基于智能巡航机器人的淡水养殖管理系统
2020-06-30张京玲胡建业聂湛然吴惠翠曾丽敏陈可铄王天雷
张京玲 胡建业 聂湛然 吴惠翠 曾丽敏 陈可铄 王天雷


摘 要:为了将人工智能引入渔业,推动渔业大数据发展,本论文设计了一套基于智能巡航机器人的淡水养殖管理系统。本系统利用水上巡航机器人的自动巡航功能配合升降装置对不同深度、不同位置的水质进行检测,对养殖场内水体温度、DO(溶解氧)、pH、浊度等水质参数进行汇总分析生成三维水质分布图,对不达标的区域有针对性的进行水质调节。用户可通过利用PC用户端及手机软件对养殖场进行实时监控。本系统实现了对养殖场的智能调控和精细管理,保证水产品处于适宜状态,提高水产品质量和产量,使得淡水养殖业从传统人工型转为物联网的智能管理型,为养殖户带来更大的经济效益。
关键词:水上机器人 自动巡航 水质智能监控 淡水养殖管理
中图分类号:TP242 文獻标识码:A 文章编号:1674-098X(2020)03(b)-0120-03
当水体被污染源侵染,抑或遇到恶劣天气时,水体的各项参数均会有所变化,如水中溶氧、水温、pH值等,这些参数都会影响到水体生物的生长。而目前大多数的淡水养殖都是采用人工管理的方式,十分耗费大量的人力物力,且工作效率不高。另外,不能实时监控养殖渔场,及时调节养殖场水质,也可能给养殖户造成一定经济损失。党的十九大以来,我国农业农村部也提出了关于加快渔业信息化建设的建议,更加引起了人们对淡水养殖业问题的关注。所以人们设想通过建立智能淡水养殖管理系统解决这一现实问题。
本文提供了基于智能巡航机器人的淡水养殖管理系统,其可以测量不同位置的水质参数、对养殖场及时进行智能调控、实现用户远程控制。该系统充满人性化的设计及考虑,可以更好的让鱼塘养殖户体验到鱼塘管理智能化。
1 淡水养殖管理系统的功能设计及实现
基于智能巡航机器人的淡水养殖管理系统[1]由智能巡航机器人、基于UWB与GPS的联合定位系统、水质检测装置、水质调节设备、上位机、手机软件六部分组成。系统利用UWB定位技术和低成本GPS联合定位,通过基于模拟退火算法[2]和RNN模型的水上机器人路径规划的方式,用多个传感器定时监测淡水养殖场多个位置不同深度的水温、溶解氧、pH 值等水质参数,并把数据上存到云服务器,通过云服务器再发送到 PC 客户端建立水质参数分布图。用户在PC客户端设定好每个水质参数的阈值,系统根据采集的数据和设定的阈值进行对比,最后控制养殖场的设备进行水质的自动调节。
本控制系统总体框图如图1所示。
1.1 自动巡航功能
本系统基于UWB和GPS联合定位的定位系统采用了基于TDOA算法UWB定位技术与低成本GPS组合定位方法[3-4]。把基于TDOA的UWB定位技术测量出来的水上机器人的实时位移观测方程和 GPS定位技术的伪距观测方程按照伪距差分定位的方法使用扩展卡尔曼滤波算法进行数据融合[3]。最后把融合方程按照常规的方法进行差分定位得出精确地水上定位坐标。可以给智能巡航机器人提供精确的当前位置和目标位置信息。
智能巡航机器由stm32f103rct6单片机作为主控芯片,智能巡航机器人在船头和船尾分别安装一个uwb标签,根据定位系统对标签分别定位可以解析出智能巡航机器人的当前的姿态。本系统的巡航机器人采用双螺旋浆作为传动装置,通过mosc管驱动模块对电机进行驱动。并且采用光电编码器实时检测电机速度,进行pid算法进行校正进行补偿输出。巡航机器人的硬件模块图如图2所示。
1.2 水质采集功能
