基于复合控制的车载充电机谐波抑制策略
2020-07-02于会群林豪洋
于会群, 林豪洋, 王 雷, 沈 昱
(1.上海电力大学, 上海 200090; 2.上海外高桥第三发电有限责任公司, 上海 200137)
近些年来,温室气体的大量排放所导致的全球气候变化问题引发了人们的强烈关注,各国均在积极寻求低碳解决途径[1-3]。中国的交通运输行业碳排量逐年增加,年平均增长率为9.05%,尤其是1996年之后,由于经济的飞速发展,年平均增长率更是达到了10.11%[4],因此必须要采取积极的措施来应对这一问题。电动汽车作为清洁、绿色、低污染排放的新型交通工具逐渐引起了人们的关注[5]。目前,电动汽车充电机主要分为车载充电机和地面充电机两大类:车载充电机一般体积较小,装载于电动汽车内部,由单相220 V交流电供电,但充电功率较低,一般为8 kW以下;地面充电机一般体积较大,装配于专门的充电站中,由三相交流电供电,其充电功率较高,通常为10~100 kW[6]。
电动汽车充电机为非线性负载,工作时由于大功率开关管的高频率通断会产生大量谐波电流与高频噪声[7],对电力系统的电能质量和电磁环境造成严重影响[8]。由于电能计量装置是根据50 Hz的标准正弦波设计出来的,因此谐波也会影响电能计费系统的正常运行[9]。
目前针对车载充电机谐波抑制的研究还较少。文献[10]为了减小三相充电机的体积与质量,提出了一种四开关、两引脚有源滤波器来滤除三相充电机的谐波,将三相电路中的第三相与LC滤波相结合连接于有源滤波电路的负极,使电流总畸变率控制在3.3%左右。文献[11]通过在车载充电机前级采用Boost型有源功率因数校正电路,搭建了一台4 kW的车载充电机样机,其谐波电流低于4.5%,但没有涉及其可靠性和安全性的研究。文献[12]通过搭建3种不同的充电机仿真模型,包括三相不可控充电机、十二脉整流充电机以及脉冲宽度调制(Pulse Width Modulation,PWM)整流充电机,研究了充电站谐波抑制策略,通过分析得出有源滤波器(Active Power Filter,APF)补偿装置和PWM整流对于充电站的谐波抑制较为合适。但有源滤波器控制复杂且需要额外硬件,而PWM整流适用场合广泛,能够在不添加任何硬件的情况下,实现能量的双向流动。
