城市轨道交通信号故障下列车应急运行控制研究
2020-07-04张爽潘晓军张强
张爽 潘晓军 张强


摘 要:随着城市轨道交通客流量快速增长,信号系统在保障列车运行安全方面越来越重要。信号系统故障会导致中心调度员无法快速掌握现场列车运行情况,同时影响司机人工驾驶的安全和效率。文章结合超宽带(UWB)通信定位技术、列车智能检测系统(TIDS)技术、接入点(APN)公网通信及视频信号人工调用等技术,实现故障应急情况下列车运行控制。通过研制相应设备,开展单传感器试验、多传感器融合试验、系统功能试验,最终验证系统满足故障应急情况下的列车运行效率要求,有力支撑城市轨道交通安全、高效运营。
关键词:城市轨道交通;信号系统;UWB 通信定位技术;TIDS 技术;APN公网通信
中图分类号:U231+.7
1 背景
城市轨道交通大规模发展对信号系统提出更高要求,在保证列车运行安全的同时,还需不断缩小列车运行间隔、加大列车运行密度。信号系统发生故障情况(单车或多车信号系统发生故障)将带来2个主要问题:①中心调度员无法在第一时间准确获知故障列车具体位置及故障列车周围环境情况,需要经过一系列管理手段进行确认,效率低且安全性差,对运营产生较大影响;②列车采用降级人工驾驶模式恢复运营,人工驾驶存在工作状态不稳定,易受弯道、坡道、照明不良等线路视距环境限制,进而导致运营效率下降、安全性受到影响。
目前信号系统定位列车一般采用轮轴计+轨旁射频识别(RFID,Radio Frequency Identification)应答器等多装置联合判断的方式,系统较复杂且无法获取列车周边环境的有效信息。为提高整个信号系统的效率和可靠性,需要一个成熟、相对独立的列车定位系统作为一般信号定位方式的冗余备用模式,当现有系统发生故障时,可实现快速切换,确保整个系统的正常运行。
2 解决方案
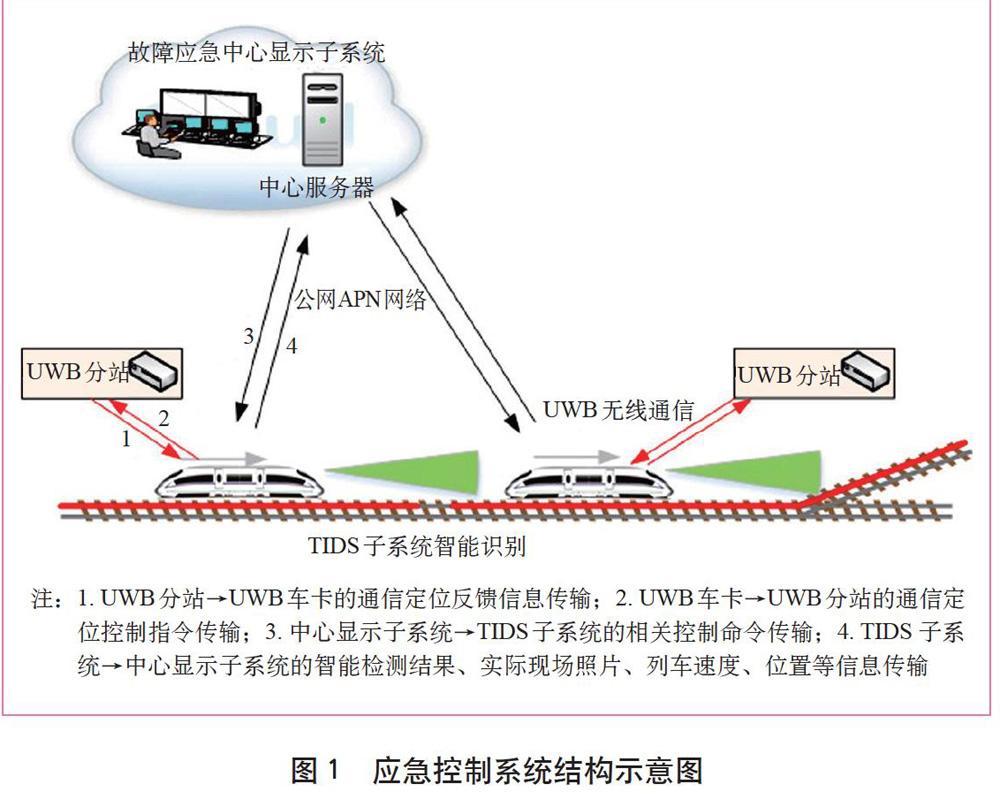
在信号系统故障情况下,中心调度员需在第一时间准确获知故障列车位置以及故障列车周围环境情况,以做出正确的运营组织指挥指令。通过UWB无线技术可实现在线列车定位;同时TIDS子系统采用智能检测设备感知环境并获取数据,通过智能算法实现前车、信号机、道岔及其他障碍物的检测,并根据追踪距离进行报警,辅助防护列车运行安全;通过APN公网通信技术,结合运行列车前方的相关障碍物以及现场实际情况,将障碍物信息结合现场图片回传至中心显示子系统,中心调度人员可在第一时间获取现场情况信息。应急控制系统结构如图1所示,包含TIDS子系统、中心显示子系统和UWB通信定位子系统,各子系统间相互进行数据传输。
2.1 TIDS 子系统
TIDS子系统可根据线路弯度和坡道情况正确调整系统的识别距离,以保证识别结果的准确性和可靠性。TIDS子系统由TIDS主机、人机界面(HMI)显示单元、外围传感器组成。外围传感器包含激光雷达、长焦相机、广角相机,通过几种传感器的配合,识别列车前方的列车、信号机、道岔和其他障碍物等信息。TIDS主机单元对多种传感器数据进行融合,计算安全运行距离和限制速度,通过HMI显示器输出显示并进行声光报警。HMI作为列车智能检测子系统的人机界面,显示最高限速、前方安全运行距离和列车实时位置等信息。
对于列车运行轨道,TIDS子系统为驾驶员提供300 m级别距离防护功能,根据实际线路弯道和坡道情况,并通过HMI显示器输出显示和声光报警。基于主动检测技术可排除对向运行列车干扰,同时能够根据最新状态检测情况将结果显示在人机界面上。TIDS子系統功能示意如图2所示。
2.2 中心显示子系统
