无人机影像匹配点云技术在引哈济党调水工程中的应用
2020-07-01路创军
路创军
(甘肃省水利水电勘测设计研究院有限责任公司,甘肃 兰州 730000)
无人机测绘是无人机遥感的一种特殊用途,主要通过无人机对目标区域进行航空摄影,然后利用地面处理系统对数据进行处理,最终制作出目标区域的正摄影像图、数字地形图以及三维地物模型。随着科学技术的进步,无人机技术已经有了较大的发展。在现代测绘中,无人机测绘颠覆了传统测绘的作业方式,尤其在大比例尺测图方面。无人机发展初期,LIDAR技术的发展使得大比例尺测图出现新的发展趋势,但是由于生产设备昂贵、操作复杂、数据冗余等原因使得此方法没有得到迅速推广。新的匹配算子(SIFT、Mesh)与平差算法(RANSAC、L-M、C-G、SFM)的出现,使得自动化无人机软件得以普及,常规软件如Pix4d Mapper、PhotoScan、INPHO、Smart3D等可以基于影像数据匹配生成点云数据。本文研究对无人机匹配的点云数据进行抽稀、去噪、分类等,自动生成DLG数据。通过与实测检查点的数据对比,得出精度分析数据。高程与平面精度均满足国家规范要求,此方法可以提高工作效率,节约生产成本。
1 无人机影像匹配点云技术
无人机测绘目标是通过无人机获取目标区域影像进而获取目标区域的三维地理信息模型。三维地形通常通过大量地面点空间坐标和地形属性数据来描述[1]。密集匹配是通过摄影测量基本原理中同名点前方交汇得到地面点坐标的思想,在空中三角测量结果的基础上,通过各种匹配算法获得测区密集点云的一种方法,其特点是可以生成密度非常高的地面点[2]。常用的影像匹配方法有两种:①基于像方灰度的匹配算法,如相关系数法、相关函数法、协方差函数法、差平方和法、差绝对值和法、最小二乘影像匹配法;②基于特征匹配的算法,如金字塔多级影像匹配算法、SIFT算法等。无人机摄影测量技术软硬件设备发展迅速,使得影像获取更为便捷,计算机视觉重建技术的进步,提高了无人机影像匹配点云技术的质量和精度。无人机影像数据预处理后通过密集匹配得出的三维点云,数据集保留了目标场景的纹理与色彩信息,但无人机点云不含有LIDAR点云数据所包含的强度、回波等信息。如何从无人机点云数据中分离出地面点与非地面点,是重点的研究对象。
2 工程实例
2.1 工程概况
引哈济党调水工程是将苏干湖水系的大哈尔腾河河水调至党河流域,主要解决敦煌月牙泉及西湖国家自然保护区的生态用水和阿克塞县城生活生产用水。工程主要包括取水枢纽、输水管道、输水隧洞、梯形明渠、暗涵等输水建筑物。设计最大引水流量12.0m3/s,年调水量为1.0亿m3,调水期为4—9月。
该工程可行性研究阶段需要对线路沿线进行1∶2000大比例尺带状地形图测绘工作,面积约800km2,范围如图1所示。

图1 引哈济党测图范围
引哈济党调水工程行政区划位于酒泉市敦煌、阿克塞和肃北三县(市),其中调水区位于阿克塞县境内的建设乡全部以及团结乡的大部分,收水点为阿克塞县调蓄池及党河水库。测区属于戈壁丘陵地形,线路经过的党金山海拔约3500m,整个测区高差达到1000m以上。测区气象条件复杂,工期紧张,因此采用CW- 20无人机进行作业。
2.2 实施方案
本次航测数据采集使用CW- 20无人机航空摄影测量系统进行作业,搭载NIKON- D810系列数码单反相机。整个测区划分为16个架次,设计测区相对航高940m,航向重叠度为80%,旁向重叠度为65%,影像分辨率为0.15m,分区进行处理。
3 数据预处理
PhotoScan是一款基于影像自动生成高质量三维模型的优秀软件。它无须设置初始值,无须相机检校,根据最新的多视图三维重建技术,可对任意照片进行处理,无需控制点,通过控制点可以生成真实坐标的三维模型。利用CW- 20无人机航空摄影测量系统获取的影像经过软件处理,生成点云、DOM、DEM。如图2—3所示,生成的测区数字产品色彩鲜艳、纹理清楚。

