基于深度学习无人机控制系统设计
2020-07-04陈程
陈程
摘要:针对无人机控制系统受到外界干扰,而导致控制效果差的问题,提出了基于深度学习无人机控制系统设计。根据系统总体架构,以STM32为主控芯片,设计传感器,通过UART接口与PC端通信。以稳压器最大输出电流为基础设计电源模块,为系统供电。依据软件系统架构,设计具体控制方案,避免受到外界干扰,对促进无人机广泛应用具有重要意义。
关键词:深度学习;无人机;飞行;控制
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2020)15-0200-02
无人机是一种带有动力装置、能够自主飞行的无人驾驶飞行器,可以执行多种任务和多次使用的,其用途广泛、成本低、使用方便,在社会各应用领域得到了广泛的应用,如用于军事侦察、监视、反恐行动等,还可用于民用航空摄影、交通巡逻和对复杂危险区域的检查以及救灾等。由于无人机无须人员驾驶,不会存在人员伤亡风险,且机动性能好,能够执行人类无法到达的地方或某些危险区域的任务,应用前景非常广阔。当无人机在飞行过程中,由于无人直接操纵,需要自动调节其姿态、飞行速度和运行轨迹,甚至需要根据飞行任务的要求,自主进行飞行计划和轨迹规划嘲。因此无人机飞行控制系统极其重要,为实现无人机的自主飞行,得到所需控制的方向和距离,有效避开障碍,保证良好的控制效果,设计了一种基于深度学习无人机的控制系统。
1无人机系统总体结构设计
在无人机系统总体设计前首先要构建无人机飞行平台,用于进行系统研究和飞行试验,负责控制整个无人机系统。无人机飞行平台是无人机飞行的基础,也是其他飞行器的载体,要求重量轻,刚度大,强度高,应选择STM32作为主芯片,框架制作采用玻璃钢材料,电源模块负责为飞机控制系统、驱动系统和电机动力提供电源。
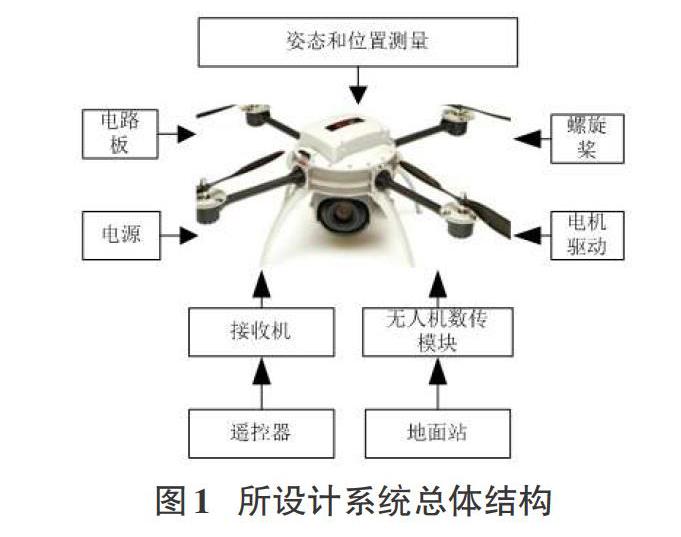
系统总体结构设计如图1所示。
系统采用STM32单片机作为主控芯片,主控核心是采集PPM信号并在远程控制上解码,从而达到预期的目标姿态。系统总体结构设计包括:航向基准系统、飞行控制系统、电源系统、驱动电路等部分;下半部分包括地面站系统、远动控制操作系统、数据链通信系统、未来将开发地面站系统;遥控操作系统采用7通道模式遥控器,数据链系统采用无线通信模块的设计方法。
1.1传感器