TIDS子系统将UWB定位信息发送给中心显示子系统,中心显示子系统发送控制命令,将TIDS系统检测障碍物信息结合现场图片回传至控制中心,中心调度人员可在第一时间获取现场信息。另外,在获取列车位置信息的基础上,中心显示子系统汇总线路上所有列车位置信息,结合实际正线线路图,实现列车实际位置信息在线路图上间隔显示。中心显示系统界面如图3所示。
2.3 UWB 通信定位子系统
UWB通信定位子系统视距定位精度可达20~30cm,整个子系统由车载设备、轨道设备和服务器软件组成。为获取列车定位信息,在每列车上安装UWB车卡。通过UWB车卡向地面基站设备发送通信定位控制指令,接收地面基站的反馈信息,进行周期车卡位置检测,最后将周期计算出的列车位置和设备状态信息发送给TIDS子系统。
UWB通信定位子系统车载设备部署采用在所有列车车头、车尾驾驶室内部同一位置安装定位分站作为车载定位器,车载定位器天线安装在列车前挡风上部固定位置,实现与轨道基站测距。同时在列车车头和车尾同时部署TIDS主机,主机通过以太网线连接定位器,实现定位数据的位置计算。TIDS主机接入公网,实现地图、算法更新。定位设备安装俯视示意如图4所示。
由于多轨情况下需要区分列车所在轨道,一般通过车载设备同时与2台轨道设备测距定位,但地铁隧道比较狭窄,无法在所有场景满足车载设备同时与多台轨道设备测距的需求,故采用飞行时间法(TOF)来实现定位。
UWB子系统轨道设备部署与相关定位如图 5所示,A、B 为部署在隧道侧壁上的基站天线,2根天线的距离一般大于3 m。C 为部署在列车上的车卡天线。L1、L2为定位器与天线A、B分别测得的距离,H为天线C到直线AB的距离。车辆行驶方向可用连续得到的车辆位置信息的变化计算出。车辆位置可分情况计算,远距离时直接使用L2;近距离时使用L2、H根据勾股定理计算;同时根据L1、L2的大小不同,可判断车辆在天线的左右侧。
UWB基站安装示意如图6所示,A、B 为部署在隧道侧壁上的基站天线,C、D 为部署在列车上的车卡天线。L为2根天线的距离,L1、L2、L3、L4为定位器C、D与天线A、B 分别测得的距离,H1为天线C到直线AB的距离,H2为天线D到直线AB的距离。
3 应用现场验证
为验证本系统在故障应急情况下列车运行控制过程中的有效性,在北京地铁10号线莲花桥六里桥西局,实际三站两区间进行2辆列车动车测试,分别对TIDS子系统、UWB定位子系统和中心显示子系统的现场测试效果进行分析。
3.1 TIDS 子系统
TIDS系统三站两区间2辆列车动车测试效果如下。
(1)弯道识别效果如图7所示,识别距离≥78 m,误差≤±1 m。
(2)坡道识别效果如图8所示,识别距离≥150 m,误差≤±1 m。
(3)直道识别效果如图9所示,识别距离≥200m,误差≤±1 m。
3.2 中心显示子系统
中心显示子系统三站两区间2辆列车动车测试效果如图10所示。该子系统刷新频率符合预期小于1s,UWB锚点定位和TIDS子系统速度积分定位精度小于5m,可实现车辆前方显示并存储、获取列车前方图片功能。
3.3 UWB 定位子系统
基于UWB锚点定位和TIDS子系统速度积分定位,现场测试验证了列车初始定位、方向判断、区间位置校准功能。在结合速度积分进行定位时,在北京地铁10号线莲花桥六里桥西局三站两区间实现现场定位需求,误差在±5 m以内。
4 结语
本文针对单车或多车信号系统发生故障情况下,利用UWB通信定位技术、TIDS技术、APN公网通信和视频信号人工调用等技术,实现故障应急情况下列车运行控制。当线路系统故障时,可通过TIDS子系统检测列车前方线路障碍物和前方列车距离,对列车的安全运行进行防护。地面调度室可根据UWB定位信息在地面中心显示子系统实时显示每列车的位置及周边环境情况。系统于2019年已在北京地铁10号线得以成功应用,可大大提升信号系统故障情况下运营安全性和时效性。系统安装简单且可独立实施,为降低信号系统升级改造风险、提高改造工程效率奠定了重要基础。
