浅析专用汽车自动驾驶的整车评价测试方向
2020-06-28中汽研检测中心武汉有限公司邵骏何子燚
中汽研检测中心(武汉)有限公司 邵骏 何子燚
随着人民生活水平的不断提高,购买汽车的人也越来越多,随之而来的交通拥堵、道路安全及环境污染等系列问题日益严峻,自动驾驶汽车是解决上述社会问题的关键技术手段之一。自动驾驶汽车的测试承担着智能化、网联化等技术以及云、管、端多方面的技术研究和产品开发,对技术迭代、功能安全性的验证、应用示范,以及未来产品标准、法规、监管等方面的探索具有重要意义。
自动驾驶在专用车领域的应用
自动驾驶在专用车领域的应用越来越广泛,自动驾驶已经成为专用车领域发展的必然趋势。自动驾驶专用车在减少事故发生率、提高道路及汽车运输效率等方面有着巨大优势。
受法律法规、道路环境复杂性的影响,目前封闭环境及点对点运输等场景更适合自动驾驶汽车的应用。以下列举几种应用场景。
1、港口:港口环境相对封闭且基本处于24h运转,工作强度较大,沿海环境恶劣,集装箱装卸存在安全隐患等问题,最为适合发展自动驾驶汽车。如已建成的洋山港四期,已成为全球最大的自动化码头。
2、城市清洁:城市清洁车辆行驶路线相对固定,行驶速度慢,而且大多数是在凌晨时进行,道路环境相对简单。
3、矿区:矿山环境恶劣,工作内容单一,路线固定,危险性高,而且矿山车辆比较特殊,对驾驶员要求较高。
4、高速公路物流:中长高速运输存在时间长、距离长等特点,驾驶员容易疲劳。如果在运输车队中实现自动编队行驶,将节省大量燃油。而且物流车辆可以实现全天运行,大大提高物流效率。
自动驾驶汽车发展的几个阶段
2014年,SAE International(国际汽车工程师协会)制订了一套自动驾驶汽车分级标准,SAE将自动驾驶技术分为L0~L5共六个等级(见表1)。L0代表没有自动驾驶加入的传统人类驾驶,L1~L5则随自动驾驶的成熟程度进行了分级。
自动驾驶汽车的测试内容
1.基础性能测试
自动驾驶汽车也是汽车,必须具备正常的前进、转弯、后退等驾驶功能。另外,需重点测试自动驾驶汽车的响应时间、运行效率等指标,如对障碍物的识别时间、刹车的反应时间、通过路口的效率、转弯时的路线选择等,目前我国已出台《智能网联汽车自动驾驶功能测试规程》(表2)统一了测试场景、测试规程及通过条件。
2.功能缺陷测试
自动驾驶汽车功能缺陷指的是,在整车及系统部件不存在故障的情况下,由于复杂环境对传感器的影响,导致系统做出错误判断并执行错误的操作的缺陷,在此搜集梳理出自动驾驶汽车传感器以下几个缺点:
a.毫米波雷达对静止目标物以及区分目标物存在分辨问题;
b.机器视觉存在恶劣天气光照干扰及探测目标的位置和速度精度问题;
c.V2X通信存在丢包、延迟、可靠性以及高密度建筑物干扰等问题;
d.激光雷达存在探测距离小,恶劣天气干扰等问题;
e.高精度定位系统存在受隧道、天气、高密度建筑物干扰问题;
