基于CPLD芯片的视频图像码率控制方法研究
2020-06-29
(成都理工大学 工程技术学院,四川 乐山 614000)
0 引言
在视频应用时,码率控制占据重要地位,保障码率得以约束的前提下,码率控制以提升编码图像的质量水平为目的。为得到更优质的视觉感受,拥有相同的图像质量为视频编码期望特性之一[1]。一般情况下,码率控制算法的优化力求帧图像失真度最小,这堪称整体意义上对图像质量进行优化,也许会造成各帧图像内每个宏块的信噪比不集中分布的问题,图像每个部分质量波动很大,导致了主观视觉质量水平降低[2]。在目前的视频压缩编码标准中,由于对视频序列中类型不一样的帧采用不一样的编码方式,与此同时,每个帧图像的活动性也不一样,导致每个帧编码后生成的比特数有某些差异[3]。
编码速率控制是为了使编码器输出的码流达到稳定,尽可能消除编码端缓冲器溢出问题,进一步提高重建图像质量。过去利用小波视频码率控制方式,该方式可以针对信号执行多分辨分析与时频局部化操作,恢复图像满足人眼的主观需求,借助三维最小度分解原始图像序列,之后借助修改后的等级树集合分区的算法量化效度系数[4]。即便此方法有很好的控制效果,但因为交换缓冲器的容量不是无限的,视频码流的突发性有形成拥塞的危险,继而造成丢失缓冲器溢出与信元的后果,传输的服务质量会降低。因此,以CPLD芯片为基础的视频图像码率控制方法研究被提出。
1 基于CPLD芯片的视频图像码率控制
此控制方案利用以CPLD芯片的码率为基础的控制方式,借助它的低复杂度、高控制精度达到提高运算速度与控制精度的目的,使当前码率控制算法的性能占据较大优势[5]。该控制方案的码率控制方法主要由CPLD芯片视频图像灰度增强、视频质量控制、主动跳帧控制和编码码率控制4个模块组成,如图1所示。
