月球轨道器交会对接九自由度半物理仿真系统设计及验证
2020-07-01唐宁
唐 宁
北京控制工程研究所,北京100190
0 引言
月球轨道器的空间交会对接是一个非常复杂的过程,涉及控制方案复杂、新研设备多、精度指标要求高等技术难点[1]。为了验证交会对接的可行性,需在地面进行大量的试验验证,九自由度半物理仿真试验就是其中最为有效的一种方式。美国、日本和欧空局等国家组建了多种半物理仿真系统,其中较为典型的有美国兰利研究中心负责设计和研制的双子星座飞船光学对接仿真系统,日本筑波空间中心建立的交会对接GNC系统靠拢段半物理仿真系统,欧空局和德国宇航院在德国航空航天试验院空间运行中心组建的九自由度接近操作仿真器[1]。为了确保交会对接任务的顺利实施,我国自行研制了一套月球轨道的九自由度半物理仿真试验系统,用于RVD敏感器部件级的性能验证和自控交会对接技术的仿真验证。
1 半物理仿真系统的总体设计
GNC分系统九自由度半物理仿真试验系统应用运动模拟器模拟两飞行器的相对运动(包括相对位置和相对姿态),将飞行器上与GNC系统有关的真实部件接入试验回路,由实时仿真计算机完成交会对接过程中两个飞行器共9个自由度的动力学和运动学计算,并实时控制运动模拟器等设备,半物理仿真系统由试验控制系统对试验过程进行管理和监控,完成试验所需要的遥控模拟、遥测模拟、推进系统的模拟等,同时对试验数据进行采集、处理、存储和仿真结果的可视化,完成仿真试验。
1.1 半物理仿真系统组成
半物理仿真系统由九自由度运动模拟系统、仿真计算机、光端机和试验控制系统组成。
