基于单目视觉的AGV间防撞系统设计
2020-07-04陈俊廷刘翔翟岳仙陆玮
陈俊廷 刘翔 翟岳仙 陆玮
摘要:为了解决智慧工厂中AGV行进过程中面对其他车辆无法自动躲避的问题,本文设计了一种基于单目视觉测距的AGV防撞系统。该系统在AGV顶部安装摄像头,用于采集AGV行驶过程中的前方图像,车体内安装微处理器对图像进行分析,并将分析结果转换为控制信号控制AGV,从而达到防撞的目的,其中图像分析首先采用三帧差分法将图像中的AGV目标检测出来,然后基于逆投影变换测距原理计算出AGV间的距离。实验结果表明,该系统在模拟实验环境下测量精度基本控制在10%以内, 4 m内最大绝对误差为51 mm,能够满足物流工厂AGV的设计要求。
关键词: 单目视觉; AGV; 三帧差分法
【Abstract】 In order to solve the problem that AGV can't avoid other vehicles automatically in the process of moving in intelligent factory, this paper designs an AGV anti-collision system based on monocular vision ranging. The system installs a camera on the top of AGV to collect the front image of AGV during driving. A microprocessor is installed in the car body to analyze the image, and the analysis results are converted into control signals to control the AGV, so as to achieve the purpose of anti-collision. In