基于等离子体流动控制的方背式汽车模型减阻研究*
2020-06-29王靖宇耿亚林胡兴军李天鸿刘子诚李久超
王靖宇,耿亚林,惠 政,胡兴军,李天鸿,刘子诚,李久超
(吉林大学,汽车仿真与控制国家重点实验室,长春 130022)
前言
车辆在高速行驶时,超过60%的能源消耗是空气阻力造成的,而日趋严苛的燃油消耗法规和电动汽车对提高续航里程的迫切需求,对降低车辆的气动阻力提出了更大的挑战。传统的被动流动控制方法如优化汽车外型[1]、加装气动附件[2]等研究较为成熟,但减阻能力有限;在此背景下,开发新的主动流动控制方法,利用外部能量来改变车身周围气流的拓扑结构,为进一步降低车辆的气动阻力提供了可能。
表面介质阻挡放电(surface dielectric barrier discharge,SDBD)等离子体激励器是一种新型的主动流动控制装置,相关研究开始于2000年[3]。与机械式合成射流相比,SDBD等离子体激励器的主要优势在于无需变动机械部件,响应快,功耗低,且不改变被控制体的外形[4]。尽管目前SDBD等离子体激励器输入的电能绝大部分都转换成了热量,电能的有效利用率不到0.1%[5],且产生的驱动力很小,但这为流动控制提供了一条新的思路,具有其他流动控制方法所不具备的优点。随着等离子体理论和技术上的不断突破,动能转化效率逐渐提高[6],尽管SDBD激励器工作电压较高,但对电流的要求很低,只有几毫伏,因此是安全的。美国Plasma Stream Technologies公司在过去几年已对该新型流动控制方法在8级半挂货车缩比(1∶12)模型上的应用做了较多研究,并积极推进该项技术的市场化,其应用前景将十分广阔。