九自由度运动模拟系统由一个固定的三轴转台和一个能做三维平动的三轴转台2部分组成。九自由度运动模拟系统能模拟两飞行器在一段距离内的相对位置和相对姿态运动。
仿真计算机由高性能工作站组成。仿真计算机接收推进模拟器的推力数据,计算两飞行器的轨道和姿态信息,转换成转台的控制信息,实时控制九自由度运动模拟器,同时向敏感器模拟器发送激励数据。在试验过程中,仿真机和试验控制系统中的数据服务器之间通过实时反射内存交换数据。数据库服务器将接收到的试验控制指令转发给仿真机,同时通过反射内存接收仿真机生成的计算数据,存储到数据库。
试验控制系统采用的是前台、后台结构,前台系统主要采用CPCI系统实现,建立外系统模拟等效子系统,实时采集数据,反馈状态和发送指令给GNC系统;对于实时要求性高,反应时间短的等效器,采用自行开发的通用智能接口子系统实现。前台系统的通用CPCI模块和定制板卡安装在同一个控制机箱内,通过调理接口箱与GNC系统相连,同时将采集的数据传递到后台的数据库服务器,并且接收后台控制指令计算机传来的试验控制指令。
后台系统主要实时显示测试数据,对数据的正确性进行检查,自动生成测试报告、管理数据等。后台是大大提高测试系统自动化程度的关键。
在整个测试系统中,后台不与被测对象直接连接,被测对象的数据主要是通过前台的外系统等效器进行采集,通过网络发送给后台的服务器。后台主要用于设置工作模式,建立测试序列,控制测试过程的进行;记录各种事件,存储与转发测试数据;查询、检索、回放测试数据;实时显示测试数据,判读测试数据的正确性并提供故障诊断和报警;在测试完成后自动生成测试报告等功能。
后台采用网络化结构,硬件主要由通用计算机、服务器等组成,包括试验控制显示子系统、数据服务器和指令控制台,由软件实现系统测试的自动化。
