机器人自动焊接工作站设计
2020-07-04沈祥贾秋琳
沈祥 贾秋琳

摘 要:依托公司的重磅板机器人焊接工作站项目,从整个工作站的方案布局、各个设备选型、电气控制设计等方面介绍了整个机器人焊接工作站,并且分析了各个设备选型的依据,还介绍了部分设备主要技术参数。最后,通过重磅板产品进行了焊接工作站论证,此工作站的设计满足生产要求。
关键词:重磅板;机器人焊接;设备选型;工作站布局
0 引言
在“中国制造2025”战略指引下,上海振华重工着力打造高端制造产品,积极推动智能制造转型升级。工业机器人作为各大企业推动智能制造应用的主抓手,必然会给各个行业采用机器人带来发展,极大地推动生产自动化向前发展。重磅板作为公司轨道吊组成构件,重磅板作为公司产品构件的连接件都是采用人工焊接,由于人为因素常出现焊接质量不稳定、生产效率低下等不利因素,并且对劳动人员的身体影响极大,这些都是限制公司产品快速发展;因此,重磅板机器人自动化焊接是公司发展的需要,也是进行自动化焊接制造重要手段。
本文是依据已经投入公司生产运行的重磅板机器人焊接工作站作为研究对象,简要分析了整个机器人焊接工作站的设计与集成。
1 重磅板机器人焊接工作站的组成及布局
弧焊机器人焊接工作站的布局是根据产品的需求来设计的,机器人弧焊系统主要是由机器人、焊机、焊枪和电气控制等设备组成。对于重磅板弧焊机器人自动焊接工作站,设备主要是由发那科机器人、林肯焊机、焊枪、激光系统、简易的焊接工装以及电气控制柜等设备组成。
2 设备的选型
2.1 机器人选型
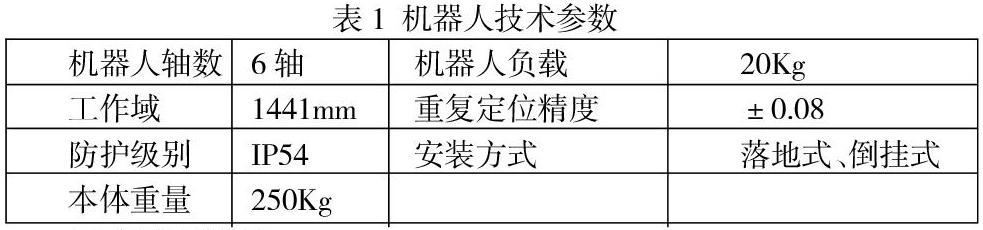
重磅板机器人焊接工作站选择的机器人型号为FANUC M-10iA,控制柜型号为R30iB,机器人具体的参数如表1所示。机器人手臂可以覆盖的范围为1.4米。此机器人属于中空结构手腕,电缆内置,第6轴手腕端部可承受的重量为20Kg。机器人通过采用高刚性手臂和先进的伺服技术,提高了机器人各个运动轴的加速度性能,缩短了动作时间,从而实现了高的生产率。此机器人的型号选择基于覆盖所需要焊接的工件直径变化的范围,确保机器人可达率为100%,机器人工作范围最大为1.441米。
2.2焊机的选型
焊机选择为林肯Power Wave? R500,此焊機具有高性能焊接系统,可以通过系统数据提高生产力,保证焊接质量降低成本等优势,在重工行业得到广泛应用。此焊机系统与FANUC机器人进行通讯,采用ArcLink,保证设备之间信号的传递,这样子可以确保机器人对焊机控制。
送丝机的型号为AutoDrive? 4R100,送丝机也是为林肯焊机品牌,此送丝机安装在机器人第3轴上,可以保证更稳定可靠的送丝,使用方便,驱动轮、送丝导向和压紧力调节无需任何工具。
2.3 水箱和焊枪的选型
重磅板选择的水箱型号为TBI becool 2.2,此水箱作用主要是给焊枪进行冷却的。在工作站设计时,水箱位置传感器通过电线接入到PLC控制柜中,当水箱中的水降到某一个位置时,整个工作站电气控制柜会通知三色灯进行报警,告诉操作者给水箱加水,保证了焊枪能够长久使用,不会被焊接的时候因没有冷却水将焊枪烧坏。