本文首先分析了车载充电机结构及单相PWM整流器的基本原理。因为电流内环PI控制器的频域模型只包括常数模型和阶跃信号模型,所以抑制非线性干扰的效果有限,且无法做到无静差跟踪高频信号。然后根据内模原理,为提高PWM整流器中电流内环对指令信号的跟踪能力,在内环控制系统中引入一个重复控制器。最后,通过搭建单相PWM整流充电机模型,以验证所提出的复合控制策略的可行性与正确性。
1 车载充电机结构
完整车载充电机结构如图1所示。
整个系统由整流电路、输入滤波、DC/DC功率变换器及输出滤波构成。车载充电机的电源由单相AC220 V提供,经过不可控整流电路以及输入滤波至高频变压器,由DC/DC变换器输出直流,最后经过输出滤波电路为电动汽车蓄电池充电[13-14]。

图1 车载充电机结构
在研究电动汽车充电机谐波治理策略时,主要使用等效模型法[15]对高频DC/DC变换器及其之后的电路进行等效建模,如图2所示。
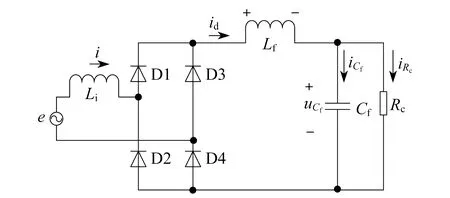
图2 车载充电机等效模型
图2中:e为电网输入电压,通常是220 V;Li为输入滤波电感,Lf为输出滤波电感;Cf为滤波电容;Rc为等效电阻。采用等效电阻可以大大简化电路,等效电阻Rc的大小为
(1)
式中:UB,U0——DC/DC功率变换器两端电压和输出电压;
I1,I0——DC/DC功率变换器电流和输出电流;
P1,P0——图1中高频变换器的输入功率和输出功率;
η——充电机效率,通常为90%以上。
等效电阻会随着充电机工作时间的增加而发生变化。
2 车载充电机谐波抑制策略分析
2.1 具有谐波抑制能力的车载充电机模型分析