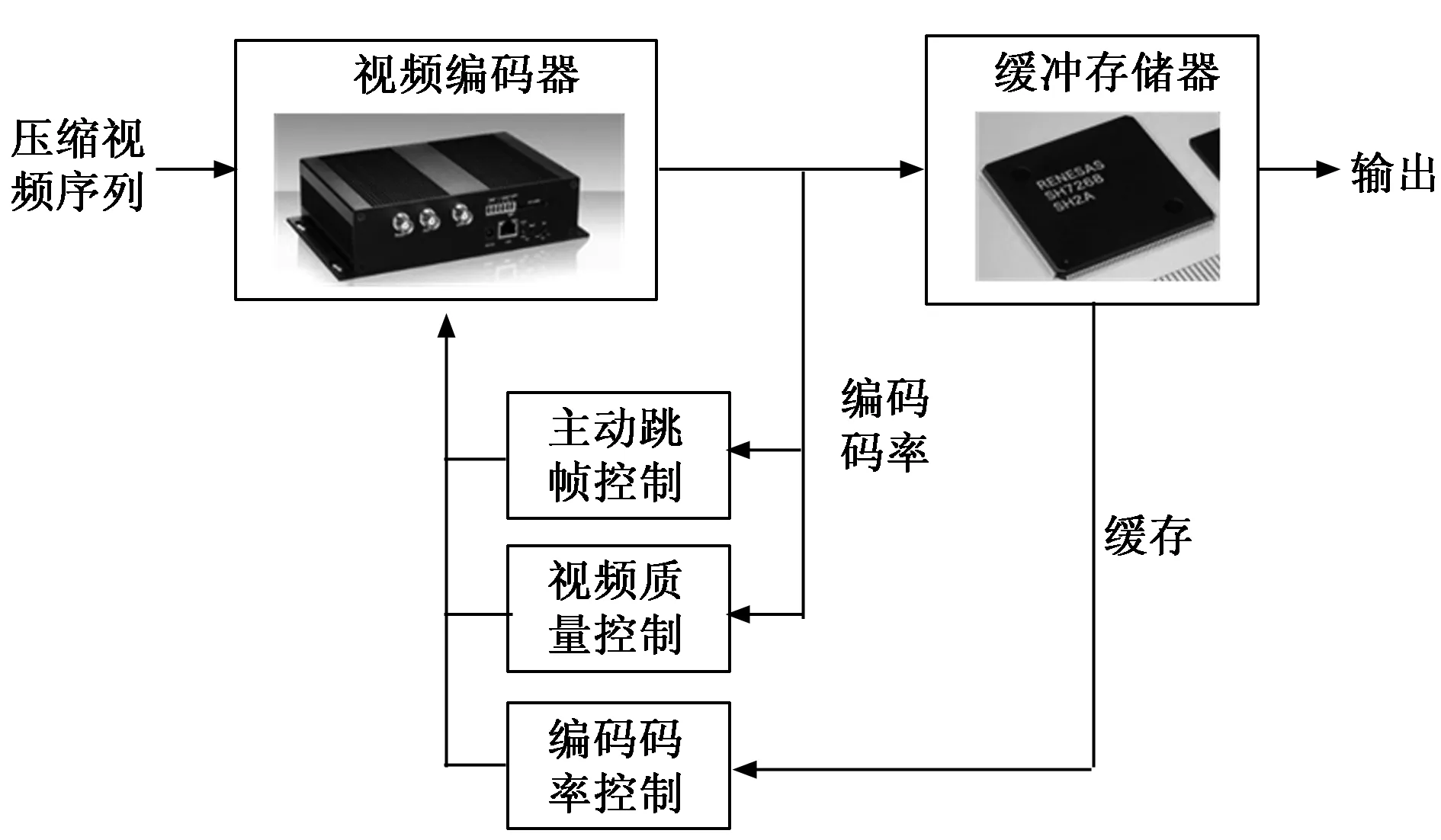
图1 基于CPLD芯片的视频图像码率控制框图
1.1 基于CPLD芯片视频图像灰度增强
借助视频解码芯片,解码当前的模拟视频信号,并将模拟视频信号转化成数字视频信号,再采用可编程逻辑器件CPLD,完成灰度线性变换指令,使视频图像的灰度进行增强[6]。
1.1.1 视频解码
视频解码芯片采用9位视频输入处理器,其型号为sAA7113,该视频输入处理器来自于Philips公司。在系统中这个芯片的主要功能是使复合视频信号CVBS完成A/D转换指令,并输出一个数字视频信号在YUV 4∶2∶2格式中符合ITU656标准,即取样频率的两倍(13.5 MHz)行参考信号HREF、场参考信号VREF和半像素时钟信号LLC[7]。由于信号钳位、对比度控制、饱和度控制、抗混叠滤波、自动增益控制与亮度控制等能够在视频解码芯片内部完成,因此,只有在系统上电复位后,依据I2C总线,才能正确地执行视频解码芯片内部相关控制寄存器完成初始化设置,即可获得高质量的数字视频信号和时钟信号,用于同步所有系统[8]。
1.1.2 视频信号格式统一
图2是一行像素数据的格式。
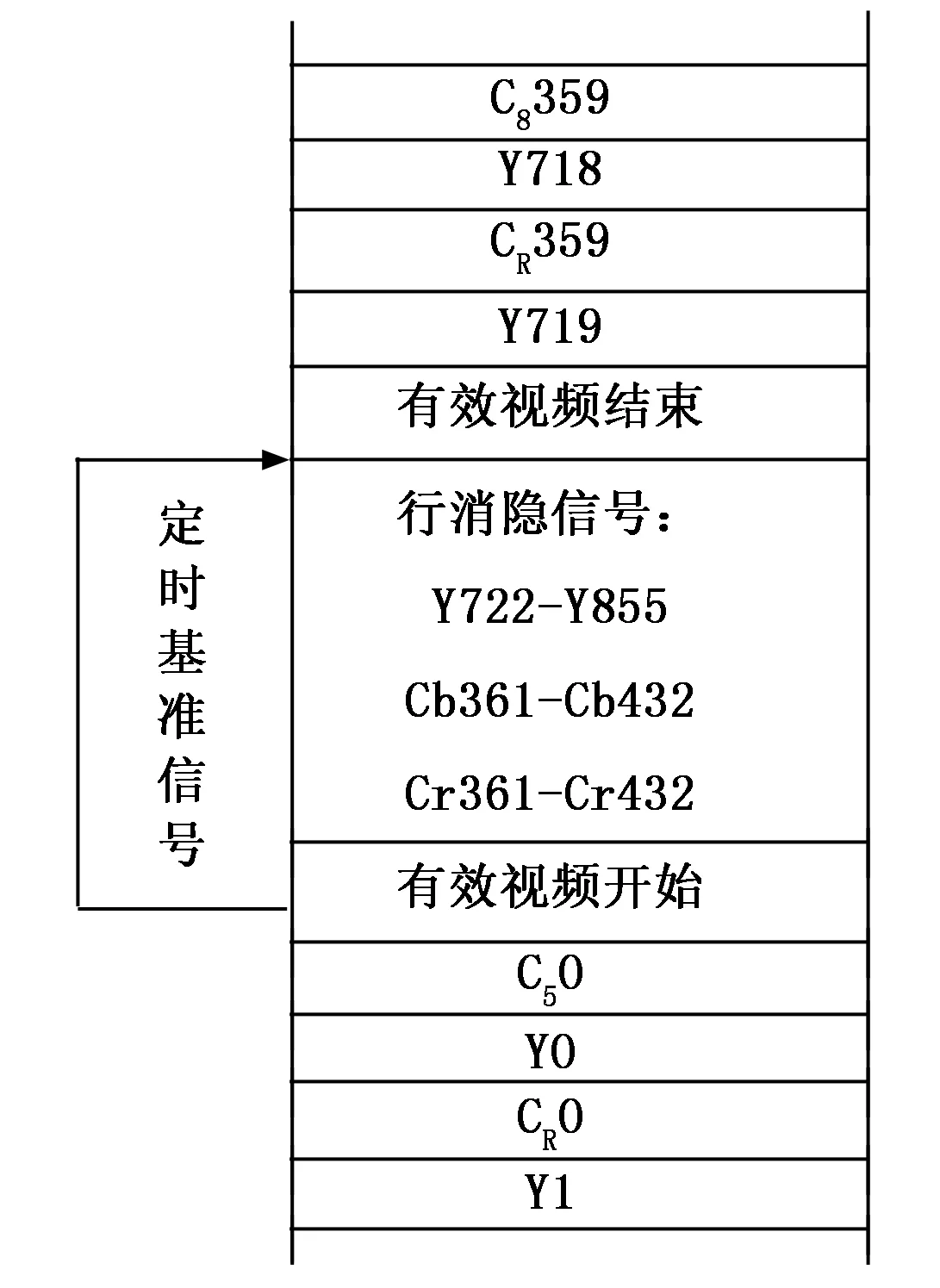
图2 视频信号格式统一
因为数字视频信号在YUV4∶2∶2格式中,色差信号取样率是亮度信号取样率的一半,所以每两个像素时钟周期输出两个色差信号Cb,Cr和一个灰度信号Y。在CClR556倡议中,将视频数据中的量化值设定为255和0,并记为保留值。量化数据的串行输出按此循环,其顺序为:Yo、Uo、Y1、vo、Y2、U1、Y3、V1、Y5、U2、Y6、V2[9]。