2 关键技术分析
为了实现两飞行器交会对接的测试功能,模拟太空环境下不同初始条件下的对接情况,九自由度半物理仿真地面测试系统需具备以下几个关键技术,包括:实时模拟技术,试验项目的自动切换技术,信息链的多路数据传输技术,九自由度转台的控制技术和基于光纤网络的长线传输技术。
2.1 实时模拟技术
利用九自由度运动模拟器,太阳模拟器真实模拟飞行器的飞行环境。在飞行控制系统半物理仿真试验中,通过接入交会对接敏感器、控制计算机和其他对象,获得最大限度下的模拟真实情况下两飞行器交会对接的运动数据,通过增加各类环境扰动和不同的对接初始条件,近似模拟实际的近距离交会对接过程。
2.2 试验项目的自动切换技术
交会对接九自由度半物理仿真试验系统可以进行RVD敏感器性能验证试验和自控交会对接试验,不同的试验项目中参试的设备不同,敏感器数据采集的方式也不同,各参试设备间的电缆连线数量和走向也不相同,为了最大限度实现试验的自动化,需要对各个测试项目的设备连线进行全面整理,在隔离调理箱中做好各个测试项目的电缆连线切换方案。在控制指令计算机上选择试验方案,隔离调理箱将根据选择的试验项目,切换正确的电缆连线,从而减少人工干预,实现测试项目切换过程的自动化。
2.3 信息链的多路数据传输技术
试验系统内数据通讯基本上分为2种形式:1)器上部件(如控制计算机、交会对接敏感器等)之间及控制计算机和各模拟器的通讯,这些完全按照实际情况实时进行;2)仿真设备之间数据通讯,这部分内容又分为2种:一种对实时性要求不高,应用了高速以太网完成数据通讯,如数据服务器给数据显示站提供数据,遥测模拟器得到遥测数据送给服务器等;另一种对实时性要求高,应用反射内存高速实时网完成通讯,如仿真计算机分别和九自由度运动模拟器,仿真计算机分别和执行机构模拟器、敏感器模拟器通讯。