将图2中4个不可控二极管用可控功率管代替。具有谐波抑制能力的车载充电机结构如图3所示。图3中,L为输入滤波电感,C为直流稳压电容,i为交流侧电流,Udc为直流侧电压。
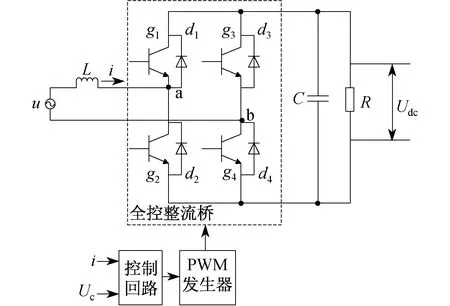
图3 具有谐波抑制能力的车载充电机结构
设整流器开关函数SA和SB分别为
(2)
图3中a和b两点间的电压为交流侧电压uab,其表达式为
(3)
则可得
uab=(SA-SB)Udc
(4)
进一步可得整流电路状态方程为
(5)
由式(5)中的数学模型可以得出输入电流i与直流电压Udc的变化趋势。根据式(5)可以采取适当的控制方法对i与Udc进行控制,从而获得理想的控制效果。
2.2 PWM整流控制策略设计
PWM整流器通常采用双闭环控制方式,含有电压外环和电流内环,如图4所示。
整个系统的控制策略如图5所示。

图4 PWM整流控制结构
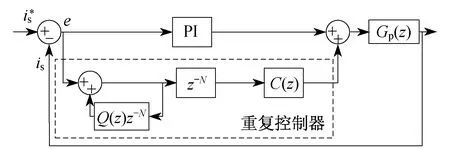
图5 复合控制结构
图5中,z-N为周期延时模块,将系统的采样频率设置为10 kHz,那么N=10 kHz/50 Hz=200,即z-200。Q(z)为滤波器,可以有效抑制周期性干扰。为了简化系统,Q(z)可以取接近1的一个常数。C(z)为补偿环节,其主要功能是对系统的控制量进行校正,进而为系统提供幅值与相位的补偿。其主要结构有3部分,包括重复控制器增益kr,相位补偿环节zk,重复控制补偿器S(z),即C(z)=krzkS(z)(其中,kr用于协调系统稳定性与响应速度之间的关系,zk用于补偿系统在低频段的滞后现象)。
S(z)环节的作用是将不需要的高频信号截断,其设计直接影响整个重复控制系统的性能。根据被控对象的特性,结合控制器的特点,S(z)在设计时主要考虑两点:一是对被控对象的中低频增益进行调节并对高频进行有效的衰减;二是提升整个系统的抗干扰性和稳定性。
本文中S(z)由二阶滤波器S1(z)与陷波器S2(z)组成,其中二阶滤波器S1(z)的参数设计为
(6)