the image analysis, the AGV target in the image is detected by three frame difference method, and then the distance measurement is calculated based on the principle of back projection transformation distance from AGV. The experimental results show that the measurement accuracy of the system is basically controlled within 10% and the maximum absolute error within 4 m is 51 mm, which can meet the design requirements of AGV in logistics factory.
【Key words】 monocular vision; AGV; three-frame differencing
0 引 言
自动引导车(AGV)是一种配备有自动导引系统的物料搬运设备[1],可以保证系统无需人工驾驶即可沿着预定路线自动行驶,实现了物料装卸的全过程自动化。近年来,AGV由于其灵活性好、自动化程度高和智能水平高的优势而得到了飞速发展[2]。目前,已广泛用于存储、制造、邮局、烟草、港口和码头、危险场所和特殊行业。
时下,AGV的最高行进速度一般不超过2 m/s,在生产中,为了保证AGV间不发生碰撞,AGV的安全功能非常重要[3-4]。AGV安全装置包括障碍物接近检测装置和障碍物接触缓冲装置。接近检测装置的距离测量方法包括红外距离测量、超声波距离测量[5-6]和激光距离测量。随着计算机视觉技术的发展,视觉测距方法由于其低成本和低测量误差而得到了普及与使用。
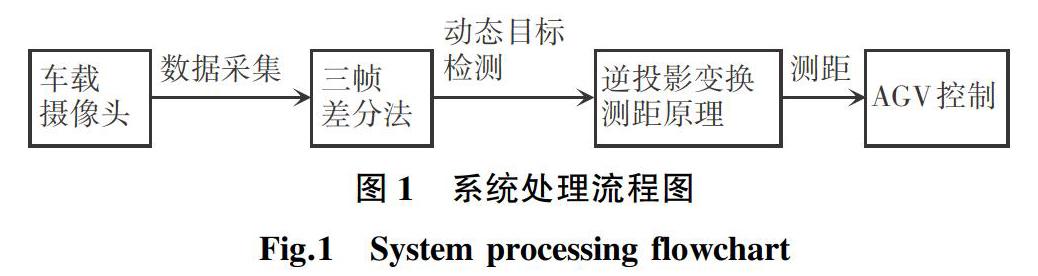
本文研究了适用于AGV防碰撞的单目视觉测距系统。该系统采用图像处理技术[7],在满足測程的要求下,取得了较好的测量精度。AGV可根据摄像头采集到的视频数据分析AGV本身与其它AGV间的距离,并启动相关的输出,如停止机器,或发出警告信号,实现AGV的安全防撞保护。系统处理流程图如图1所示。
1 硬件系统设计
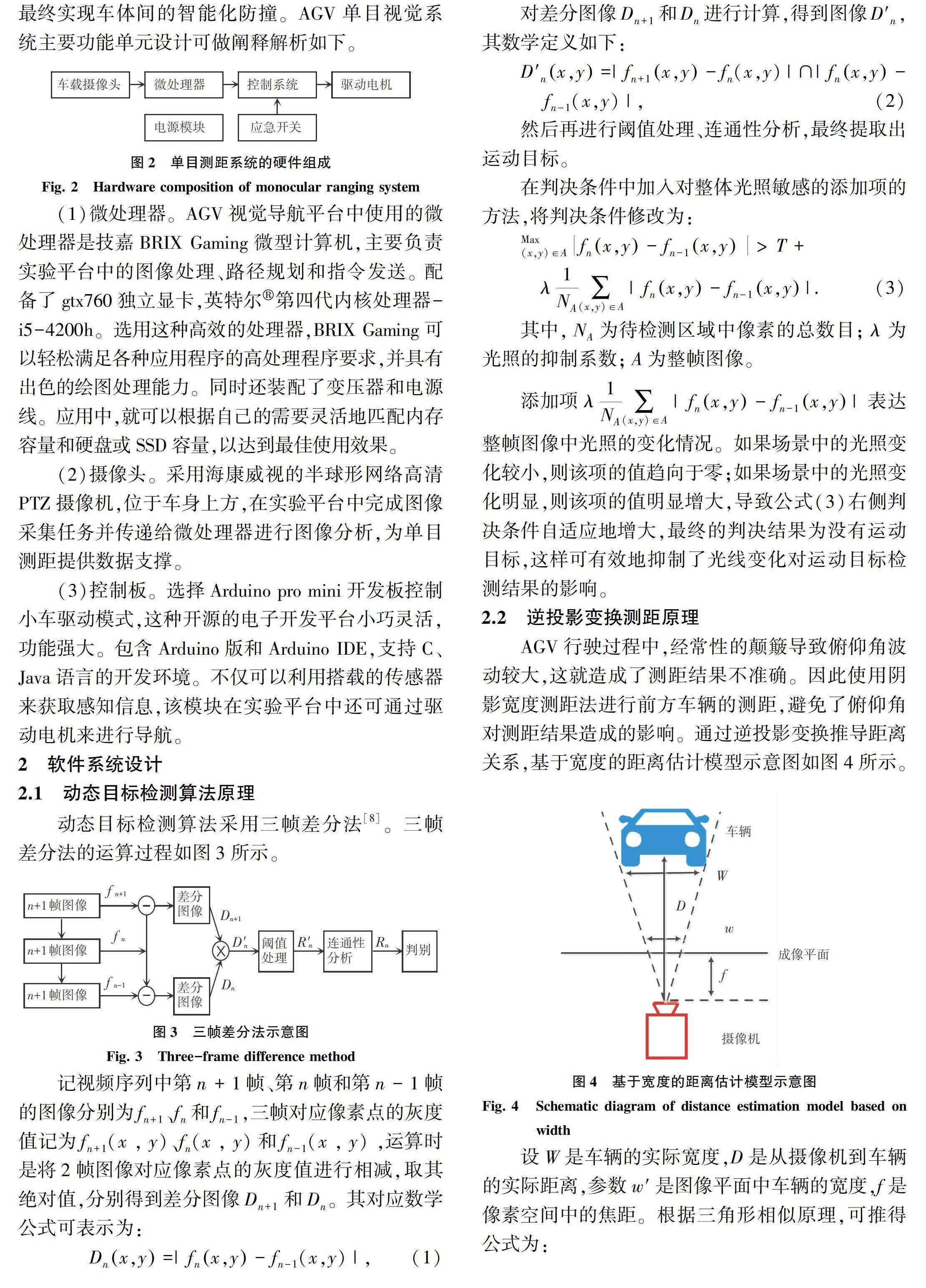
单目视觉防撞系统主要由AGV车体、微处理器、驱动器、摄像头、电源等部分组成。单目测距系统的硬件组成如图2所示。
整体思路为:AGV车体顶部安装车载摄像头作为数据采集器,获取前方车辆的图像信息;微处理器在设计上安装在车体内,用于搭载软件系统,并对采集到图像数据进行分析;控制系统主要采用Arduino来对AGV进行控制,电源模块则为整个系统供能,最终实现车体间的智能化防撞。AGV单目视觉系统主要功能单元设计可做阐释解析如下。
(1)微处理器。AGV视觉导航平台中使用的微处理器是技嘉BRIX Gaming微型计算机,主要负责实验平台中的图像处理、路径规划和指令发送。 配备了gtx760独立显卡,英特尔第四代内核处理器-i5-4200h。[JP2]选用这种高效的处理器,BRIX Gaming可以轻松满足各种应用程序的高处理程序要求,并具有出色的绘图处理能力。同时还装配了变压器和电源线。应用中,就可以根据自己的需要灵活地匹配内存容量和硬盘或SSD容量,以达到最佳使用效果。
(2)摄像头。采用海康威视的半球形网络高清PTZ摄像机,位于车身上方,在实验平台中完成图像采集任务并传递给微处理器进行图像分析,为单目测距提供数据支撑。
(3)控制板。选择Arduino pro mini开发板控制小车驱动模式,这种开源的电子开发平台小巧灵活,功能强大。包含Arduino版和Arduino IDE,支持C、Java语言的开发环境。不仅可以利用搭载的传感器来获取感知信息,该模块在实验平台中还可通过驱动电机来进行导航。
