一种小型纯电动越野赛车操纵稳定性仿真分析
2020-07-04邓均成
王 竞 雷 雄 邓均成
(四川工程职业技术学院,四川 德阳618000)
小型越野赛车要在岩石、沙丘、原木、陡坡、泥泞等崎岖地形和越野条件下安全行驶,因此对其操纵稳定性有很高的要求。良好的操纵稳定性充分体现了赛车的运动表现,保障赛车在动态项目中取得好成绩。在设计阶段运用多体动力学软件ADAMS 对赛车整车操纵稳定性进行仿真分析,从而获得赛车操纵稳定性能的相关影响因素,有效指导赛车设计的进一步优化与改进。
1 赛车整车模型建立
赛车是一个非常复杂的系统,建模时要忽略和简化对测量目标值影响不大的零部件,通过确定各关键零部件的连接点位置、施加各部件之间的约束副、建立各系统之间的连接端口、编辑弹性衬套、减震器、悬架弹簧等部件的特性曲线来搭建各个子系统模型。赛车整车可简化为前后悬架系统、动力系统、车身系统、轮胎系统、转向系统、制动系统7 个子系统。因形体对仿真结果没有影响,所以将车身系统简化成一个包含车身所有质量特性参数的球体,将动力系统系统简化成一个包含其所有质量特性参数的质点。

图1 赛车整车虚拟样机
将各子系统在ADAMS/Car 软件模块中联结形成整车虚拟样机,如图1 所示。整车模型组装过程中需要反复调试与修改,首先应对悬架系统进行调试,再对整车装配模型进行直线行驶、转弯行驶、加速行驶、制动行驶仿真的调试完善后,即可进行仿真分析。
2 赛车操纵稳定性仿真分析
本文以国家标准GB/T6323.6-1994 和汽车行业标准QC/T 480-1999 为参照,对赛车整车模型进行稳态回转试验和转向盘转角阶跃输入试验仿真,并对操纵稳定性进行分析。
2.1 稳态回转试验仿真分析。按照国标要求,运用已建立的整车虚拟样机仿真模型,先给方向盘一个转角,使它在转弯半径为15米的圆周行驶状态中缓慢加速,待侧向加速度值达到6.5m/s2停止仿真。输出转弯半径比R/R0、前后轴侧偏角差值α1-α2、车身侧倾角Φ 及稳定性因数K 随侧向加速度ay的变化曲线如图2-5 所示。
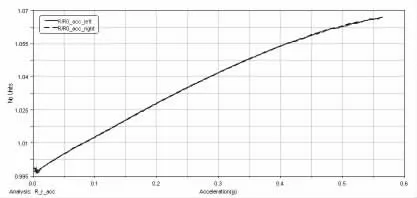
图2 R/R0随ay 的变化曲线

图3 α1-α2随ay 的变化曲线
图4 Φ 随ay 的变化曲线

图5 稳定性因数K 随ay 的变化曲线
从图2 和图3 可以看出,当侧向加速度大于0.4g 以后,因轮胎侧偏特性已进入非线性区域,R/R0、α1-α2与侧向加速度不再是线性关系;稳定性因素K 偏小,导致不足转向量偏小。根据稳定性因数的计算公式:
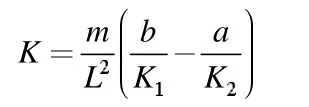
其中,a、b 为质心到前后轴的距离,K1、K2为前后轮胎的侧倾高度。因此,增大前轴荷分配比例,可以增大赛车的不足转向度;增大后轴荷的分配比例,将会减小赛车的不足转向度。要减小轴荷转移的影响,可以采用断面较宽的轮胎,提高轮胎的侧偏刚度,从而提高赛车的操纵稳定性。
2.2 转向盘角阶跃输入试验仿真分析。参照国标要求,给赛车输入转角阶跃,稳态侧向加速度从1m/s2开始,每隔0.5m/s2进行一次试验,直至达到3m/s2;让赛车以试验车速直线行驶,消除转向盘自由行程并记录各测量变量的零线,0.2-0.5s 后快速转动转向盘,达到预选位置时固定数秒,待所测变量过渡到新稳态值后停止记录。仿真结果如图6、图7 所示。

图6 左转侧向加速度(纵坐标单位g)
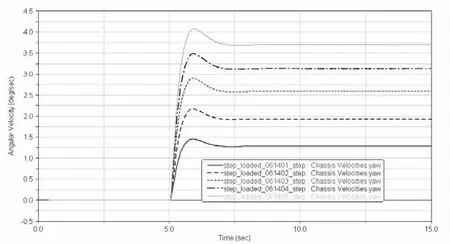
图7 左转横摆角速度
由以上图线可以看出,车速不变时,随着转向盘转角的增大,侧向加速度稳态值及横摆角速度稳态值增大。但是根据评分标准计算出赛车的瞬态转向特性评分值较低,赛车响应时间偏长,会使驾驶员感觉转向迟钝。因此,可通过采用具有更大侧偏刚度的后轮轮胎、适当减小赛车的整车转动惯量来减小响应时间值。
3 结论
3.1 稳态回转试验仿真结果显示,赛车的不足转向量偏小,可通过采用断面较宽的轮胎、提高轮胎的侧偏刚度来改进。
3.2 转向盘角阶跃输入试验仿真结果显示,赛车的瞬态转向特性评分值较低,可通过提高后轮的侧偏刚度、减小整车转动惯量来改进。