1.1.3 视频图像灰度增强处理
通过灰度线性变换指令,使视频图像的灰度进行增强,并利用Verilog HDL叙述CPLD执行算法。再运用SAA7113模拟数字转换,输入8位数字视频信号VPI。在8位灰度映射表中,选择拨码开关、半像素时钟信号LLCI与行场同步Vref、Href;并将输入的半像素时钟LLCO与8位数字视频信号VPO发送到sAA7121H处理器。当每个半像素时钟信号处于上升沿时,判断像素是否处于行程状态或进程状态。如果是,则设定初始为首个进行上下行参考的信号,将偶数位的取样点进行灰度变换,根据波码开关的输入值选择相应的变换函数。在进行灰色映射时,使用case分支语句将需要处理的灰色映射表和灰度级进行关联。将奇数取样点均设定为0X80(对应的色差信号为0),去除颜色信息的同时,对图像进行灰度变换。
1.2 编码码率控制
在视频编码中,为了达到码率约束要求目的,需利用固定的比特率输出,图像的量化参数会持续变化,图像质量亦会产生波动;为保证质量的均匀,一般情况下利用确定的量化参数图对图像执行量化处理,但是如此输出的编码比特率非恒定不变,在有带宽限制的应用中无法适用。如图3所示。
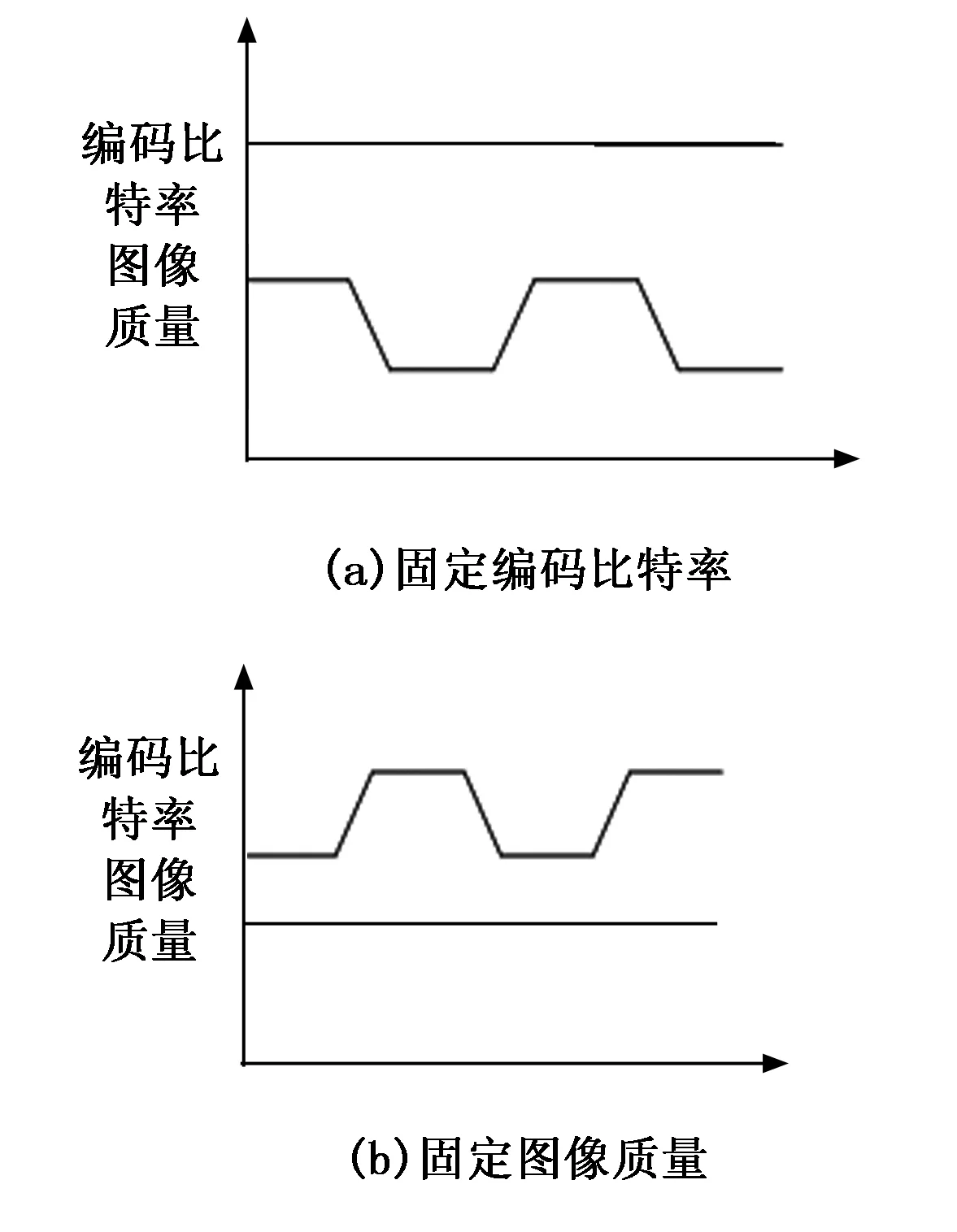
图3 固定编码比特率与固定图像质量之间关系
在率失真理论的码率控制中,优化策略以码率约束满足为前提,让全部编码图像的失真度为最小值。因为图像内容存在差异,在码率固定的前提条件下,每个宏块的量化参数必然会有波动,造成图像的不同部分质量产生波动,对主观视觉质量造成影响。考虑到以上两种编码方法(获取固定码率的编码方法与获取一致的编码质量的编码方法的特性),所以,一种码率控制方法被提出了:码率约束达到要求后,最小化每个宏块量化参数的方差。