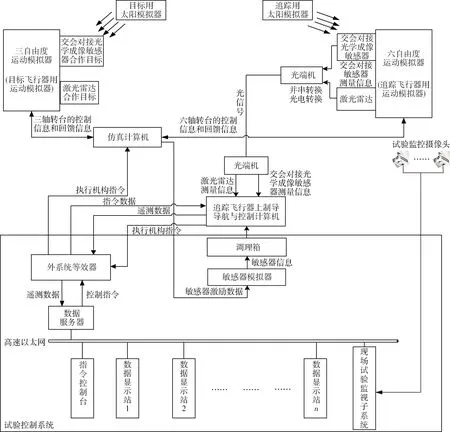
图1 九自由度仿真系统组成结构图
2.4 转台控制技术
依据两飞行器轨道和姿态动力学的解算数据,计算目标转台和追踪转台各自的绝对控制量,控制两转台的运动,实时模拟两飞行器在轨近距离交会的过程,转台控制的具体设计如下:
通过标定数据可以得到目标航天器动力学坐标系与六轴转台控制坐标系之间的方向余弦阵C1和位置关系A1,通过动力学计算可以得到目标航天器动力学坐标系与追踪航天器动力学坐标系之间的方向余弦阵C2和位置关系A2,考虑到在最后的逼近阶段,两飞行器之间只有较小的姿态偏差,假设目标器不动,由此可以得到:
(1)
A20=A1+C1A2
(2)
由式(1)和(2)可得到六轴转台的6个绝对控制量。
2.5 基于光纤网络的长线传输技术
交会对接敏感器等设备安装在转台之上,与CPCI设备大概有100m左右的距离,所以调理箱要通过一些必要的设备才能够传输如此远的距离。为了实现这个功能,设计了一种基于光纤网络的长线传输方案,采用光端机将采集到的电信号耦合到光纤上实现远距离传输(以下简称光纤网络的长线传输方案)。
光纤网络的长线传输方案的基本原理是将转台上的各类设备的电信号和地面上行的各种电信号先通过光电转换将电信号耦合到光纤上,再在对应端用另一台光端机进行光电转换,变换为电信号,接入到调理箱或控制器。