而且自动驾驶系统的一些工况通过人类历史事故库获得是不可靠的,需要构建自动驾驶的实际道路测试获得独特危险场景数据库,才能从根本上解决自动驾驶安全问题。
3.信息安全测试
2017年上映的影片《速度与激情8》中有这么一个片段:“黑客”通过网络接管了指定区域所有汽车的控制权,通过程序为车辆设定驾驶方式,在街道上出现了“万马奔腾”的壮观场景。

表1 自动驾驶汽车分级标准
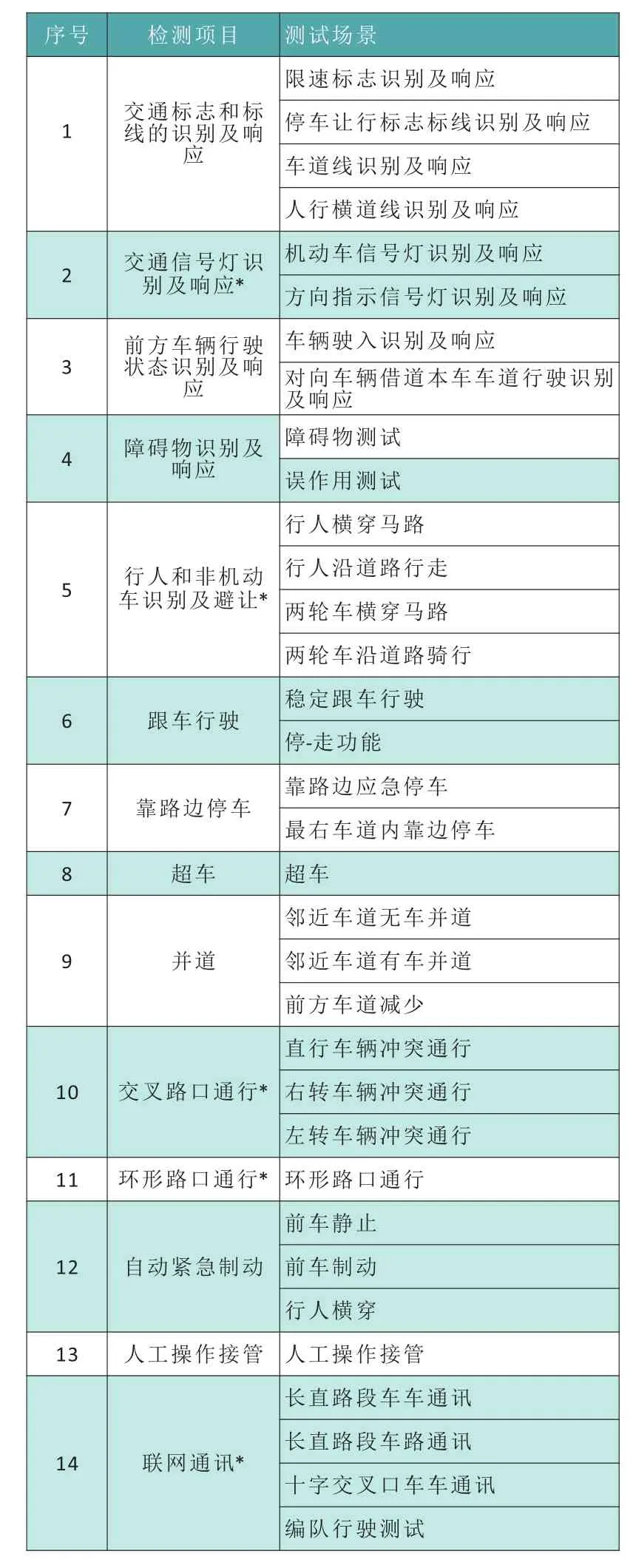
表2 智能网联汽车自动驾驶功能检测项目及测试场景
自动驾驶汽车的网络结构主要由车内网、车云网、车际网构成,主要产生安全威胁的有ECU和控制系统的安全、车与云端的数据传输安全、嵌入式安全、传感器安全、无线安全、人工智能算法安全等。因此不仅要对车辆本身安全性进行测试,还要重点关注车辆与外界通信时的网络安全风险,以及当被攻击后及时响应与处理能力。
4.决策能力测试
从目前的技术发展情况来看,自动驾驶汽车的决策能力还存在明显的不足,决策能力决定了自动驾驶汽车是否能真正实现智能化、人类能否相信自动驾驶技术可靠性的绝对基础。
自动驾驶汽车决策能力的测试往往需要通过大量数据的收集,建立完善的场景数据库,目前比较有效的方法是基于实车在环(VIL)的驾驶辅助系统测试。VIL是指将ADAS系统集成到真实车辆中,并通过实时仿真机及仿真软件模拟道路、交通场景以及传感器信号,从而构成完整测试环境的方法,可实现ADAS功能验证、各场景仿真测试、与整车相关电控系统的匹配及集成测试。与传统的硬件在环(HIL)测试相比,VIL由于用真实车辆替代了车辆模型,从而很大程度上提高了被测控制器性能测试结果的精确度;与实车测试相比,由于将实现复杂且难以复现的交通场景用仿真的方式来实现,可以快速地建立各种测试工况。
5.交通融洽
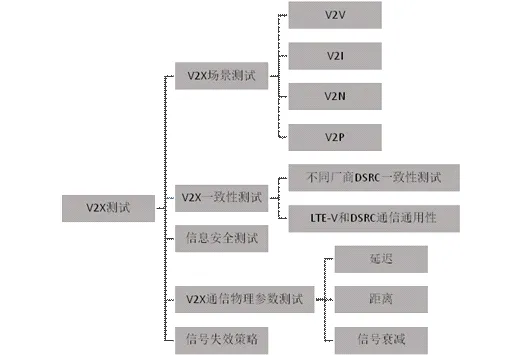
未来自动驾驶汽车必定摒弃堆叠传感器的技术路线,从而转向车路协同的技术路线,在此技术路线下,汽车将与城市道路系统、信号系统、车与车、车与人、车与云端等进行互联,实现信息实时共享。此时将需要高带宽、超低延迟、高可靠性的通信技术(V2X)支撑,基于通信技术能力的测试也至关重要。
V2X测试主要包括四类场景,分别为汽车与汽车(V2V)、汽车与网络(V2N)、汽车与基础设施(V2I)、汽车与行人(V2P)。V2X测试一般会经过通信设备厂商和汽车主机厂商的测试,主机厂将搭载车载单元(OBU)的汽车和测试区装有路侧单元的通信模块(RSU)进行多种场景下通信测试,以验证V2X应用的功能和性能。由于各种测试安全尚未得到认可,所以大量试验验证需要在封闭测试区进行,搭建各种V2X测试场景的需求是封闭区建设的重点之一。
结语
随着现代科技的进步,在自动驾驶的一些关键难点也会随之解决。而由于场景限制商用车自动驾驶必定先于乘用车落地。现阶段国家大力推行5G建设从另一方面加速了自动驾驶汽车的相关研究。自动驾驶测试对于验证自动驾驶汽车在道路上行驶时是否安全至关重要。