借助此种优化方式,能够让宏块量化参数分布更为集中,近似于量化参数固定编码方式,进而取得均匀相同的图像质量;与此同时,因为带宽约束得到满足,固定码率的编码方式亦可以应用于带宽受限的应用环境中。确保正确解码,每个宏块的量化参数会被执行编码操作并且向解码端传输。
被提出的码率控制以CPLD芯片为基础,采用的码率控制方法先计算目前缓冲区比特数,
(1)

依据上述内容,编码帧目标比特数为:

(2)
式(2)中,λ表示缓冲延迟系数。
提出的基于CPLD芯片的视频图像码率控制方法需依据当前渲染到纹理值,统计报文丢失率,结合CPLD芯片视频图像灰度增强处理内容,估计报文传输所需的比特数,具体控制步骤如下所示:
Step1:跳帧控制
统计缓冲区大小,重新计入EC编码,以此作为数据开销;
Step2:信道状态估计
统计前两帧图像传输反馈的数量,计入纠错报文之中,由此计算报文出错率;
Step3:估计需要纠错时间
设置缓冲区图像帧数和报文长度,依据所需发送的报文总数纠错报文出错率,通过搜索方法计算所需纠错报文数目;
Step4:确定采用的编码帧分配所需的比特数,将Step3中得到的渲染到纹理值带入其中,并根据选择的模式估计纠错报文所需比特数。
依据上述内容,完成编码码率控制。
1.3 视频质量控制
在视频码率控制中,评价控制算法优劣的主要依据为视频码率,但应用视频码率的同时,还需要对视频质量进行控制,所以需要引入一个质量控制模块。
1.3.1 视频采集