参考文献
[1]蔡伯根. 低成本列控系统的列车组合定位理论与方法[D].北京:北京交通大学,2010.
[2]李森林,李潇萧. TIDS系统及其在苏州有轨电车2号线的应用[J]. 都市快轨交通,2017(8):96-101.
[3]李慧鹏. 基于UWB技术的无线传感网络在轨道交通中的应用研究[J]. 铁道通信信号,2015,51(Z1):51-53.
[4]王明东,戴亚文,范俊,等. 基于UWB技术的隧道无线定位方法研究[J]. 武汉大学学报,2016(8):56-60.
[5]王剑,张辉,蔡伯根,等. 基于HMM的列车轨道占用自动识别算法研究[J].铁道学报,2009,31(3):54-58.
[6]鲁秋子. 城市轨道交通延伸工程信号系统车地无线通信技术方案研究[J].现代城市轨道交通,2018(12):80-83.
[7]S. Ren, K. He, R. Girshick, et al. Faster r-cnn: Towards real-time object detection with region proposal networks[C]//Advances in Neural Information Processing Systems,2015(6): 91-99.
[8]J. Redmon, S. Divvala, Girshick, et al. You only look once: Unified, real-time object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2015(6):779-788.
[9]北京时间生活.北京:交通调查发布轨道交通出行比例大幅提高[EB/OL]. (2016–07–08). http://www.chinahighway.com/news/2016/1033074.php.
[10] N. L. Kazanskiy, S. B. Popov. Integrated design technology for computer vision systems in railway transportation [J].Pattern Recognition and Image Analysis,2015,25(2):215-219.
[11] 肖衍,苏立勇. 轨道交通全自动驾驶系统集成技术研究[J].中国铁路,2015,5(5):109-113.
[12] 金华. 城市轨道交通全自动无人驾驶信号系统功能分析[J].铁路计算机应用,2014,23(1):61-64.
[13] J. Long, E. Shelhamer, T. Darrell. Fully convolutional networks for semantic segmentation[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2014(11): 3431-3440.
[14] L. C. Chen, G.Papandreou, I. Kokkinos, et al. Semantic image segmentation with deep convolutional nets and fully connected crfs[J]. arXiv:1412.7062,2014(12):124-138.
[15] 陳建国,方鸣,凌晨,等. 轨道交通信号系统故障-安全结构危害识别和危害率计算[J].现代城市轨道交通,2019(3):59-63.
收稿日期 2020-02-03
责任编辑 胡姬