这种控制方法在边界层转捩控制[7]、机翼增升减阻[8-9]和气动噪声控制[10]等诸多领域都有了大量的深入研究,但应用于地面车辆减阻的相关研究还处于起步和探索阶段。Boucinha等[11]首次对SDBD应用于汽车减阻进行了探索,通过在Ahmed模型(25°尾角)后窗上不同位置布置激励器并进行组合控制,发现将激励器布置在后窗顶端的减阻效果最好,并在10 m/s的风速下获得8%的减阻效果;Barros等[12]在方背 Ahmed模型(0°尾角)尾部加装圆形导流装置,利用射流的主动控制与导流板产生的康达效应,实现了20%的减阻。
本文中在 Boucinha[11]和 Barros[12]的研究基础上,对方背Ahmed模型进行进一步尾流控制研究。首先,通过静态试验研究了不同激励电压下离子风的气动特性,获得最佳激励电压下的最大诱导速度;然后在不同风速下,研究了激励电压对流动控制效果的影响。本研究的目标是通过探索等离子体激励器对简化模型的流动控制规律,深入研究减阻机理,为将来此项技术实际应用于汽车减阻做准备。
1 试验设备介绍
1.1 试验模型
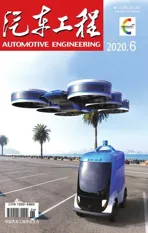
Ahmed模型[13]是汽车空气动力学研究中常用的简化模型,本文中选用方背Ahmed模型,如图1所示。模型的主要尺寸为:长L=1.044 m,宽 B=0.389 m,高H=0.288 m,模型离地间隙h=0.05 m,圆角R=0.1 m,支撑圆柱直径0.03 m。
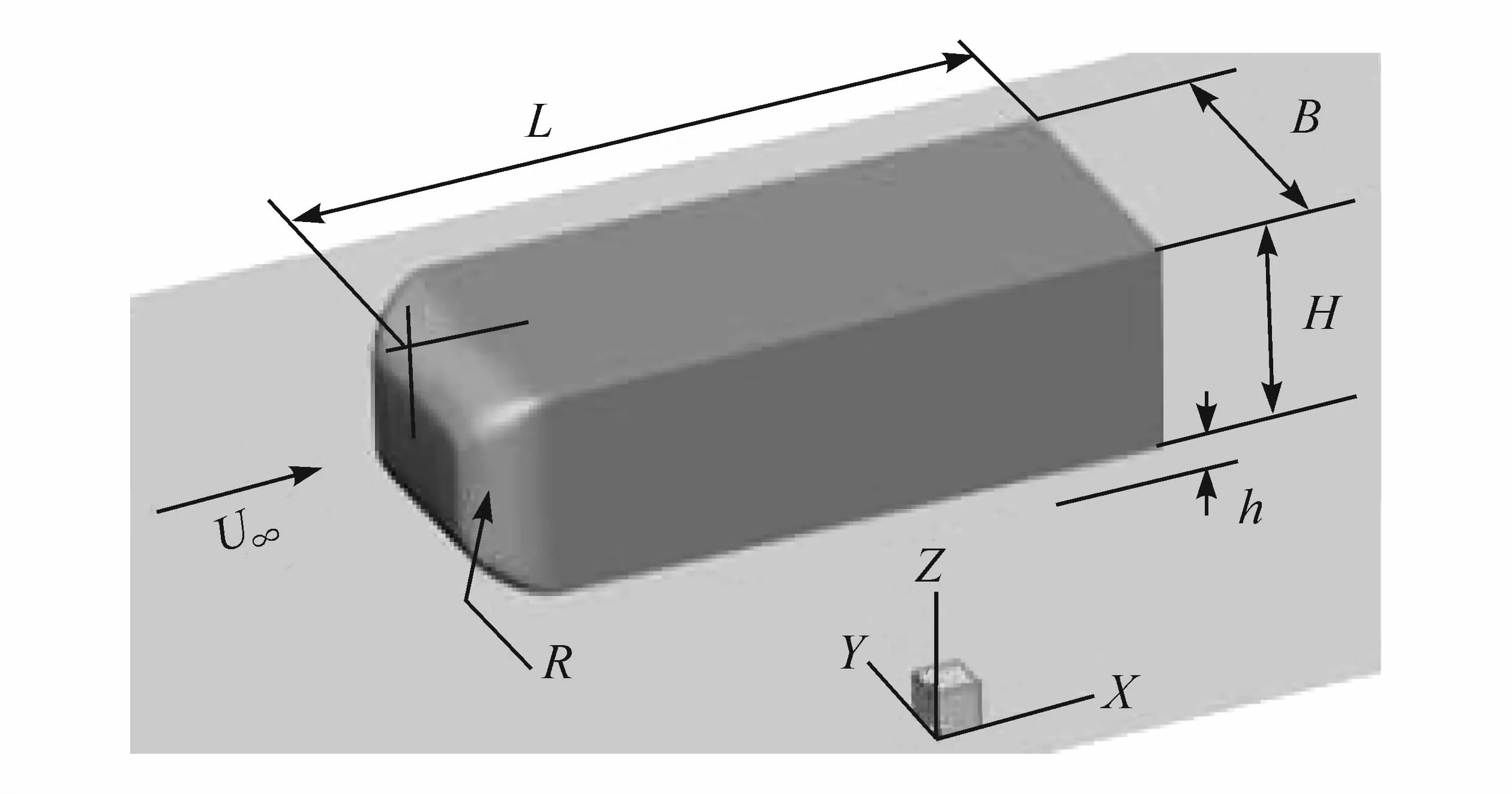
图1 方背Ahmed模型示意图[14]
1.2 风洞与测量设备