视频采集依靠采集程序与计算机内置的采集卡完成。档次高的采集卡对应生成高质量视频。某些视频采集卡可以执行硬压缩,采集速度很快。尽量应用高质量的采集卡进行视频的捕捉,保证图像效果较好。针对某些可以执行压缩的采集卡,采集成AVI格式视频具有较好效果。进行采集时,可利用随卡带的采集程序,亦可运用Premiere的采集程序。借助Premiere的cuptu:命令采集时,需要在模拟信号与DV信号中区分出视频信号源,在cupture format采集格式中选取composite(模拟复合)或者是DV(数字视频)。条件允许的情况下,首选DV格式采集。
1.3.2 视频编辑
视频作品质量的提高是视频媒体编辑的重要过程,借助对采集压缩后的视频素材执行编辑操作,让视频感染力、表现力增强。编辑过程为:将编辑程序打开,新建视频编辑项目,把数字化的视频素材传输进此项目窗口,对素材进行选择,设置素材在编辑轨上的展开方式,之后调用编辑软件供给的各个软件,比如剪辑、重新排序、衔接素材、添加特效、运动叠加、中英文字幕等。
视频节目编辑成功之后,可以直接压缩成为所需格式,图像信息的损失有效降低,清晰度提高了。使用素材时,最好保持图像的原始尺寸与宽高比。视频片段加入滤镜效果时,需要进行选择,原因是某些滤镜效果会使原视频劣质化,清晰度显著降低,可以决定少加甚至是不加。此外,不超过视频的目标任务的情况下,力求视频压缩的比特率得到提高,图像细节的损失减少。
1.4 主动跳帧控制
对于解码器,如果在编码端存在跳帧控制,则解码端将重复前一帧图像的内容,使解码后的重构视频序列满足指定的帧速率。或者可以使用之前编码帧的重建帧,计算通过帧的峰值信噪比。如果第j帧被跳过(事实上,没有跳过帧),则使用前一重建帧的第j-1帧。如果峰值信噪很小,则说明跳过当前帧并没有显著降低PSNR,即可得到视频质量没有显著变化,能够作为跳帧控制策略。与一般的跳帧相比,即可作为主动跳帧控件。如果该帧满足主动跳帧的要求,则会生成两种效果:首先是未对帧进行编码,保存一些码字,降低模式判断和运动估计,并减少计算量;其次,缓冲区空间被空出,缓冲区充盈度的减小,将造成控制器无法准确调整后续帧的量化参数。
