基于GPS的水下地形测量分析
2020-06-30韩毅腾
韩毅腾
摘 要:水下地形测量是一种非常重要的测绘工作,在港口建设、航运安全、水资源开发等方面发挥着重大的作用,随着我国经济的发展,测量技术也取得了很大的进步,尤其是基于GPS水下地形测量技术较为普及。本文阐述了GPS水下地形测量的基本原理、测量方法,并通过工程实践分析给出了具有实践意义的观点。
关键词:水下地形测量 GPS 实践分析
中图分类号:P228 文献标识码:A 文章编号:1674-098X(2020)03(b)-0009-02
水下地形测量是一种重要的测绘工作,在桥梁、水库、码头、港口等施工建设中水下地形测量有着很大的作用,它的主要工作内容是测量江河湖海以及近海水底点的平面位置以及相应的高程,以便绘制水下地形图,是现代水利工程中的一项重要工程技术[1]。根据不同条件和情况选择合适的方式进行水下地形的测量工作。
1 平面定位测量
1.1 全站仪测量
全站仪是全站型电子测距仪的简称,是将电、光、机融为一体的高科技测量仪器,能够实现水平和垂直角度、距离和高差的测量。全站型电子测距仪之所以叫全站仪,是因为仪器布置一回就能够完成该测量站的所有目标的测量。利用全站仪,按方位―距离的极坐标法进行定位。观测值通过无线通信可以立即传输到测船上的便携机中,立即计算出测点的平面坐标,与对应点的测深数据合并在一起;也可储存在岸上测站与全站仪在线连接的电子手薄中或全站仪的内存中。到内业时由数字测图系统软件,可自动生成水下地形图。
1.2 GPS定位测量
GPS的英文全称是Global Positioning System,中文名称是全球定位系统,它是通过近地轨道卫星在全球范围内进行实时定位的一个系统。GPS主要是通过近地轨道卫星的瞬时位置确定已知点的起点数据,并利用空间距离后交叉法确定要测量的位置。在实际应用中,可以利用动态或者静态测量的技术归解坐标数据,能够达到非常高的定位精度。GPS-RTK技术GPS定位技术新的发展方向,它是利用载波相位动态实时差分技术,能够达到厘米级的实时定位。在科学技术不断发展的今天,GPS-RTK在陆地地形测量、水下地形测量领域的应用已经非常广泛,推动了测绘技术的革新。
2 水深测量的方法
水下地形测量主要的内容之一就是水深测量。它是测定水底某点平面位置对应其在水面以下的深度,是河底、湖底、海底及其它水域地形测量的基本手段,根据使用的测量工具的不同,水深测量的方法可以划分为:声呐测量、激光雷达测量[2-3]。
2.1 声呐测量
声呐测量是根据超声波在均匀介质中以均匀速度传播并在不同介质界面反射的原理,选择对水的穿透能力最佳、频率在1500Hz附近的超声波,向水底发射声波并且记录声波发出和返回的时间间隔,通过特定算法得到水深数据。在水深测量和航海领域中声呐测量仪获得了广泛的应用。测深声呐分为单波束测深声呐和多波束测深声呐,在水下地形测量领域中,都得到了有效并广泛的应用和普及。
2.2 机载激光测深(LIDAR)
LIDAR的英文全称为Light Detection And Ranging,中文名称激光探测与测量。激光雷达测深的原理是从飞机腹部向水面垂直发射激光,一般发射特定波长的两种激光,分别为红色激光和绿色激光,红色激光光束由于理化特性照到水面会被反射,绿色激光光束则会照射到水里,直至到达水底再被反射出来,飞机上的激光接收器会计算两束光接收的时间差,这个时间差的一半就等于绿色激光从水面到水底的传播时间,根据光的传播速度和传播时间即可求得水深。机载激光雷达测深系统的可以探测50m左右的水深,精度能够保持在0.3m左右。
3 水下地形测量实践分析
3.1 工程测量