九自由度试验需要长线传输的信号主要包括RS-422的差分信号和集电极开路形式的遥控指令信号。光纤网络的长线传输方案的技术关键是串/并转换造成时间延时的问题。因为天上产品传输过来的信号是并行的,光纤传输要求信号必须是串行输入的,所以必须要做并/串转换。
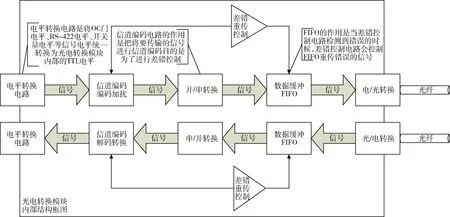
图2 光电转换结构框图
需要转换的并行信号大概有以下特征:每根信号线的速率不超过500Kbit/s;每根信号线出现信号的时间是随机的并且可能以很快的速度连续出现,也可能是间隔很长时间才能出现一次。光端机是模块化的结构,每个模块将32路电信号耦合到一根光纤上。假如每一个时钟周期进行一次并/串转换,32路信号的第1路和第32路信号之间就相差32个时钟周期,假如时钟是以1GHz的振荡周期运行的话第1路信号与第32路信号之间时间上相差32ns。而TTL允许的最小延时是126ns。这与32ns相距甚远,所以完全符合时序要求。
另外从通信原理的角度来讲,每一路信号最高的数据速率为500Kbit/s,32路为一个单位,所以线路上需要传输的数据速率是500Kbit/s×32=1.6M/s,而时钟周期是1GHz,所以光纤传输的数据量也是1Gbit/s,显而易见光纤的数据容量远远大于实际的数据容量,所以通过提高传输速率的办法完全可以解决并/串转换造成的时间延迟问题。
综上所述采用光纤网络的长线传输方案优点很明显:1)多模光纤传输的距离可以达到多模光纤传输的距离可以达到2km,长距离传输问题就迎刃而解了。2)每路光纤可以传输多路信号,所以转台上的设备与地面上的设备之间的连线就可以少很多,重量大大减轻,布线难度也大大降低。