2 实验分析
为了验证基于CPLD芯片的视频图像码率控制方法的有效性,对标准测试序列(共100帧)进行测试分析,并与小波视频码率控制方法相比较。测试序列为QCIF格式,帧频率为20 f/s,以50 kb/s速率进行编码,缓冲器容量为3 500 bit。
在视频图像细节简单情况下,分析不同控制方法下缓冲器所占用量对比分析,结果如图4所示。
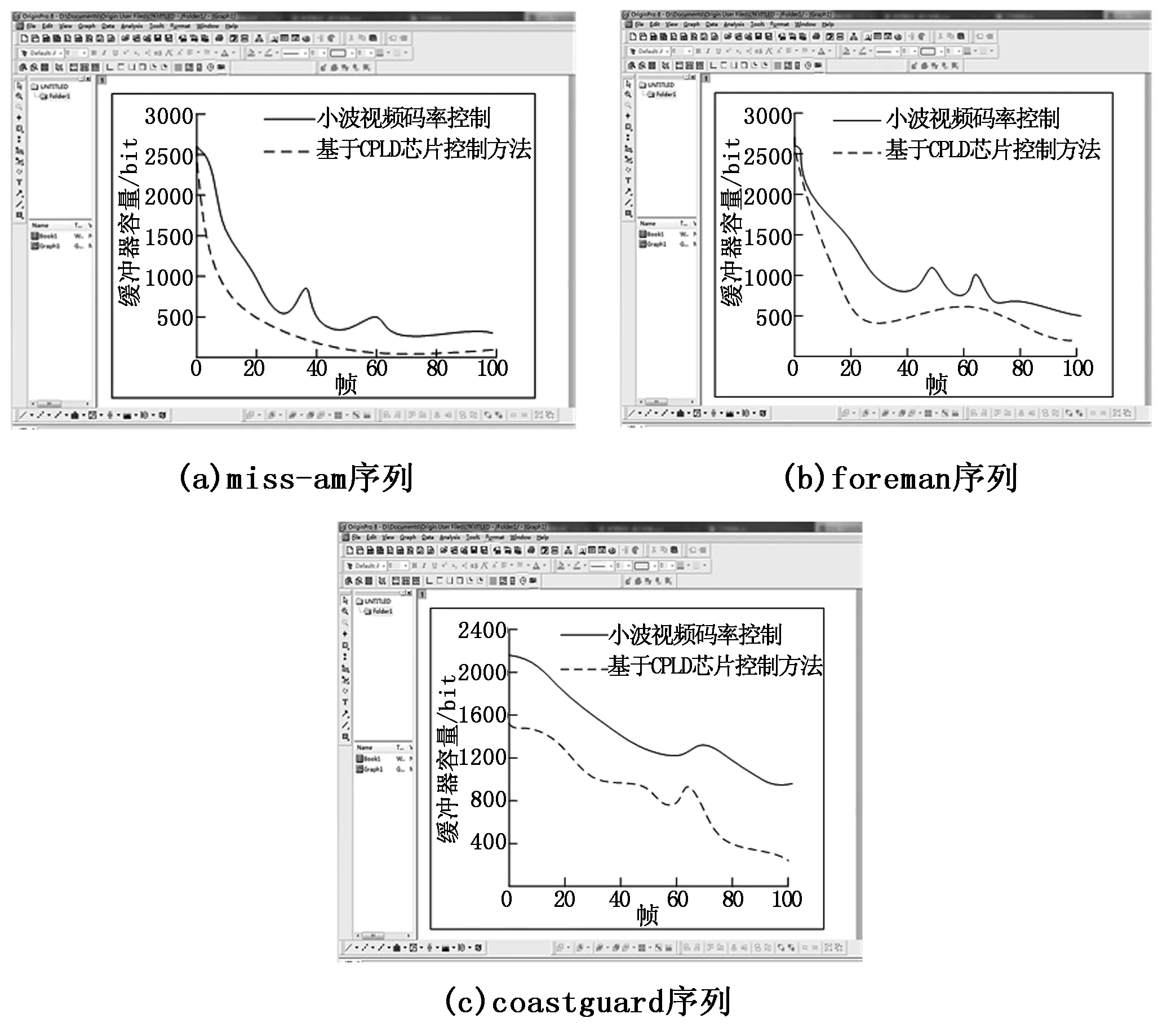
图4 不同控制方法下缓冲器所占用量对比分析
由图4可知,采用小波视频码率控制方法在视频图像变化时,缓冲器占用量较大,而采用基于CPLD芯片视频图像码率控制方法缓冲器占用量相对较小。
在视频图像细节丰富情况下,需将视觉图像质量一致性以帧内失真度均方误差作为度量准则,该误差计算公式为:
(3)
式中,M表示视频图像数量;S′表示重建图像与原图像之间的均方误差;S越小,失真度就越集中,视频图像也就越清晰。
在miss-am序列、foreman序列、coastguard序列下,将两种方法的失真度均方误差进行对比分析,结果如图5所示。
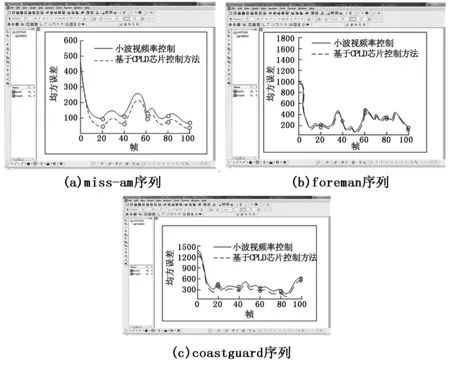
图5 两种方法的失真度方差对比分析