为提高飞行器飞行控制的可靠性,需要将飞行器的俯仰角和横摇角作为稳定回路的反馈信号引入到控制回路中,同时为提高系统的实时性,还需要通过角速率反馈增加阻尼。飞行器的飞行姿态是通过惯性测量装置得到的,该装置主要由三个陀螺仪、三轴加速度传感器和全向磁场传感器组成,通过GPS接收器和最大精度为15 cm的静压高度计获取飞机的位置信息。该飞行控制系統结合了上述传感器,构成了一个时态姿态参考系统,能够精准获取无人机自主飞行时所需的位置、姿态和飞行速度等相关信息。
尽管GPS广泛应用于导航、定位、测速等各个领域,但GPS信号经常受到地形和地物的影响,导致信号精度下降,影响正常使用。对于高层建筑林立的城市或植被茂密的山区,信号效果只有60%,而GPS还不能在静态条件下提供精确的高度信息,所以本文选用精度15 cm的MS5540C静压高度计来弥补GPS高程定位的不足。数字大气压力传感器MS5540C具有温度补偿校正功能,同时还具有体积小、重量轻、输出数据稳定、功耗低、响应快等优点。该控制器的接口电路比较简单,连接系统时钟至外设32.768 KHz,利用UART接口与飞行控制计算机进行实时通信。
1.2执行机构驱动模块
无刷型直流电机具有周期长、效率高等特点,它与无刷电机共同应用于执行机构的控制系统中。引擎是飞机姿态控制的重要动力来源,无刷式直流电机的工作原理是通过气动使转子转速变化来改变飞行姿态。以PWM波形为控制信号对无刷直流电机进行控制,由DSP发出的PWM信号具有不同的占空比,根据这些信号,电机也会产生不同的速度,从而造成不同的飞行姿态,满足飞行需求。
1.3电源模块
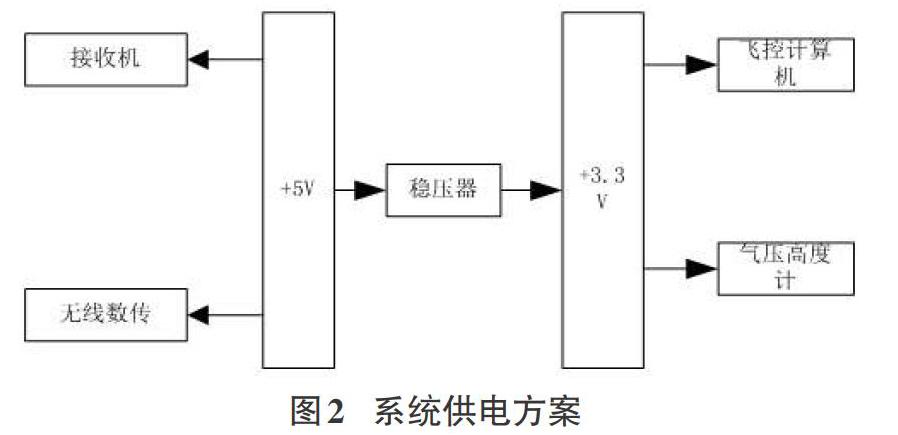
动态对整个系统至关重要,为确保系统的正常供电,首先要对系统的功率需求进行分析,然后根据最大输入电流等参数,选择合适的调功器进行电路设计。选压指标:输入5 v,输出3.3 v,最大输出电流300毫安以上。最后选定的调压器最大输出电流为500毫安。
系统供电方案如图2所示。
系统供电方案设计中是通过发电机组将机械能转化为电能、干电池将化学能转变为电能的方法,由于发电机组和电池不充电,而这两个极子分别带正、负电荷,因此只需加个电压来使它们产生电压。当电池组的两极与导体相连时,正电荷和负电荷通过放电产生电流,充完电后,电流(压力)就没有了。干电池就是所谓的电源,把交流电源通过变压器和整流器转换为直流电源的装置叫作整流电源,能够发出信号的电子装置叫作信号源,三极管能对前面发出的信号进行放大,然后将放大后的信号传送到后面的电路中给系统供电。
2软件功能设计