试验在吉林大学回流式汽车风洞进行,风洞喷口尺寸4.4 m×2 m,试验段长度8 m,来流湍流度低于0.5%。模型表面压力测量采用96通道压力扫描阀,量程为1 psi,精度为±0.05%。阻力测量采用六分量天平,天平 X方向量程为 200 N,精度为0.05%。流场速度测量采用二维PIV,激光器可产生最大激光能量200 mJ的532 nm波长激光,CCD相机像素为1 024×1 280,相机拍摄和激光发射频率为4 Hz,将每一工况拍摄的400组相片取平均得到时均速度场,其中判读区窗口为32×32像素,重叠率为50%。
1.3 等离子体激励器与电源
研究所用激励器如图2所示,由厚度均为0.018 mm、宽度分别为2和20 mm的上下两个电极组成,电极之间由6层厚度为0.06 mm的聚酰亚胺绝缘胶带(εr=3.5)和1层厚度为0.13 mm的聚四氟乙烯(εr=2.6)组成的介质隔开,介质总厚度hd=0.49 mm。上电极连接到可提供0-30 kV峰值电压、最大输出功率为500 W的高压交流电源(CTP-2000K,南京苏曼),下电极接地。
图2 SDBD等离子体激励器
2 等离子体激励器诱导离子风的气动特性
2.1 静态试验
根据电流体力学(electro hydro dynamic,EHD)理论,当外加电压达到击穿值时,绝缘介质上方的空气分子会被电离形成等离子体,带电粒子在电场力作用下移动,与激励器周围气体中的中性粒子发生碰撞,增加途经该区域气流的局部动量,进而诱导出离子风[15-16]。本文中首先将激励器布置在平板上,如图3所示,通过静态测试研究激励器诱导离子风的气动特性。为与下文安装在Ahmed模型上的激励器保持一致,激励器有效放电宽度与Ahmed模型宽度相同,为0.389 m。试验激励峰值电压Upp范围为9-18 kV,增幅间隔为1 kV,频率为7.2 kHz。在PIV流场图中,水平方向为X轴,垂直方向为Y轴,上电极的末端为坐标原点,坐标系如图2(a)所示。