由图5可知:在miss-am序列下,采用小波视频码率控制方法在帧数为40~60帧时,均方误差达到最高为180;而基于CPLD芯片控制方法在该帧数范围内,均方误差达到最高为270。在foreman序列下,采用小波视频码率控制方法在帧数为60帧时,均方误差达到最高为520;而基于CPLD芯片控制方法也在60帧时,均方误差达到最高为510。在coastguard序列下,采用小波视频码率控制方法在帧数为100帧时,均方误差达到最高为800;而基于CPLD芯片控制方法也在100帧时,均方误差达到最高为790。由此可知,采用基于CPLD芯片控制方法失真度较小,获取的视频图像更加清晰。
基于上述内容,统计实际峰值信噪比PSNR_Y、PSNR_U、PSNR_V和输出码率大小,如表1所示。
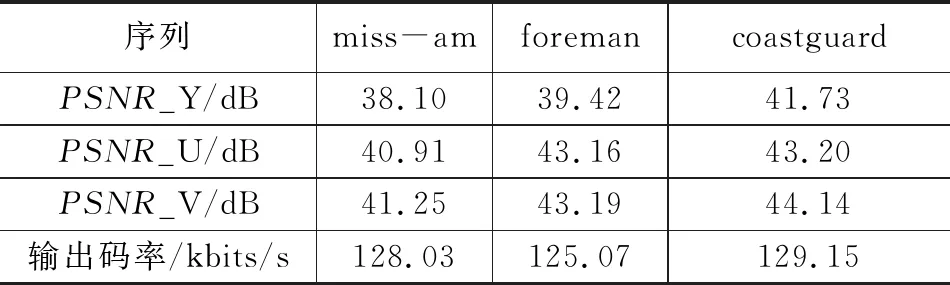
表1 实际峰值信噪比输出码率大小分析
依据表1所示实际值,分别采用小波视频码率控制方法(A)和基于CPLD芯片控制方法(B)对码率控制精准度进行对比分析,结果如表2所示。
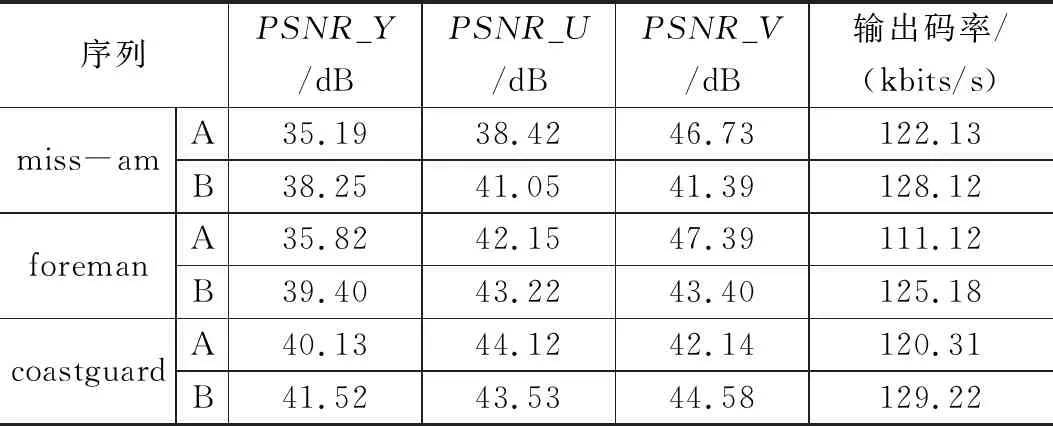
表2 两种方法码率控制精准度对比分析
PSNR_Y/dB峰值信噪比:采用小波视频码率控制方法在miss-am序列下与实际值相差2.91,在foreman序列下与实际值相差5.09,在coastguard序列下与实际值相差1.12;采用基于CPLD芯片控制方法在miss-am序列下与实际值相差0.15,在foreman序列下与实际值相差1.51,在coastguard序列下与实际值相差0.27。
PSNR_U/dB峰值信噪比:采用小波视频码率控制方法在miss-am序列下与实际值相差2.94,在foreman序列下与实际值相差1.01,在coastguard序列下与实际值相差0.93;采用基于CPLD芯片控制方法在miss-am序列下与实际值相差0.14,在foreman序列下与实际值相差0.06,在coastguard序列下与实际值相差0.33。