在主控软件设计中,采用GPS数据读取、遥控数据接收、主回路控制频率等,提高了软件系统功能,像高度计这样的部件就减少了CPU的工作负荷,无须CPU干预就能实现地面数据的输出和采集。
根据深度学习的原理对无人机控制系统软件进行局部设计,深层次的学习需要分析的原理是:将图像划分成2000-3000年的候选区域,CNN提取每个区域的特征,然后通过支持向量机训练分类器对这些特征进行分类和排序,并根据意识到的边界框回归算法对最终目标框进行迁移。在克服了传统方法的缺点之后,CNN仍没有很好的运行效率,因为每个候选区的整个网络需要重新计算。利益区域策略把候选区域映射到CNN模型特征层。针对R-CNN提取卷积特征的冗余操作,如果不想重复地输入来自不同区域的图像,则需要直接匹配所有提取的相应区域的深度特征。
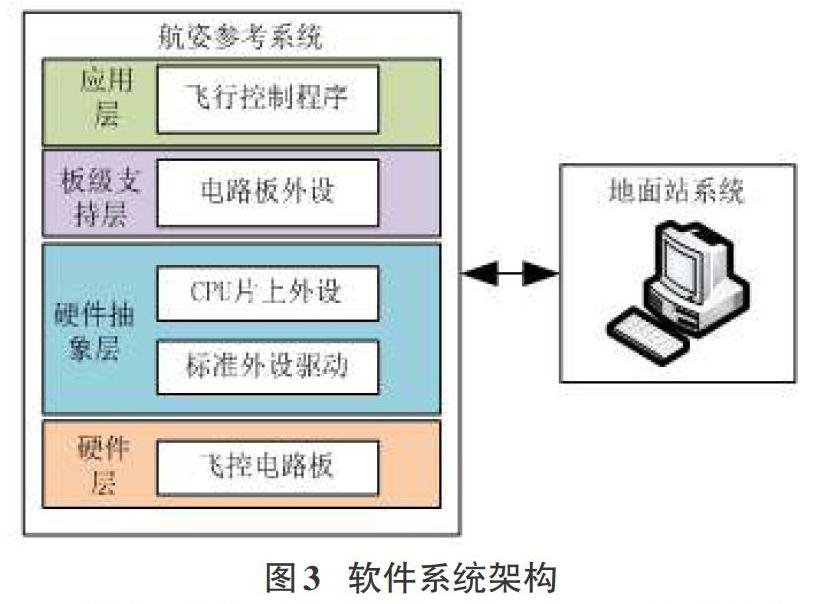
在整个无人机系统中,软件系统也是其重要组成部分,各种任务调度和复杂算法的实现都需要软件系统的支持。若以硬件系统为主体,则以软件系统为灵魂,构成了整个无人机系统。该软件系统主要由底层硬件驱动程序、硬件抽象层程序、板级支持程序和应用程序三部分组成,还包括层与子系统的接口、协议定义和格式等,设计的功能软件具有良好的通用性、可移植性和可读性。
软件系统架构如图3所示。
无人机执行指令的过程就是对飞行姿态的有效控制,主要包括俯仰、横摇和倾斜的飞行姿态。不同的任务可以在执行命令时同时实现不同的姿态,如能进行上述检测,则整个系统进入另一种状态,也就是等待指令的状态。相反,如果无人机没有接收到任何与上述指令相关的指令,那么软件将分析并计算相应指令来准备下一条新的指令。
3结束语
随着无人机技术和产业的快速发展,在军事、民用、工业、农业和服务行业等各领域得到了广泛的应用,无人机受到了国内外的高度重视。科技人员通过对无人机控制系统的设计问题进行了深入的研究与分析,并结合无人机的非线性、强耦合、欠驱动等特点,设计了一套基于深度学习技术的智能无人机控制系统,实现了智能程度高、适应恶劣环境能力强、任务完成效率高的优点。由于无人机无人驾驶系统较为复杂,涉及综合理论、建模和控制技术等各个方面,目前在无人机系统设计方面还处于初步探索阶段,难免会存在许多问题。因此,在未来系统设计中应不断加强研究创新工作,以提高无人机的应用水平,其中主要包括以下几个方面:
(1)在系统建模和实际测试中发现系统存在辨识问题,当四台电机驱动时与响应上存在不一致性,输出指令的响应与实际有一定的差异,应进行补充与改进。
(2)智能无人机离不开一个地面站,因此必须加强对地面站的设计和发展。