图3 激励器静态试验布置
2.2 静态试验结果分析
图4 展示了不同激励电压Upp下离子风的时均速度场。由图可见,激励电压对于诱导射流强度的影响非常明显。在电压较低时,激励器诱导的射流速度低,并在高度方向上很快地扩散。随着激励电压的增高,电极之间的放电愈加强烈,诱导射流的长度逐渐扩大。与时均后的离子风速度场不同的是,实际上离子风的产生是非定常的,会周期性诱导出涡结构,其脉动频率与交流电源频率相同[17]。由于离子风的脉动周期在10-4s量级,远小于流动响应的时间尺度10-2s量级,因此,多数研究者认为在高频交流电压的持续作用下,激励器对外部流场的影响是定常的[18]。
图5为不同激励电压Upp与最大诱导速度的拟合规律。由图可见,最大诱导速度随激励电压的升高逐渐增大,但增速逐渐变缓,该趋势与Forte等[19]得到的趋势一致。当电压大于某一值时,继续増加电压,诱导速度不再提高,甚至有所下降。这是因为导电率升高,等离子体以较高的密度排出,降低了区域内的等离子体密度,使激励器的推力减小,诱导速度下降[20-21]
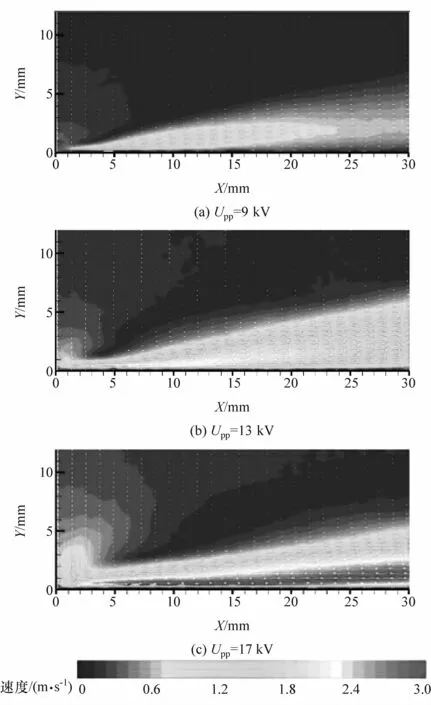
图4 不同激励电压下离子风的时均速度场
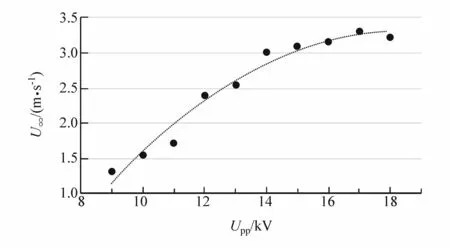
图5 不同激励电压下的诱导速度
3 等离子体激励器对模型尾部流动的控制
3.1 试验布置
采用PIV速度场测量、表面压力测量和气动阻力测量等方式,利用风洞试验研究了等离子体激励器在方背Ahmed模型尾部流动中的控制作用。模型试验布置如图6(a)所示,为避免风洞地面边界层对试验的影响,将方背Ahmed模型固定在地面上方0.5 m的平台上,并在平台前缘倒角,避免气流在此处产生边界层分离。