重磅板选择的焊枪型号为RM82W,依据工件焊接范围可达性选择此长度,本工作站选用的枪颈标准长度为200mm。根据产品的特征,选择合适的焊枪长度,且可以实现激光安装。
2.4 清枪装置和防撞器选型
重磅板机器人焊接工作站选择的清枪站型号为BRG-2-ES+DAE,TBI清枪装置包含焊枪清理、剪丝、喷硅油三个功能,通过信号控制整个设备的运动。重磅板机器人焊接工作站选择的防撞器为TBI-KS-2,此碰撞器可以保证设备的稳定性,在发生碰撞的情况下,发生紧急停止,保护设备,可以实现设备的长周期寿命。
2.5 激光焊接系统
本方案选择的激光系统为赛融Fuji-cam,此产品可以具有跟踪和寻位功能。由于产品种类的多样性,以及产品加工精确度存在误差,此焊接系统可以保证产品在焊接的过程中,准确找到焊缝位置的起始位置,以及产品在焊接过程中,一直保证焊枪处在指定的位置,实现焊接质量的稳定性。
3 电气控制设计
系统集成说明:全系统采用数字化处理,可通过通讯的方式和外界设备相连,程序间配置传感器检测动作信号,并且程序动作顺序互锁,保证安全及可靠性。在系统中设置有一系列检测装置和系统反馈装置。有情况发生时,系统将发出警报并且操作面板上指示灯亮。同时自动停焊、停机。
设备设有紧急停止开关,在紧急的情况下能立即停止设备的任何工作。设备设有红(设备报警或故障)、黄(设备暂停)、绿(设备正在运行)三种故障报警指示,并安装在设备明显位置。操作者能准确知道当前系统运行状态。
4 设备连接
机器人焊接工作站电缆连接要求是电缆线连接要紧固,线缆走线要规范整齐,要通过线槽走线,保证线缆的安全。
控制柜内外各元器件标识清楚,所有接线端标有清晰线号,相互连通的导线其线号统一,且各标识应与随机资料上的标注相同。采取可靠的防干扰措施,使设备在重型设备、焊接设备密集的厂房内能正常稳定的工作。控制柜外壳、各辅助电气设备、设备本体等均有可靠的接地保护,且各接地点不串接。
1)焊机和电控柜各自通过3相5线制接入车间总电源线控制柜。
2)机器人总电源线与PLC控制柜进行连接,进行动力输送。
3)PLC控制柜与外围传感器、水箱等通过电缆线进行连接。
4)焊机正极端子接入送丝机,焊机的负极采用螺栓连接到各个焊接工装台。
5)每个设备上必须要接地端子,保证设备的安全。
5 生产运用
通过对以上各个设备进行连接,和机器人焊接程序优化,开发出了一套可适用于生产运用的焊接工艺参数,并且进行了焊接生产论证,现场测试,焊缝成型美观,焊脚大小合适,符合技术要求。
6 结语
重磅板机器人焊接工作站是我公司作为推广弧焊机器人焊接工作站一个示范案例,对于推广机器人自动化焊接具有很重要的指导意义。本文主要简单介绍了一个工作站设备的主要组成部分,这样保证我司的产品可以实现自动化焊接,提高公司整体产品生产效率。
参考文献:
[1]从培兰.弧焊工业机器人工作站的集成[J].机械工程师,2016(9):117-118.
[2]汪励,陈小艳.工业机器人工作站系统集成[M].北京:机械工业出版社,2014.