采用光电转换和调理电路一体化的设计,安装更简洁方便,可维护性更强。3)因为所有设备产生的信号都是通过光电转换才进入到地面安装的设备上去的,所以使用了光电隔离方法,保证实验设备出故障的时候,故障不会大面积扩散。
3 仿真验证
为实现我国月球轨道的交会对接,根据月球轨道交会对接任务的特点,设计了月球轨道交会对接方案,研制了新型的交会对接光学成像敏感器。为了验证方案的正确性,考核交会对接光学成像敏感器的性能,依据本文设计思路构建了月球轨道的九自由度半物理仿真系统,进行了相关的仿真验证,图3~6为一组典型的月球轨道近距离交会对接的仿真结果。
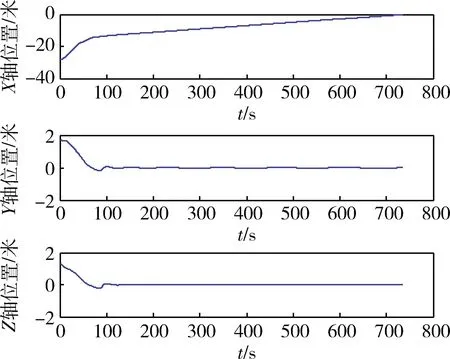
图3 相对位置曲线
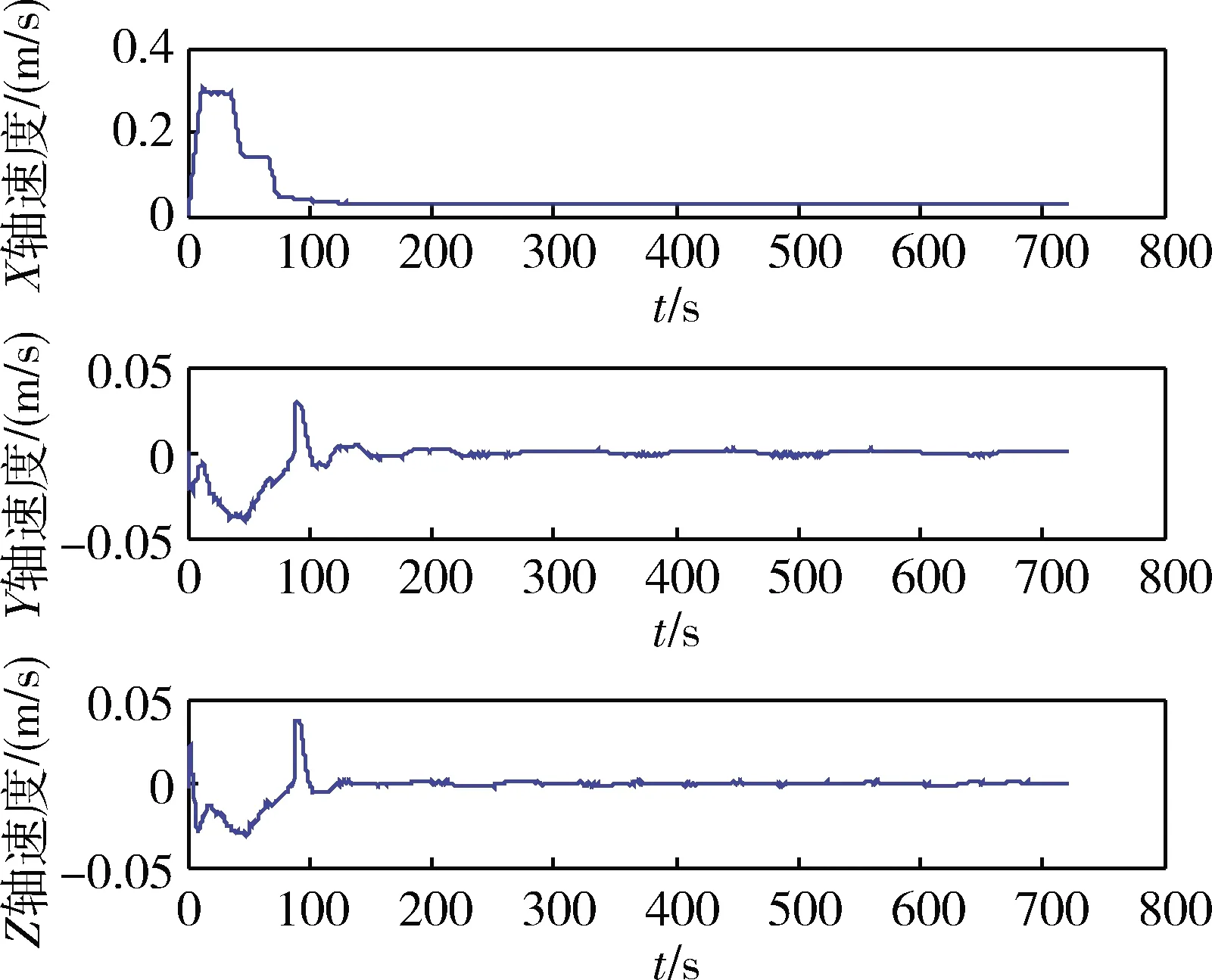
图4 相对速度曲线
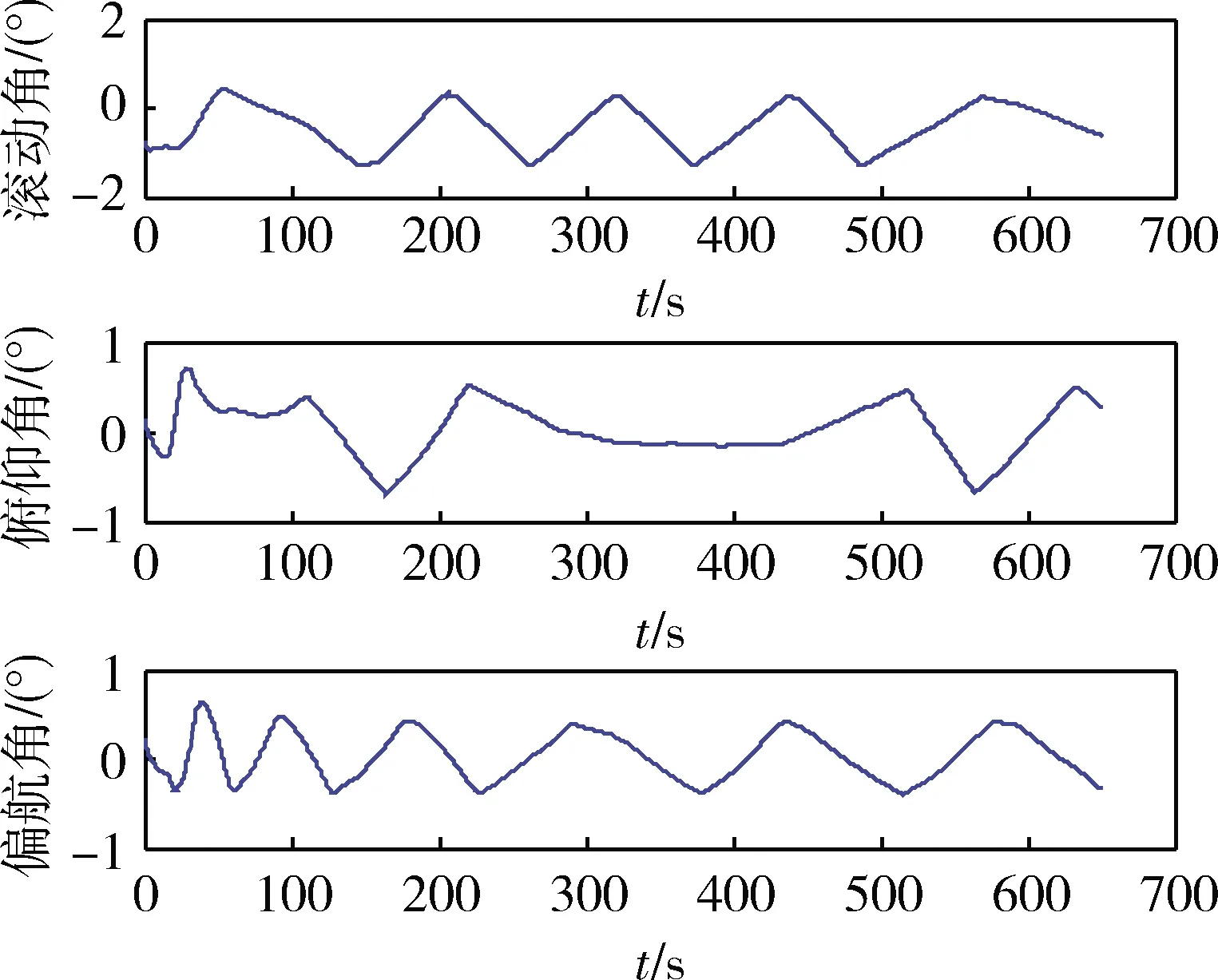
图5 相对姿态角曲线
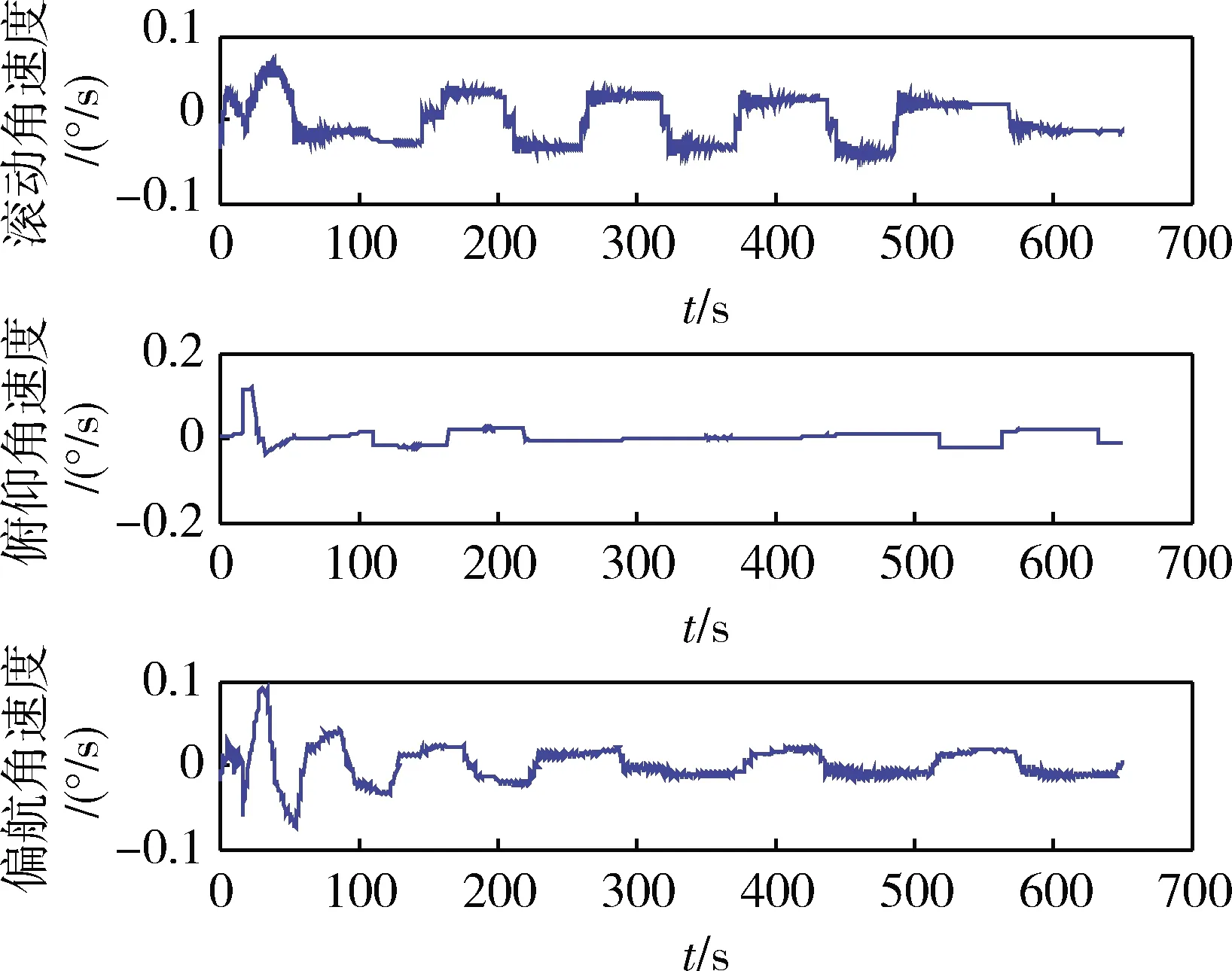
图6 相对姿态角速度曲线
4 结论
空间交会对接技术是航天领域发展的必备技术,利用九自由度半物理仿真系统,使用先进的测试技术和设备,较为真实地模拟近距离交会对接的全过程,是验证交会对接敏感器性能和交会对接控制算法和策略最为有效的方式。
本文提出了一种基于千兆光纤以太网络的测试系统设计方法,在月球轨道器的交会对接控制分系统的仿真验证中得到了实际应用,达到了很好的效果,从其关键技术的分析和实现中可以看出,具有一定的先进性和广阔的应用前景。
