become an ideal device for inertial navigation systems. The collected fiber optic gyroscope drift data is affected by many factors such as the light source, fiber bending, and ambient temperature, making it often submerged in the noise and leading to difficulties in direct modeling compensation. In order to establish an accurate error compensation model, data preprocessing is demanded to output data on the gyroscope.
In order to reduce the influence of noise on the output signal of fiber optic gyroscope, a de-noising algorithm of fiber optic gyroscope signal based on modified ensemble empirical mode decomposition (MEEMD) and forward linear prediction (FLP) is proposed. At the beginning, we studied the output signal of fiber optic gyroscope in depth and discovered that it is complicated that we cannot reduce the noise directly. As a result, the concept of permutation entropy (PE) is introduced. PE is a new algorithm proposed for detecting the randomicity and dynamic changes of time series, which can be used in the field of time series analysis. According to the PE theory, MEEMD algorithm is proposed and the fiber optic gyroscope signal is decomposed and reconstructed. Then, the low-order IMF terms of the mixed noise after decomposition is filtered and de-noised by the FLP algorithm. Finally, the signal processed by the MEEMD-FLP is reconstructed to get the result. The static test of a fiber optic gyroscope is carried out. The experimental results show that compared with the original fiber optic gyroscope signal, the RMSE after de-noising is reduced by 76.77%, and the standard deviation is reduced by 76.76%. It can effectively reduce the influence of noise on the fiber optic gyroscope output signal and has higher de-noising accuracy.
In a word, compared with the existing methods, the proposed method is applied to the original fiber optic gyroscope signal’s adaptive analysis and de-noising modeling, which is completely adaptive instead of other man-made settings, such as the choice of wavelet basis function in the wavelet transform. It improved the de-noising accuracy of the system while reducing the influence of noise. We can predict that the method provides a new perspective for the analysis and de-noising of the fiber optic gyroscope’s signal.
Citation: Dai S W, Chen Q Q, Liu Z H,De-noising algorithm for FOG based on MEEMD and FLP algorithm[J]., 2020, 47(6): 190137
De-noising algorithm for FOG based on MEEMD and FLP algorithm
Dai Shaowu1, Chen Qiangqiang1,2*, Liu Zhihao3, Dai Hongde1
1Naval Aviation University, Yantai, Shandong 264000, China;2Naval 92728, Shanghai 200040, China;3Naval 92214, Ningbo, Zhejiang 315000, China
In order to reduce the influence of noise on the output signal of FOG, a de-noising algorithm of FOG based on modified ensemble empirical mode decomposition (MEEMD) and forward linear prediction (FLP) is proposed. Firstly, the concept of permutation entropy is introduced, and the FOG signal is decomposed and reconstructed by using MEEMD. Secondly, the low-order IMF terms of the mixed noise after decomposition is filtered and de-noised by the FLP algorithm. Finally, the signal processed by the MEEMD-FLP is reconstructed to get the result. The static test of a FOG is carried out. The experimental results show that compared with the original FOG signal, the RMSE after de-noising is reduced by 76.77%, and the standard deviation is reduced by 76.76%. It can effectively reduce the influence of noise on the FOG output signal and has higher de-noising accuracy.
fiber optic gyroscope; signal de-noising; empirical mode decomposition; FLP algorithm
TP212
A
10.12086/oee.2020.190137
: Dai S W, Chen Q Q, Liu Z H,. De-noising algorithm for FOG based on MEEMD and FLP algorithm[J]., 2020,47(6): 190137
戴邵武,陈强强,刘志豪,等. 基于MEEMD与FLP的光纤陀螺去噪[J]. 光电工程,2020,47(6): 190137
Supported by the Natural Science Foundation of Shandong (ZR2017MF036)
* E-mail: 1195275597@qq.com
2019-03-25;
2019-11-16
山东省自然科学基金面上项目资助(ZR2017MF036)
戴邵武(1966-),男,博士,教授,主要从事飞行器综合导航的研究。E-mail:634382204@qq.com
陈强强(1993-),男,博士研究生,主要从事飞行器综合导航的研究。E-mail: 1195275597@qq.com