图2 DOM数据

图3 DEM数据
4 匹配点云数据处理
由于镜头畸变、相片质量、匹配误差等因素的影响,无人机影像匹配的点云数据存在大量的噪点、边界模糊区域、水面漏洞等。点云的处理、滤波关系到最终产品的精度高低。
4.1 点云粗差的处理
点云处理采用TerraSolid软件进行,它的主要模块是基于Microstation开发的插件系统,运行于Microstation系统之上,其中主要包括:TerraMatch、TerraScan、TerraModeler、TerraPhoto等模块。TerraSolid软件系列能够快速载入点云数据。其中的TerraScan模块用来处理数以千万计的点云数据。从生成的点云数据高程角度分析,粗差点高程大致分为两种。一种为明显高于或低于目标区域地物高程点的点云异常点,另一种为局部地区异于临近地物点的点云异常点。在载入无人机点云数据后,通过设置不同的参数,分出低于地面的点和孤立点,剔除这些明显的粗差点,如图4所示。在此基础上,分出关键模型点,通过计算,此时的点云数据已经没有明显的粗差点,可以进行分类地面点的工作。
4.2 点云数据分类与信息提取
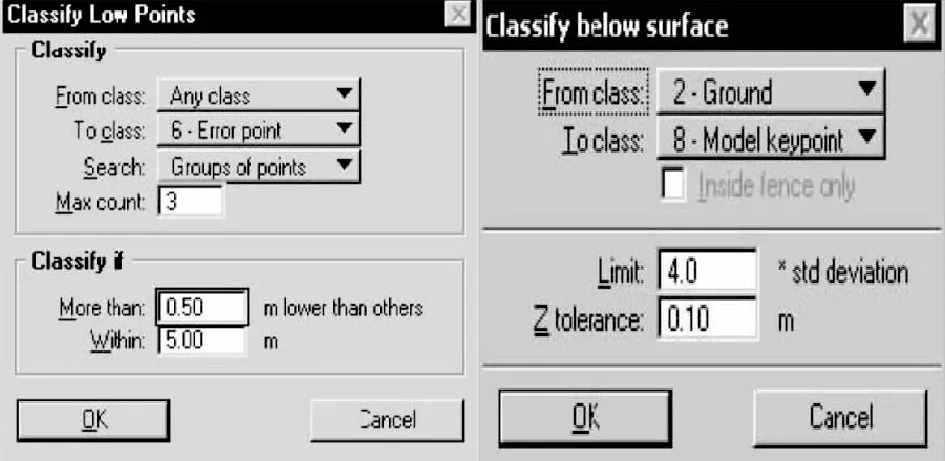
图4 粗差点分类参数
利用TerraScan模块中的地面点分类功能进行数据分类与信息提取,可通过设置参数,先进行建筑物、道路等硬表面点的提取与分类,如图5所示,利用植被指数功能进行植被的滤波提取,最后分离出地面点,并对分类后的地面点进行平滑处理,如图6所示。对于因为参数设置残留未分类的点,采用人工干预分类方式分类。最后利用清华山维EPS与CASS软件进行DLG数据的生产加工,最终产生1∶2000比例尺DLG数据,如图7所示。

图5 地面点分类参数
5 精度分析
判读成图精度是否满足国家规范要求,是验证成图方法的必要环节[3]。为了验证数据精度,需要计算生产数据与实测检查点的平面与高程中误差。