二阶滤波器S1(z)的参数设计既要保证中低频段具有一定的增益,又可以有效减少高频段的谐波干扰,提升系统的稳定性。
针对陷波器的设计,可采用零相移陷波器对S2(z)进行设计,其一般表达式为
D(z)=
(7)
本文中,取m=2,a2=1,a1=1,a0=2,则S2(z)的表达式为
(8)
取kr为0.95,k为2,则补偿环节为
C(z)=0.95z2S1(z)S2(z)
(9)
根据图5,重复控制环节的传递函数为
(10)
同时,在传统PI控制时
(11)
在PI控制与重复控制相结合的情况下
(12)
从式(11)和式(12)可以看出,引入重复控制后,e的增益明显下降,使得系统对于电流的跟踪能力得到显著提升。
3 仿真验证
根据上文分析的车载充电机拓扑结构以及PWM整流控制策略,将PWM整流技术应用于车载充电机中,以达到谐波治理的目的。
3.1 车载充电机谐波分析
在MATLAB/Simulink仿真软件中搭建如图2所示的车载充电机等效模型,对车载充电机的谐波进行分析。系统相关的仿真参数如表1所示。
表1 系统仿真参数
当车载充电机工作时,在没有滤波措施的情况下,其电网侧电流波形及其频谱如图6所示。由图6可知,电流波形畸变严重,电流总畸变率达到54.80%,且谐波阶次集中于奇数项,此时会对电网运行造成严重影响。

图6 车载充电机电流波形及频谱
3.2 复合控制下车载充电机谐波分析
在车载充电机的基础上,将PI控制与重复控制相结合,应用于谐波治理中。根据图5设计系统的谐波控制策略,其仿真参数如表2所示。

表2 PWM整流充电机仿真参数
PI控制下单台车载充电机电流波形及其频谱如图7所示。由图7可以看出,车载充电机交流侧电流波形得到明显改善,电流总畸变率为3.63%。
在PI控制的基础上加入重复控制进行车载充电机谐波抑制,电路参数以及PI参数保持不变。同时为了有较好的波形质量,滤波器Q(z)取常数为0.95。
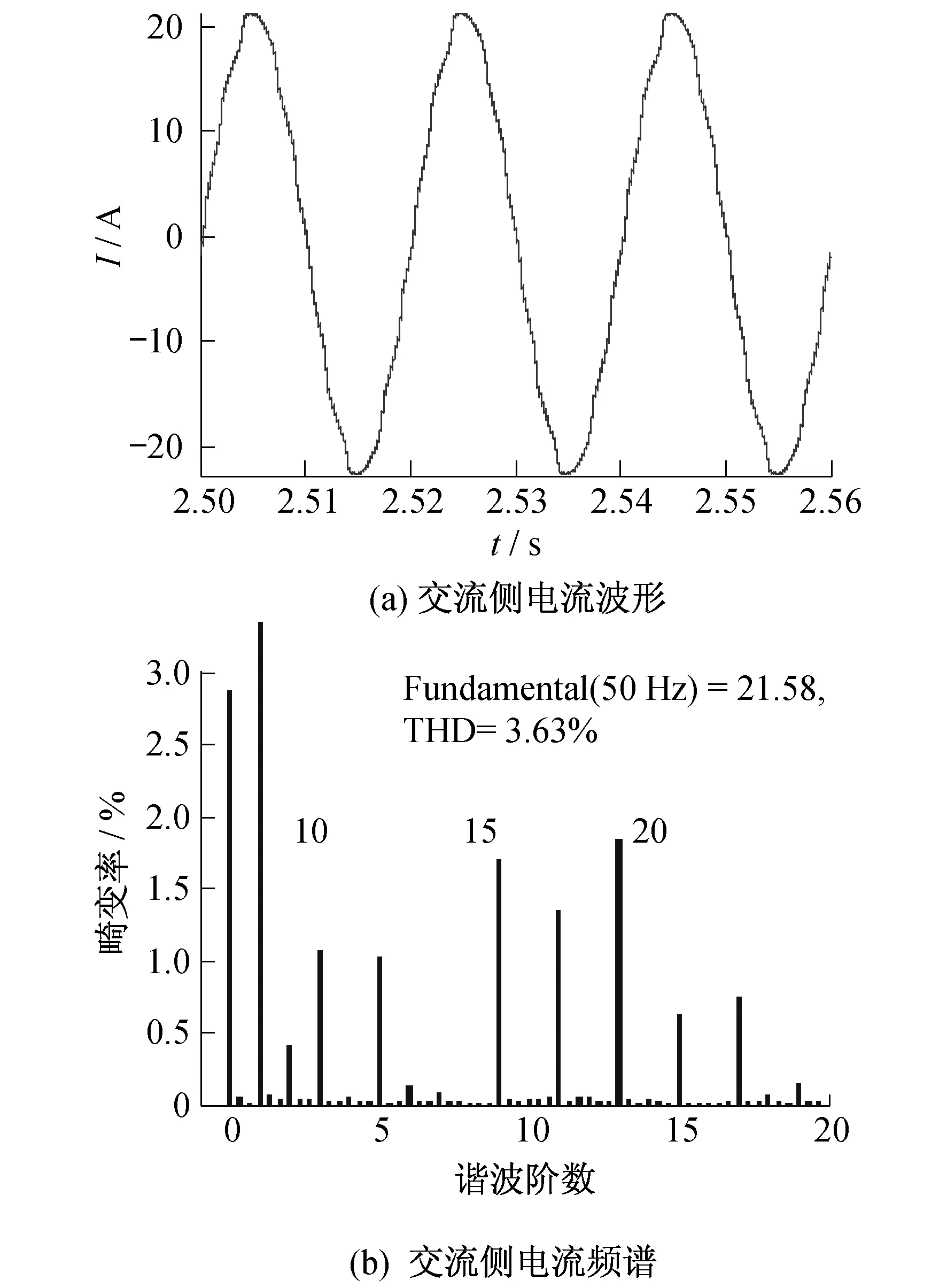
图7 PI控制下单台车载充电机电流波形及其频谱