PSNR_V/dB峰值信噪比:采用小波视频码率控制方法在miss-am序列下与实际值相差5.48,在foreman序列下与实际值相差4.2,在coastguard序列下与实际值相差2;采用基于CPLD芯片控制方法在miss-am序列下与实际值相差0.15,在foreman序列下与实际值相差1.51,在coastguard序列下与实际值相差0.27。
输出码率:采用小波视频码率控制方法在miss-am序列下与实际值相差5.9,在foreman序列下与实际值相差13.95,在coastguard序列下与实际值相差8.84;采用基于CPLD芯片控制方法在miss-am序列下与实际值相差0.09,在foreman序列下与实际值相差0.11,在coastguard序列下与实际值相差0.07。
综上所述:以CPLD芯片为基础的视频图像码率控制策略最小控制误差为0.07,由此也证实基于CPLD芯片的视频图像码率控制方法的有效性。
3 结束语
文中提出以CPLD芯片为基础的视频图像码率控制策略,带宽约束满足情况下,在一帧图像范围内对每个宏块量化参数的方差进行最小化处理,此准则能够均匀图像质量。与此同时,节省编码码流中应用于表征宏块量化参数变化的句法比特数,该方法是优化了小波视频码率控制方法的一致性,能够使编码图像质量均匀性提高,低码率的视频应用中应用性增强。
实验显示,此方法满足了高精度输出码率标准,并且同JVT-G012相比重建视频质量更优,是有效的码率控制策略之一。然而,针对运动量较大的序列,该文的码率控制方案同JVT-G012相比较并不具有什么优势,这也成为一个值得今后深入思考,研究的问题之一。