模型距离平台前缘距离1L、后缘3L,平台总宽度7B。PIV激光器布置在平台最后方,CCD相机布置在模型侧面平台以外的位置,测压管穿过支撑圆柱在模型内部与尾部上的测压孔相连,模型天平布置在模型下方平台内,激励器布置位置的上游用绝缘胶带贴平,以上试验布置均有效避免了对流场产生干扰。另外,试验阻塞比小于2%。
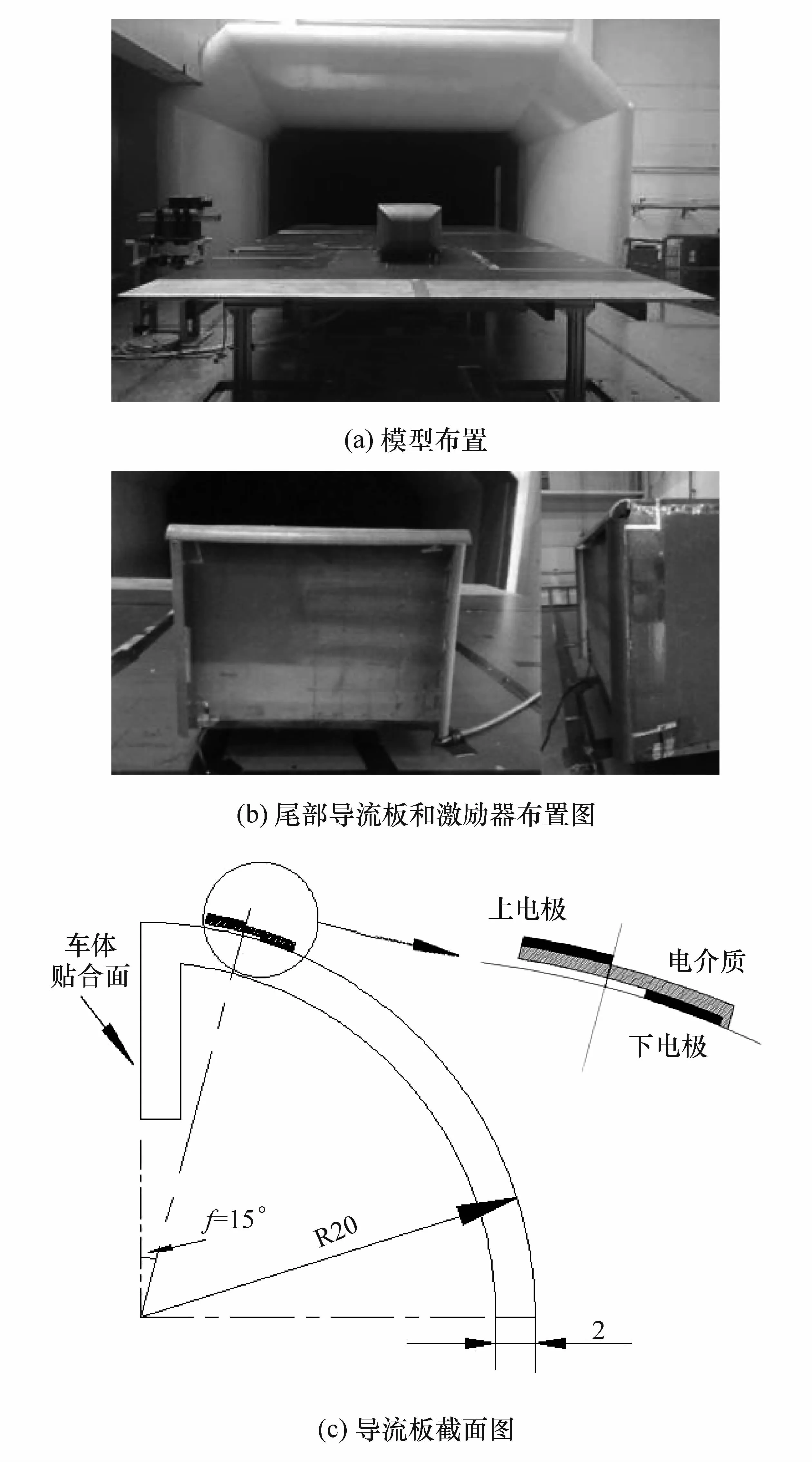
图6 试验布置
由于等离子体激励器诱导的风速较低,将其直接布置在大角度分离的分离点附近,难以实现有效的流动分离控制。因此,本文中设计了直径为40 mm的1/4圆圆弧导流板,将其固定在模型尾部上侧和左右两侧,并将激励器安装在3个弧形导流板上,激励器上电极末端位于圆弧f=15°位置,3组激励器同时工作,如图6所示。底部因距离地面较低,不易布置激励器,主要研究激励器对上侧和左、右两侧的气流控制。
利用压力传感器对模型尾部42个点进行表面压力测量,由于对称性,测压孔只布置在尾部的一侧区域,其位置如图7所示。
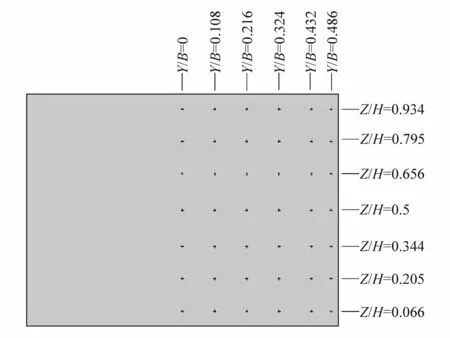
图7 尾部测压孔位置
对模型尾部表面静压数据进行处理,根据式(1)[22]可得压力系数 Cp分布。

式中:p为试验测得的车身表面静压;p∞为来流静压;ρ为空气密度;u∞为试验来流风速。
3.2 测试结果分析
加装导流板和激励器都对模型尾部起到一定的减阻效果,为区分导流板和激励器分别产生的减阻效果,定义了不同的减阻率。
被动减阻率ΔCdp用于评价导流板的减阻效果,其定义为

主动减阻率ΔCda用于评价激励器的减阻效果,其定义为

总减阻率ΔCdt用于评价导流板和激励器两者共同作用的综合效果,其定义为

