某地区GPR数据处理中多次波压制流程简述
2020-07-01陶国志李瑶瑶白宇姚钰
陶国志 李瑶瑶 白宇 姚钰

摘 要:探地雷达数据处理的目的是对原始雷达记录进行初步数据处理,对原始雷达记录进行初步加工处理,本文以某实际数据为例,注重简述基本GPR数据处理流程中的多次波压制步骤。
关键词:数据处理与解释;GPR
探地雷达数据处理的目的是对原始雷达记录进行初步加工处理,压制噪音、干扰,在探地雷达图像剖面上显示反射波,提取反射波的各种有用参数。本文以某实际数据为例,简述基本GPR数据处理流程。本例中数据用reflexw处理软件处理数据处理。将数据进行增益处理,可通过增益处理放大深部信号。在Processing-Gain,如图(5-17)
选择engery decay,在scaling value中输入增益的幅值。常用的增益处理还可选择manual gain(y),进行手动增益。參数设置如图(1)所示,设置完成后点击start可得结果如图(2)
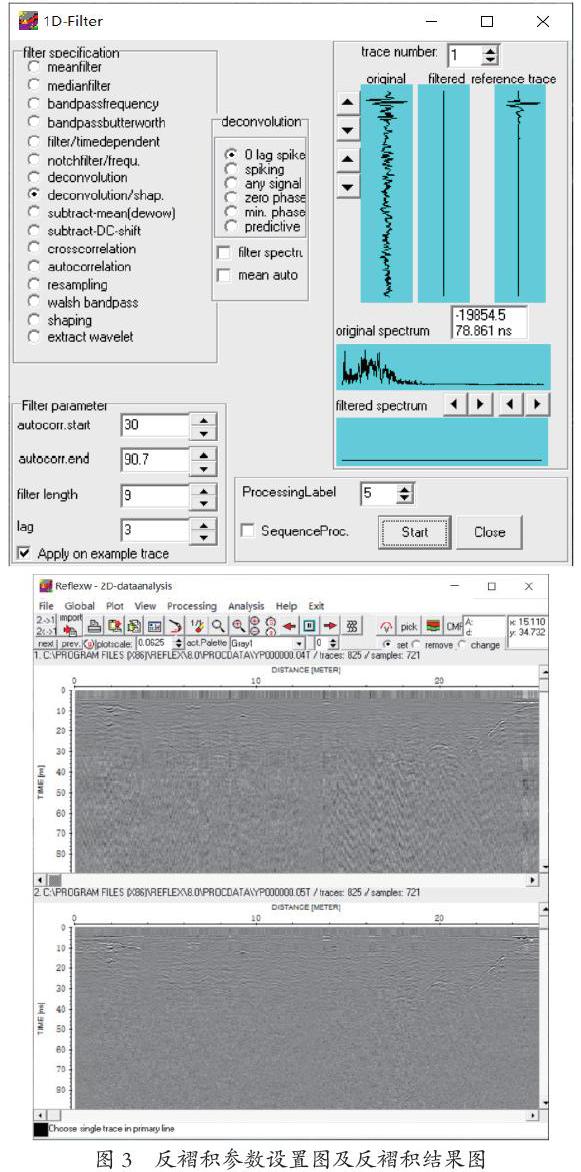
现在对数据进行反褶积处理,点击Processing→1D-Filter,进入设置窗口。选择deconvolution/ship,该滤波分别作用于每一道,该滤波允许对剖面应用反褶积,这就是所谓的毛刺反褶积,即它可以创立较高的带宽和较平滑的谱(根据毛刺的谱)。反褶积需要四个参数(自相关范围的开始和结束,滤波道长度,白噪声百分比)。用自相关范围开始的指标(autocorr.start)和结束的指标(autocorr.end),可以控制反褶积效果。当需要对深部信号进行反褶积时,自相关范围必须取大的时间范围,而小数值范围仅在需要将原始信号转换成一个脉冲时有效。点击start进行反褶积处理,下面是反褶积后的数据图(3)。然后点击左上的2—>1进行切换,将这步的输出数据转为下一步的输入数据,如图3右图所示。
本文由大学生创新训练项目(探地雷达信号噪声分类、识别及压制方法研究)支持。
(吉林建筑大学测绘与勘查工程学院,吉林 长春 130118)