2 软件系统设计
2.1 动态目标检测算法原理
动态目标检测算法采用三帧差分法[8]。三帧差分法的运算过程如图3所示。
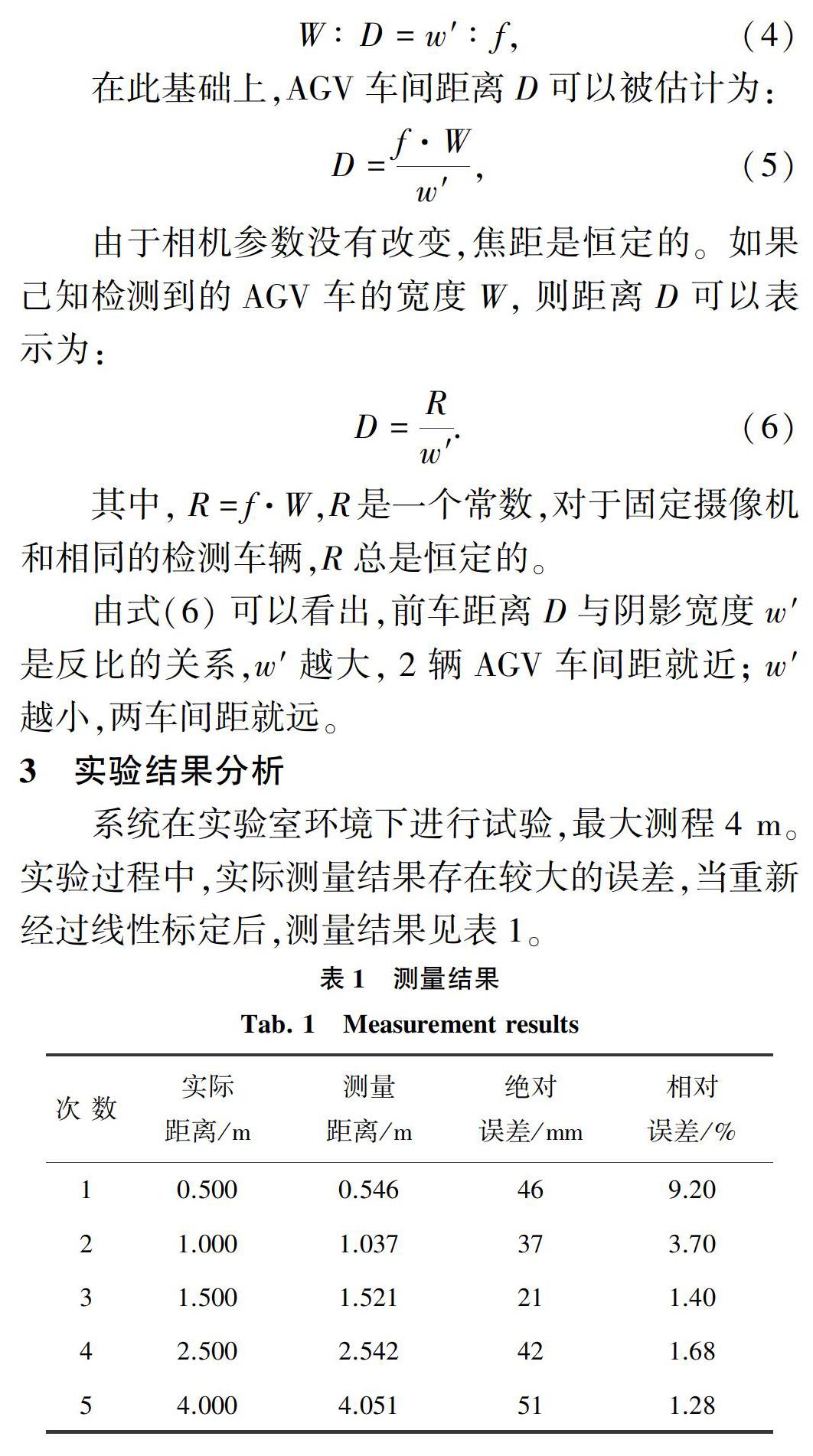
结果表明,测量精度基本控制在10%以内,4 m内最大绝对误差为51 mm,基本满足设计的要求。
4 结束语
本文设计了一种基于单目视觉测距的AGV安全防撞系统,该系统通过采用计算机视觉技术分析AGV车顶安装的摄像头采集到的视频图像,求得了AGV车间的距离,初步设计出了适用于AGV 的单目视觉防撞系统,实验室试验表明该系统在 4 m范围内,测量精度为51 mm,基本满足AGV 的防撞要求,为实际工业应用提供了低成本、高可靠性的解决方案。进一步的研究工作包括提高系统的测量精度和可靠性,增加不同环境下的测试实验等。
参考文献
[1] 武启平, 金亚萍, 任平,等. 自动导引车(AGV)关键技术现状及其发展趋势[J]. 制造业自动化, 2013(10):106.
[2]罗金玲. 基于计算机视觉的前方车辆检测与测距系统设计[J]. 电脑编程技巧与维护, 2017(22):87.
[3]陈庆文, 董莘. 智慧工厂AGV调度与避障的研究[J]. 自动化技术与应用, 2017,36(12):118.
[4]黄诚杰. 智能AGV系统设计及路径规划算法研究[D]. 福州:福建农林大学,2016.
[5]王强, 王高亮. 一种新型超声波测距仪的设计与研究[J]. 智能计算机与应用, 2017,7(5):146.
[6]王亚君, 刘赫, 吕实诚. 具有实时语音播报的超声波测距仪[J]. 电脑学习, 2008(4):19.
[7]王震,巩秀钢,冯韶文,等. 基于图像识别的立定跳远自动测距系统设计[J]. 智能计算机与应用, 2018, 8(5):63.
[8]赵建. 基于三帧差法的运动目标检测方法研究[D]. 西安:西安电子科技大学, 2013.