图6 点云地物滤波

图7 滤波后的点云与DLG
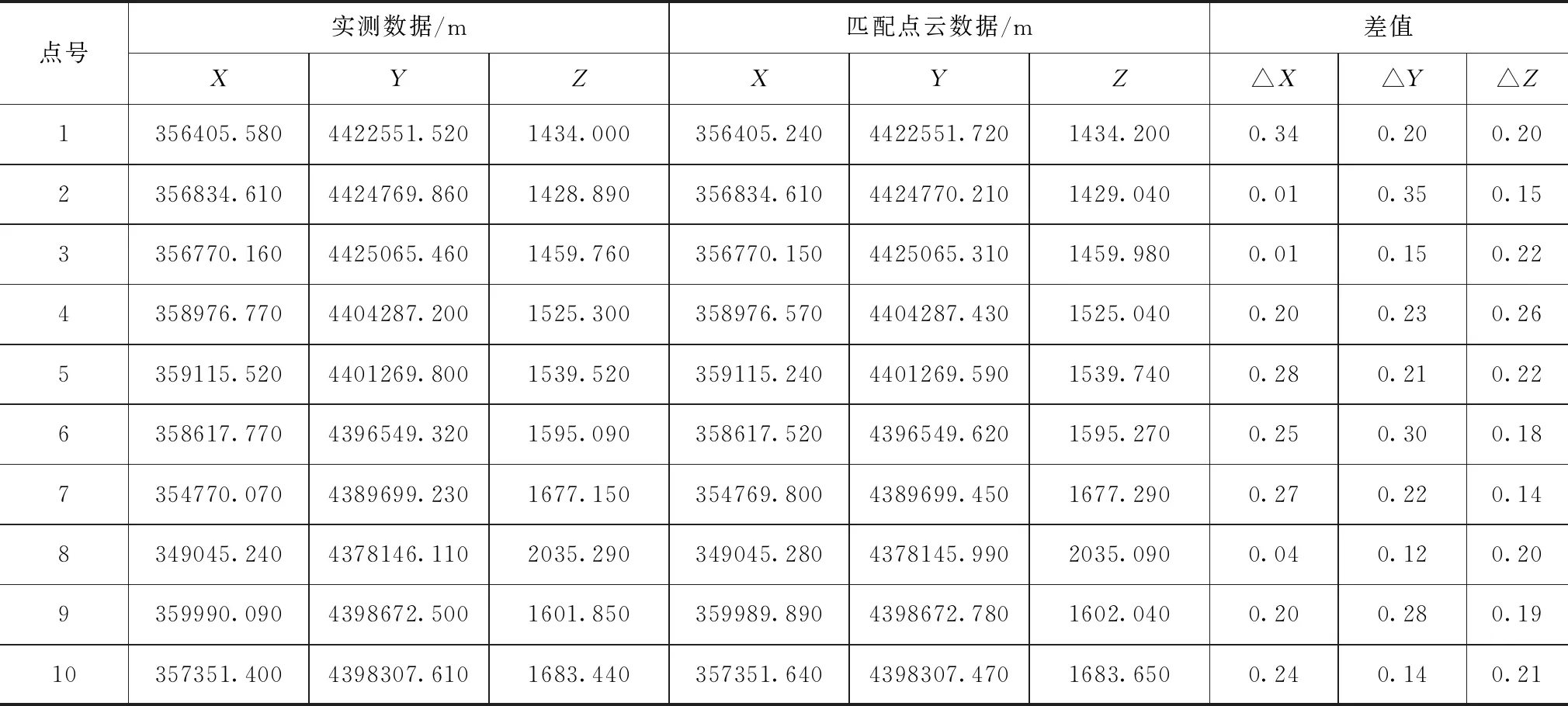
表1 部分检查点精度统计
式中,m—数据中误差;Δi—检查点的不符值;n—评定精度的点数。
检查点利用RTK实测采集,主要采集线路关键位置的地物与地貌点,均匀分布在每个区块中。经过统计计算,平面中误差为0.22m,高程中误差为0.32m。对比CH/Z 3003—2010《低空数字航空摄影测量内业规范》,生产精度满足规范要求。部分精度统计见表1。
6 结语
本文通过对无人机匹配点云数据特点的研究并结合LIDAR点云数据处理技术,对匹配点云数据进行处理分析,成功分类出目标区域的地面地物信息,并生产出符合国家规范要求的数字产品。作为一项新的航空摄影测量技术手段,随着软件、硬件的提升与数据处理技术的不断完善,无人机影像点云处理技术在水利水电、城市规划、土地调查、交通设计等工程项目中会起到更加积极的作用[4]。同时如何真正运用无人机点云处理技术准确分类出地面点信息,滤波各参数如何选择等问题,还有待于在不同项目中积累、探索和研究。