式中:Cd0为原车的阻力系数;Cdoff为加装导流板和激励器且激励器关闭时的阻力系数;Cdon为加装导流板和激励器且激励器开启时的阻力系数。
安装导流板后的被动减阻率如表1所示,在不同的风速下,均有4%以上的减阻效果,且在低风速下减阻效果最好,最大减阻率为-4.65%。

表1 安装导流板后相对于原车减阻率
图8为低风速(5 m/s)下,尾部横截面流场烟流显示。对比激励器开启前后烟流效果可以看出:在激励器关闭时,两侧气流从侧缘导流板上分离,形成较宽的尾部分离区,且能明显地观察到尾流中存在两个横向涡,导致尾流流态较为杂乱;激励器开启后,两侧气流受激励器能量注入的影响,推迟了气流在导流板上流动的分离,使得两侧气流向中间收缩,尾流宽度变窄,并加快了两侧气流的汇集,缩短了尾流长度,同时气流也变得更为光顺。
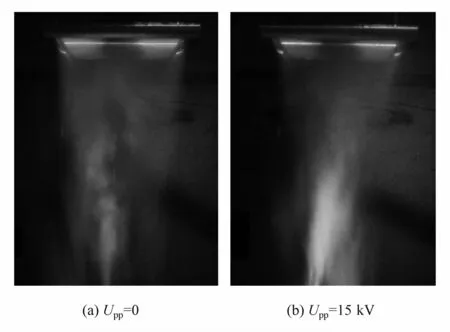
图8 尾部横截面流场烟流显示
从烟流效果上看,激励器对模型尾流中两侧横向涡的控制效果显著,使尾部气流分离区明显减小。流动的变化会导致流场中压力分布的改变,进而引起模型气动阻力的改变。
下面对模型尾部纵向中截面的PIV速度场进行分析,以观察等离子体激励器控制下的尾涡变化,进一步探究激励器的减阻机理。由于不同电压激励下的流场变化差异较小,此处只展示15 kV激励电压控制下的流场图。
图9为尾部纵向中截面的速度云图。可以看出,安装导流板后尾流区长度明显减小,且激励器开启后,尾流区域进一步减小。分离区减小是导致尾部区域压力升高的主要原因,因此等离子激励器是通过推迟尾部气流的分离,减小分离流长度,提高尾部压力,减小模型的压差阻力,来起到减阻的作用。
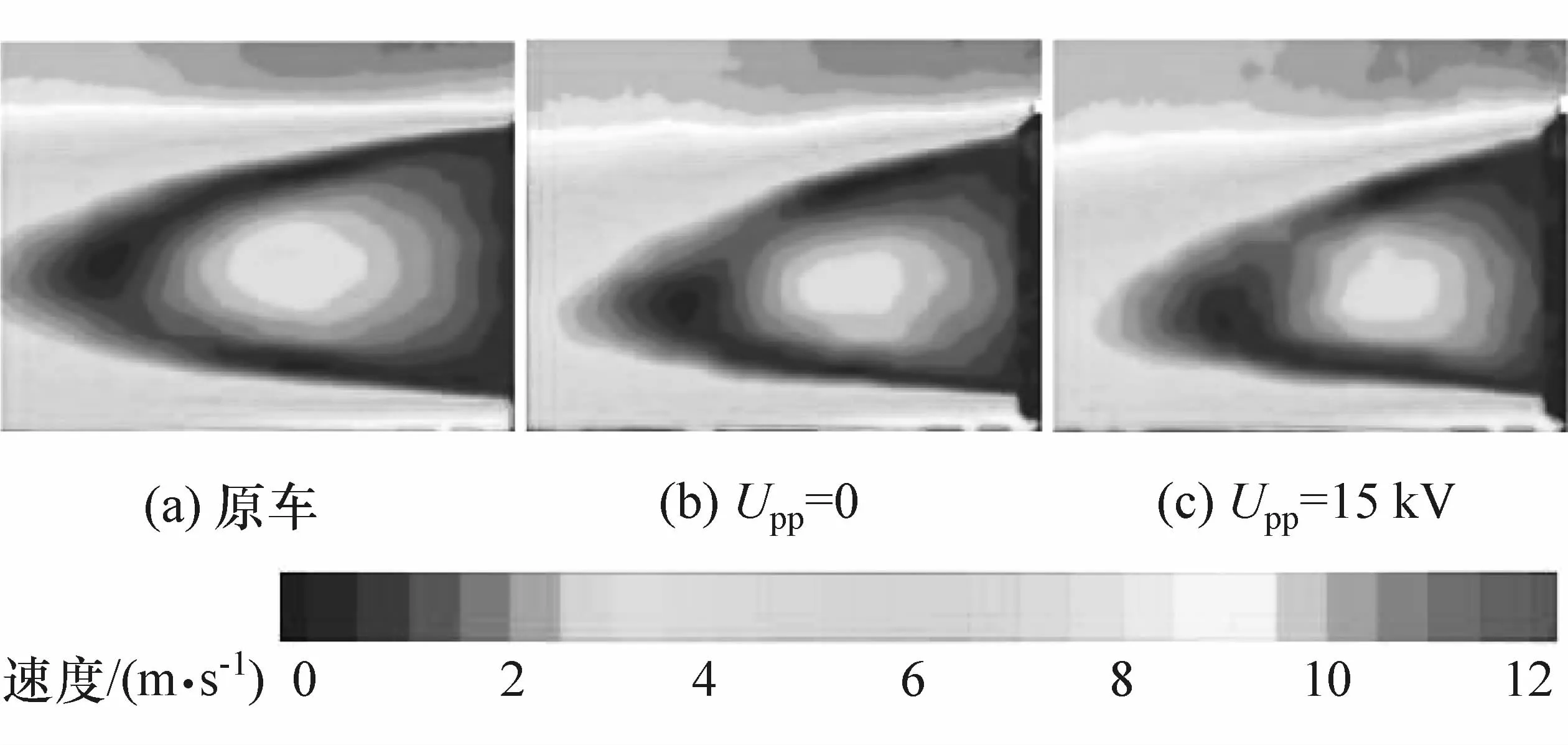