本文选择基于GPS-RTK的Sonic 2022多波束测深系统在国内某港航道水下地形测量中的应用进行分析和总结。该航道长约21km,航道的宽度约260m,选择1:2000比例尺进行施测。工程测量使用航标测量船,船长40m,船宽8.8m,吃水2m,动吃水0.06m。Sonic 2022多波束测深系统按要求安装在测量船指定位置上。工作前使用GPS-RTK测定坐标转换参数、利用声速测试仪测量水域的声速剖面曲线一同录入到采集软件系统中,在港口池里选择平坦的以及地势变化较大的区域分别设立一条平行的测线进行多波束安装校正,包括横摇、纵摇以及艏摇等。工程测量时GPS-RTK多波束测深系统选择100°扫宽,调入已定的网格和测线,运行系统的各个仪器设备,当航标测量船进入测量区域并沿着已定测线航行时,各个仪器设备开始实时采集测量数据,同时形成数据文件记录保存在电脑里。数据采集由Qinsy软件配合Qloud2.3数据采集软件完成,本次扫测完成后,经现场观察及后期数据回放检查,扫测范围内测线覆盖良好,没有出现空白区。后期图形处理软件采用HYPACK软件,最后生成1:2000 航道水下地形图。
3.2 成果分析
为了验证GPS-RTK多波束无验潮测深技术的高效性、准确性及可靠性,采用二种方式进行验证:(1)系统内符合验证;(2)系统间平面定位精度误差对比。
(1)系统内符合验证。测量过程前需布设多条交叉重叠的测线进行水深测量,采用相对精度评估的方法,摘录其中1958 个重复测量点进行误差分析。经过统计分析本回测量有96%的测深值偏差小于0.1m,100%的测深偏差小于0.3m,符合国家标准及相关规范要求[4]。
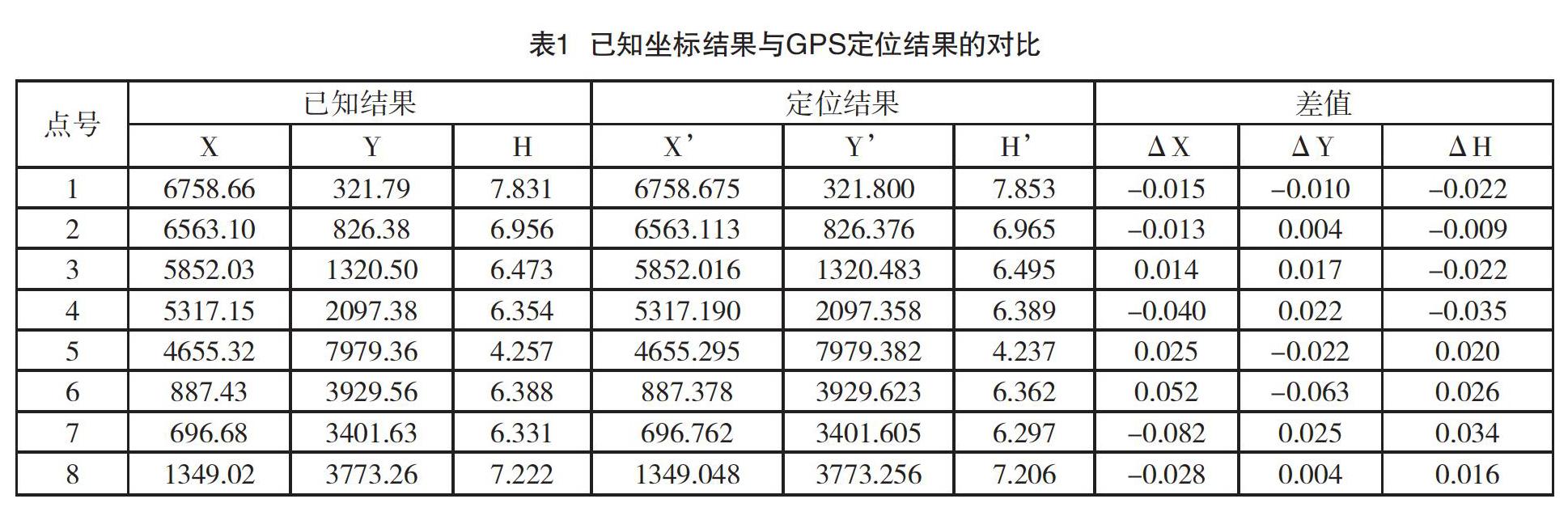
将本次GPS-RTK作业中的坐标定位的结果与全站仪获得的坐标结果(已知)进行比较(见表1),可知,GPS-RTK取得的坐标点位,其精度可达厘米级,各点位之间不存在误差积累,与全站仪取得结果符合度高,满足水下地形测绘的要求[5]。
(2)Sonic 2022多波束测深系统与HY1602双频测深系统间测量误差对比。在航道较平坦区的水下,采用双频单波束测深和GPS-RTK多波束无验潮测深两种方法分别对同一片区域(测区范围内200m×500m 范围)进行测量。将产生的两组数据在HYPACK中进行点对点对比。其中,灰色数据点为Sonic多波束测得的水深数据,黑色数据点为HY1602双频单波束测深仪测得的。从两组原始数据中提取坐标相近的60个数据点(XY相差不大于0.3m),将它们的水深值进行比较,对比结果的精度符合规范的要求,判定是合理的。
4 结语
伴随科技力量的进步而日益成熟的GPS-RTK技术,给水下地形测量带来了全新的革命,尤其是GPS-RTK无验潮技术与多波束测深系统的结合可以使得水深測量作业测量范围更大、效率更高、精度更可靠。同时,减少了人工和设备成本,不要求通视条件,全天候作业的方式,极大地推动了水下测绘的发展。本文通过阐述平面定位和水深测量的传统及先进测量方式,经过实践分析和数据比对,确认基于GPS-RTK的多波束测深系统能够满足水下地形测量的精度和效益要求。
参考文献
[1] 高斌,吴向阳,刘娟.GPS在水下地形测量工程中的应用[J].测绘科学,2009(34):228,258.
[2] 汪志明.差分GPS和测深仪组合系统在水下地形测量中的应用研究[D].武汉大学,2003.
[3] 李学恒.水下地形测量技术方法应用分析[J].工程技术,2007(2):63-64.
[4] 国家质量技术监督局.GB12327-1998海道测量规范[S].北京:中国标准出版社,1999.
[5] 方颖.长江口水下地形测量数据处理[J].测绘通报,1999(3):31-32.