在PI控制与重复控制的共同作用下,车载充电机工作时交流侧电流波形及其频谱如图8所示。
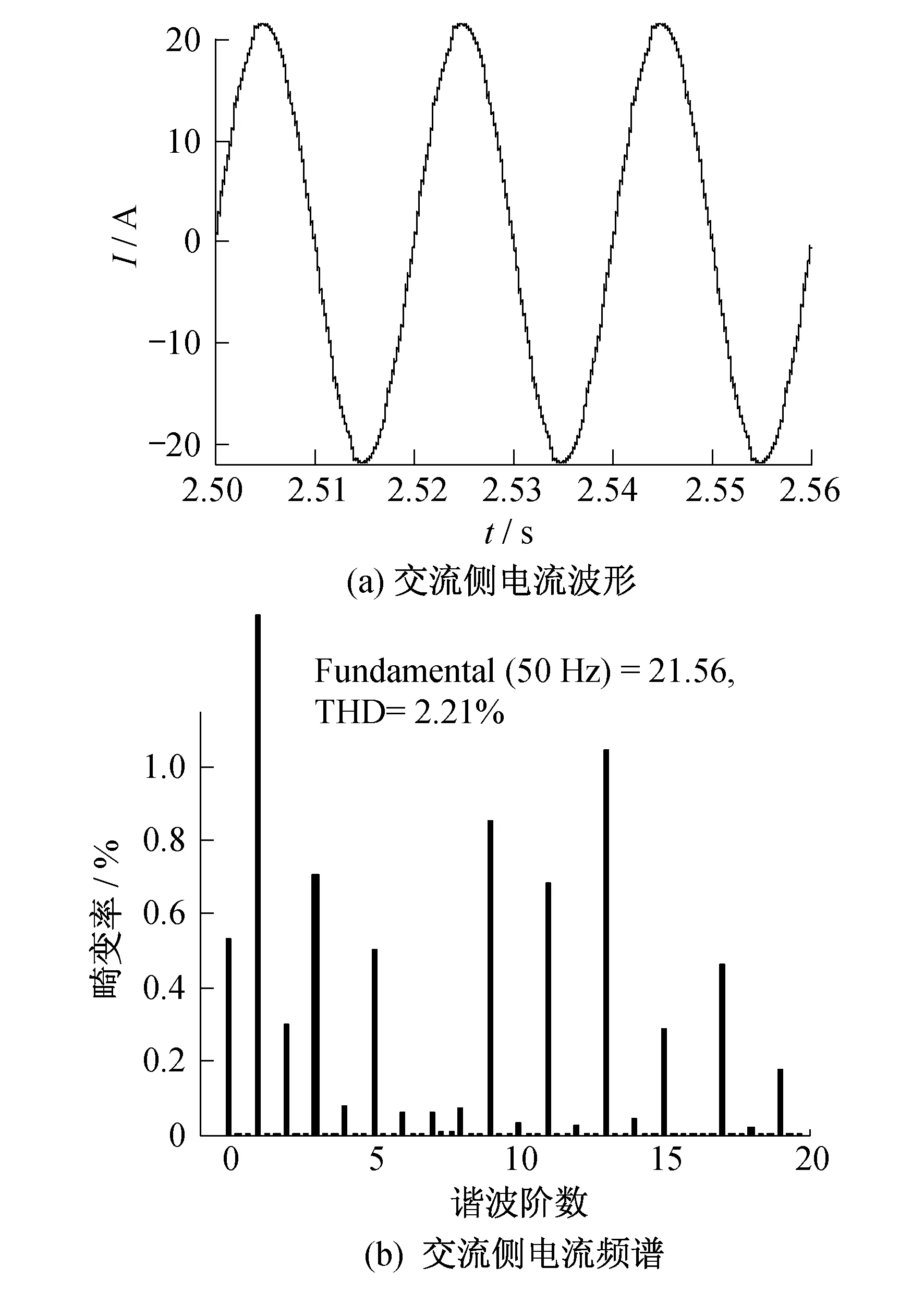
图8 PI控制与重复控制共同作用下单台车载充电机电流波形及其频谱
由图8可以看出,PWM整流充电机交流侧电流波形得到了进一步改善,电流总畸变率也明显降低,为2.21%。
3.3 多台车载充电机谐波分析
当多台车载充电机同时工作时,由于各台车载充电机接入的时间有所不同,就会造成在同一时间点的输出功率也会不同。这些影响因素会使各阶次谐波电流的幅值与相位角发生变化,最终出现谐波相互抵消的现象,使得交流侧电流谐波含量减少。
当5台车载充电机同时工作时,其电网侧电流波形及其频谱如图9所示。由图9可知,发生谐波相削现象,电流波形畸变有所改善,电流总畸变率下降了26.20%,但谐波阶次依旧集中于奇数项。
当5台充电机都采用PWM整流技术,且仅有PI控制时,其电网侧电流波形及其频谱如图10所示。由图10可知,其电流总畸变率为3.19%。
当采用PI控制与重复控制相结合的复合控制时,其电网侧电流波形及其频谱如图11所示。由图11可知,其电流总畸变率为1.97%。
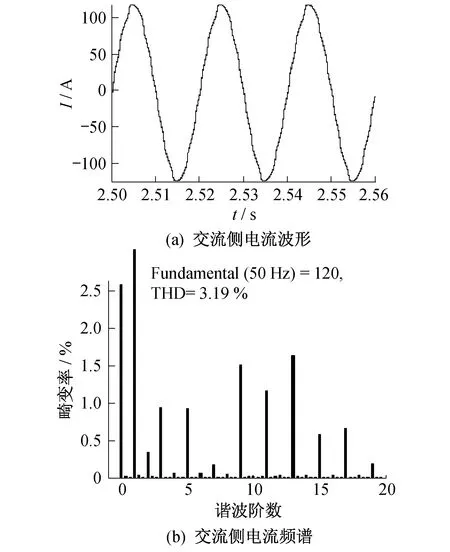
图10 PI控制下5台车载充电机电流波形及其频谱
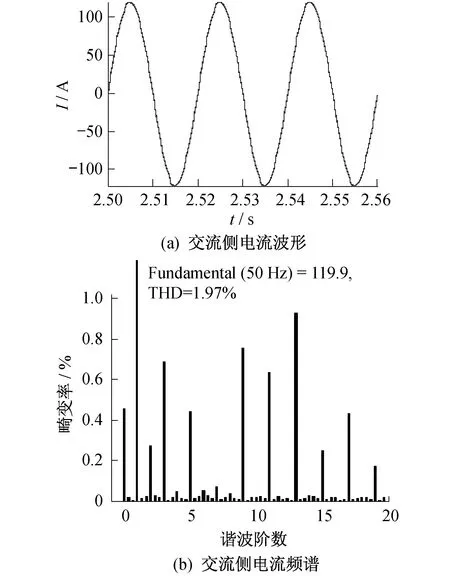
图11 复合控制下5台车载充电机电流波形及其频谱
4 结 论
本文分析了车载充电机拓扑结构及PWM整流器工作原理,将PWM整流器应用于车载充电机,针对PWM整流控制策略,提出了一种基于PI控制加重复的PWM整流复合控制策略,通过理论分析与仿真验证,得到如下结论:
(1) PWM整流充电机本身具有较强的谐波抑制能力,当多台充电机同时工作时,会出现谐波相互抵消的现象,使得交流侧电流谐波含量减少;
(2) 所提出的PI控制+重复PWM整流控制策略能够进一步改善车载充电机交流侧电流波形以及总畸变率。