图9 10 m/s时激励器控制下的尾流场中截面速度云图
图10 为纵向中截面(y=0)的流线图。可以看出,无激励器控制时,尾流中主要存在一对反向旋转的旋涡(以F1和F2为中心),上层涡旋的强度较大,且涡旋中心相比于下侧涡旋中心距离车体更远,这是由于较小的离地间隙一定程度上限制了气流从模型底部流入尾迹,抑制了下层涡的形成,导致下层漩涡能量较低,这种不对称性在其他类似试验中也能观察到[23-24]。导流板和等离子体激励器的控制导致了尾流拓扑结构的改变,在图10(b)和图10(c)中可观察到尾迹的总体减小和上下涡的前移。顶部激励器引入到流动中的动量改变了上层气流的流动,引起上层尾涡结构大小和位置更明显的改变,导致上层涡旋中心的位置逐渐超过下层漩涡,距离车体的横向距离更小。
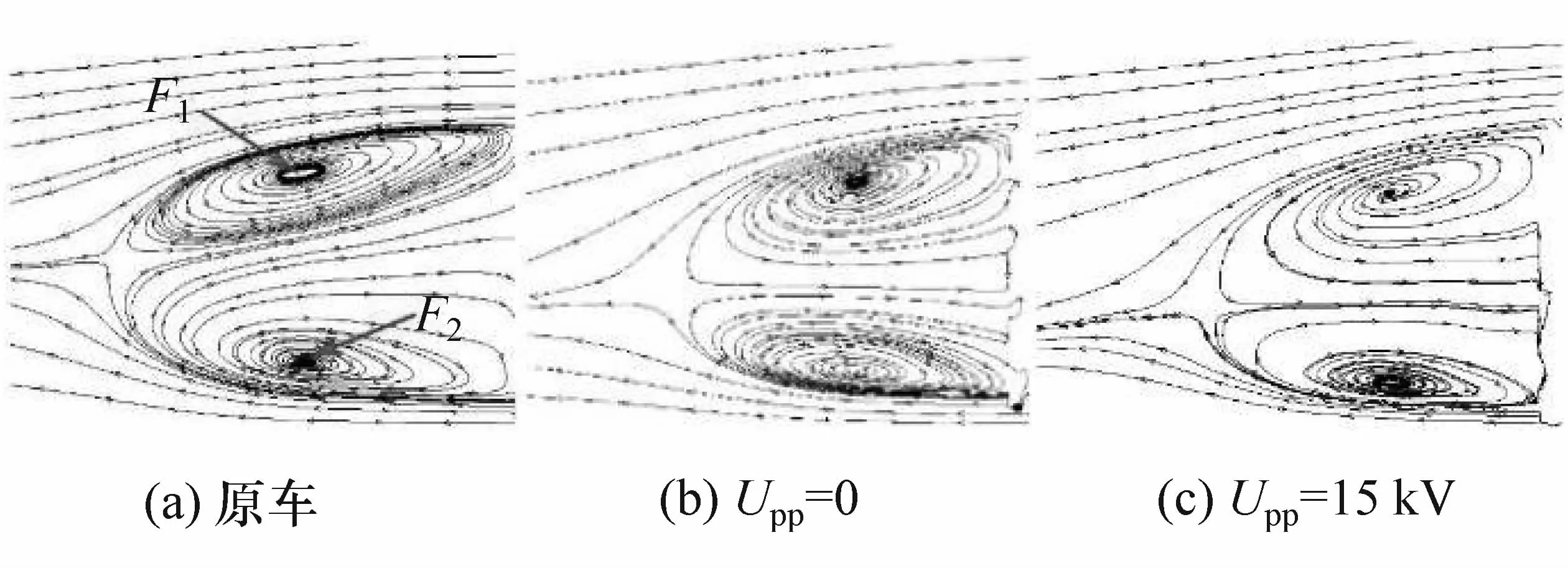
图10 10 m/s时尾流场中截面流线图
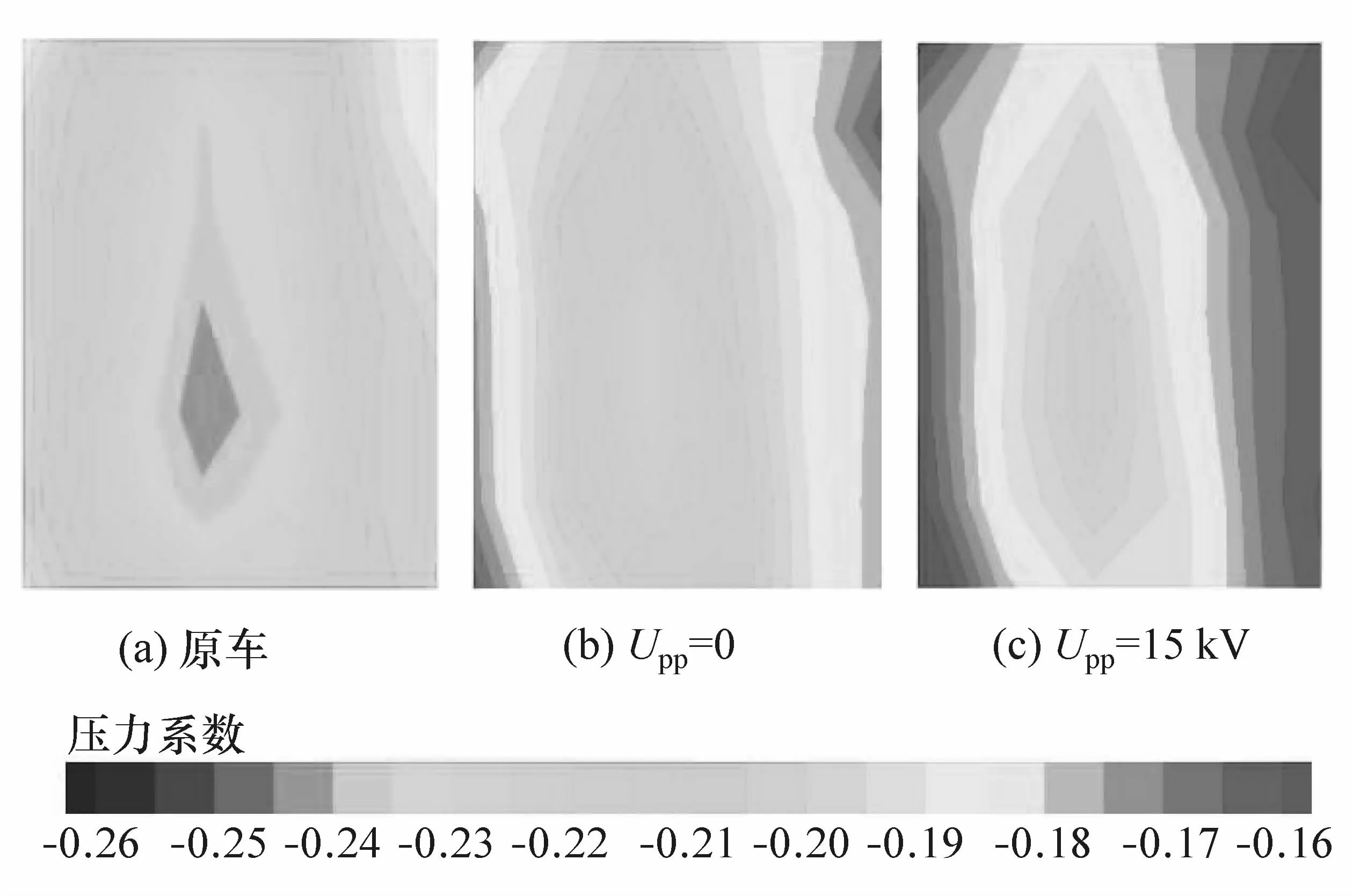
图11 10 m/s时不同控制电压下的压力系数云图
图11 为较低自由来流速度时不同激励电压控制下的尾部压力云图。可以看出,原车压力云图中间偏下存在一个低压中心,这是由于尾流场中存在两个对称的横向涡所致,而下方由于地面的限制,来流较少,导致底部压力比顶部偏低。整体压力分布较均匀,平均压力系数在-0.22左右。这与Volpe等[25]的试验结果一致。
安装激励器后,压力云图右上方出现一个局部的高压区域,这是由于上侧和右侧导流板连接缝隙,引入了部分尾流,导致此处压力偏高。对比不同激励电压下的压力云图可以看出,随着激励电压的升高,尾部整体压力也逐渐升高,且模型右侧边缘附近和模型尾部中线附近的压力变化最为明显,主要是由激励控制后模型尾部两个对称横向涡的变化引起的。底部未加装激励器,所以压力变化较小。