本系统采用步进电机带动滚筒式升降装置的方案进行水质采集。在升降装置的末端带有pH传感器、温度传感器、浊度传感器和溶解氧传感器可对水质参数进行采集。同时,在升降末端带有水深传感器,通过实时的把当前传感器所在的水深深度 ,实现检测不同水深的水质参数。采集完成后巡航机器人通过nb-iot上发到云服务器,在上位机和手机软件进行实时显示。水质检测流程图如图3所示。
2 软件系统设计
2.1 自动巡航程序设计
初始化阶段,智能巡航机器人从3个基站获取基站位置信息构建矩形地图,利用UWB与GPS组合定位,获取机器人在淡水养殖场的坐标位置。当没有任何指令下发的时候,智能巡航机器人会不断向服务器更新当前定位信息。然后通过鱼塘管理界面选定巡航控制区域,点击生成检测点按钮,便可自动生成检测点,点击自动巡航,机器人自动生成最短路径进行巡航。
当智能巡航机器人收到自动巡航指令和目的坐标后, 进入自动巡航模式通过建立坐标系解析当前巡航机器人本身与目的位置的偏角。通过pid算法进行控制输出,使其最大限度的保证以直线方式到目的位置。在往目的位置前进的过程中,每5Ms向服务器发送巡航机器人的当前坐标位置。当接近目的时候通过智能调控不断减速直到到达目的区域的速度为零。自动巡航流程图如图4所示。
2.2 水质调节程序设计
上位机汇总各个不同节点的水质参数,构建基于三维差值算法的三维水质分布图[5]。根据三维水质分布图,分区域的自动开启水质调节设备。
水质参数分布图的三维插值算法流程为:获取水质参数的信息矩阵,分别提取前三维坐标信息和水质信息,随后对三维坐标调用TriScatteredInterp函数,计算出函数插值出来的Z维度数值,然后调用ndgrid(内插值)函数插值出三维坐标轴的剩余离散点。在完成以上步骤之后再对水质信息调用TriScatteredInterp函数插值出其他的水体空间的水质值,随即调用绘图函数画出水质分布三维图,并根据水质信息着色。
当三维立体图中有一部分区域的水质参数值达不到设定的阈值,系统控制设备进行水质调整,直到达到阈值范围。例如,当检测到某个区域的溶解氧正常值时,通过对缺氧区域定位信息的判断,系统自动开启距离缺氧区最近的增氧泵进行增氧,直至系统检测到该区域的溶解氧均达到设定的上限值。智能调控的工作流程如图5所示。
3 实验结果
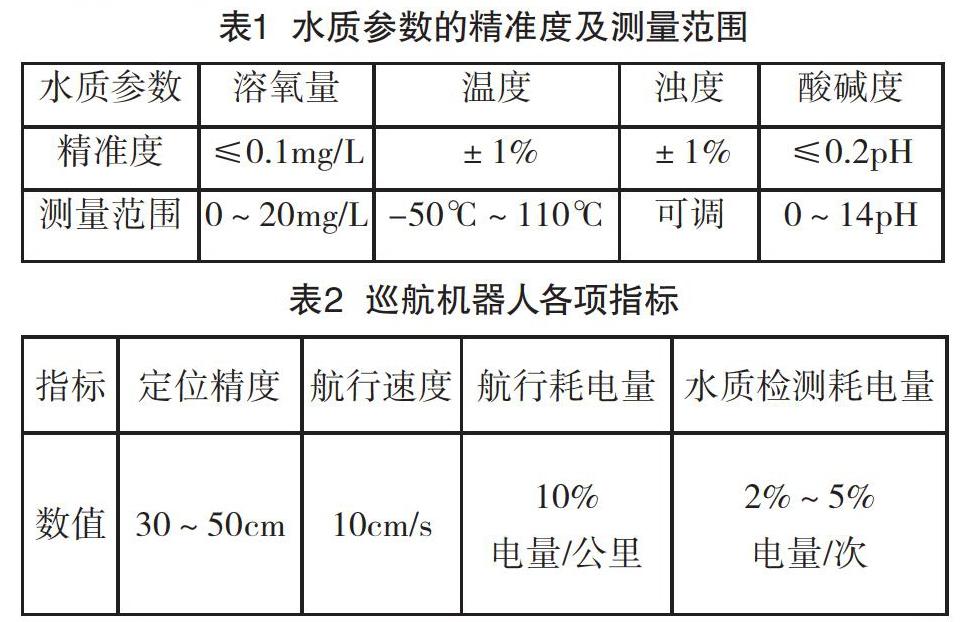
(1)水质参数的精准度及测量范围如表1所示。
(2)巡航机器人各项指标如表2所示。
4 结语
针对于传统淡水养殖存在水质参数难以全方位检测以及无针对性的水质调节浪费人力物力的问题,本系统通过智能巡航机器人对水质进行全方位检测,生成相对应的水质分布图,对水质异常的区域进行针对性的调节,能够很好的解决这一问题。我们进行了软件、硬件的设计整体调试,确保定位基站、巡航机器人、上位机、水质调节设备等能够达到预期效果。
参考文献
[1] 林永铖,林超洋,梁志锋,等.基于物联网技术的淡水养殖监控系统[J].电气技术,2015(10):59-62.
[2] 郑佳春,吴建华,马勇,等.混合模拟退火与粒子群优化算法的无人艇路径规划[J].中国海洋大学学报:自然科学版,2016,46(9):116-122.
[3] 金成松.ITS中基于UWB/IMU/GPS组合的协作定位方法研究[D].哈尔滨工程大学,2017.
[4] 周存.基于GPS和UWB精确定位系统的设计与实现[D].西安电子科技大学,2016.
[5] 刘智勇.曲面插值算法在三维地质建模中的研究[D].成都理工大学,2016.