表2为不同速度、不同电压控制下的减阻率。由表可见:随着激励电压的提高,主动减阻率和总减阻率逐渐增大,这与图11中尾部压力变化的趋势一致;在10 m/s、17 kV的激励电压下,达到最大的减阻效果,此时主动减阻率为-4.58%,总减阻率为-9.02%。
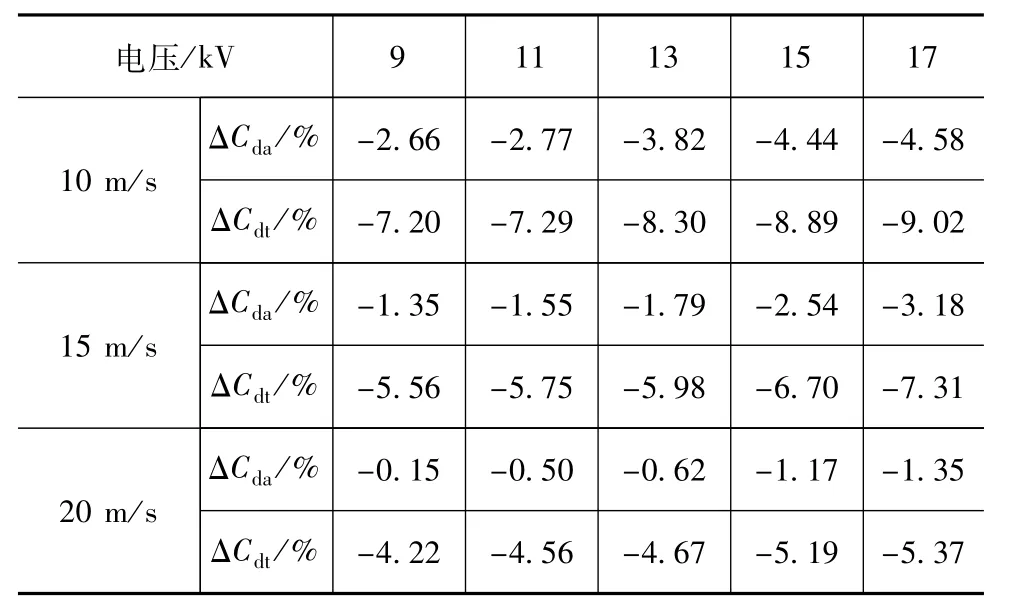
表2 不同速度、不同电压控制下的减阻率
对比不同风速下的减阻率可以看出:随着风速的提高,激励器减阻效果和综合减阻效果皆明显下降,在17 kV而速度提升至15 m/s时,主动减阻率降至-3.18%,总减阻率降至-7.31%;风速进一步提升至20 m/s后,在较低激励电压下,几乎起不到控制效果,在最大的激励电压17 kV下,其主动减阻率降至-1.35%,总减阻率降至-5.37%。此时相对于原车,其主要的减阻贡献来自于导流板,由于激励器产生的诱导射流强度有限,在高风速下的减阻贡献较小。
4 结论
导流板和等离子体激励器的控制导致了尾流拓扑结构的改变,上侧气流下引和左右两侧的气流向中间汇集,导致尾部分离区缩小,尾迹缩短,同时纵向涡和横向涡的减小,使尾部气流变得光顺,降低了尾流区的能量耗散。以上流场的变化,使尾部压力提升,从而起到减阻的效果。
主动流动控制效果随着激励电压的增长而提高,在17 kV的激励电压下,主动减阻率为-4.58%,总减阻率达-9.02%。但该研究受离子风强度限制,并未达到模型的减阻极限,若继续对激励器的气动性能进行优化,有望获得更大的减阻效果。
等离子体激励器可有效推迟尾部气流的分离,减小分离流长度,从而提升尾部压力,减小模型压差阻力,最终达到减阻的目的。