一种数据中心巡检机器人的设计
2020-06-27杨曹
摘 要:近年来,随着云计算、大数据等技术的崛起,数据中心得到蓬勃发展,数据中心大规模兴建与运营,数据系统对IT设备的依赖程度大幅增加,机房设备数量随之提高,导致与之配套的运维业务量巨增,如何可靠运营一个庞大的数据中心成为了企业面临的巨大挑战。为此,设计了一种数据中心巡检机器人,能够弥补数据中心运维工作的不足,可安全、高效地完成巡检工作,提升数据中心运维的可靠性,对数据中心未来的发展具有重要意义。
关键词:数据中心;巡检机器人;深度学习算法
0 引言
在数据中心建设大力发展的今天,数据中心已经成为各个领域必不可少的基础设施。目前国内数据中心机房均采用7×24 h专人值守模式,工作人员需按时巡检机房的各类设备状态和数据指数,采用轮班值守的方式,人工进行排查式巡检,工作效率不高。同时,由于机房设备数量大、类型多,需要巡检人员具备相当的专业知识背景,但现有配置人员能力远远不能满足实际发展需要,基于此,引入智能巡检机器人具有重要意义,借助其先进的深度学习算法和机器视觉等相关技术,机器人巡检可以完美替代传统的人工巡检方式,以满足数据中心的快速发展需求。
1 巡检机器人设计需求
数据中心巡检机器人的设计需要满足巡检工作需求。首先,每台数据中心巡检机器人可以对500~1 000 m2的机房进行全天不间断巡检,每天进行4次巡检,每次间隔6 h,并在每次巡检结束时提供相对应的巡检报告、分析报告等。在巡检过程中,要求巡检机器人可以精确识别机房设备故障、机房环境状态异常,主要的工作环境为数据中心的配电机房、冷却机房、IT数据机房,主要识别目标为配电柜仪表、指示灯、IT设备LED故障灯、配电柜和空调显示屏亮起的指示数据、柴发机组温度状态等,主要识别数据中心机房的异响、异味、异温,同时可以实时收集机房内部的环境温度生成三维温湿度云图。
2 数据中心巡检机器人的设计
2.1 本体设计
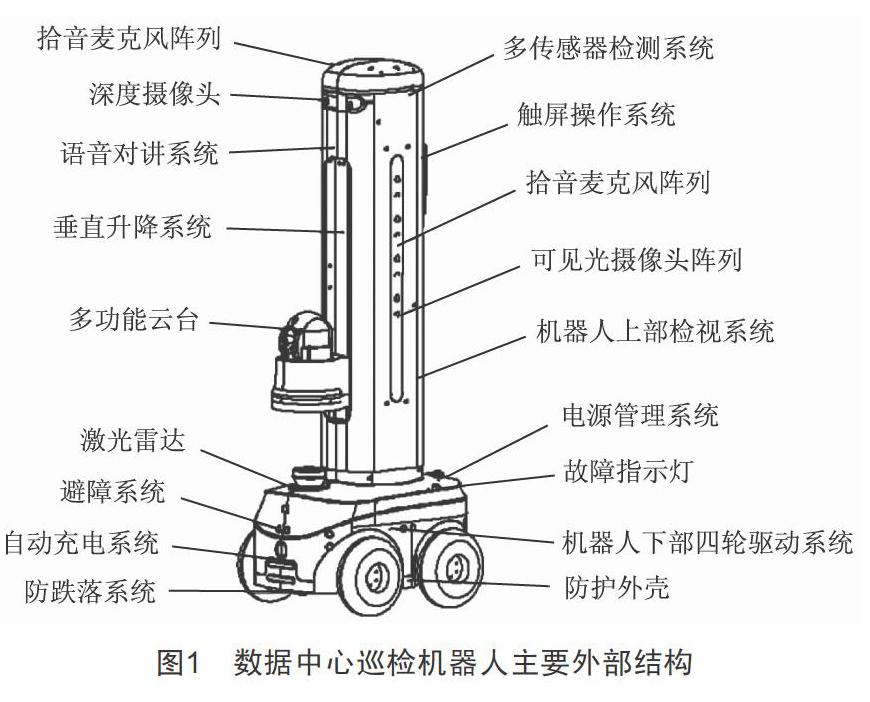
根据数据中心环境设计机器人本体,数据中心巡检机器人整机重量约为80 kg,整机高度为1.5 m,金属本体,塑料外壳,外壳采取必要的防静电处理,均不允许带电。机器人本体由上下两部分组成,上部为类圆柱形结构,下部为通用移动小车结构,两部分通过结构件连接,连接部分采用快速可拆卸式设计,同时通过航空插头进行电气快速连接,此种分体式设计可根据不同数据中心机房的需要更换不同的检测模塊。数据中心巡检机器人主要外部结构如图1所示。
其中机器人上部分为巡检部分,用来实现检视功能,主要配备:拾音麦克风阵列;多传感器检测系统;深度摄像头;触屏操作系统;语音对讲系统;垂直升降系统;可见光摄像头阵列;多自由度可见光红外多功能云台系统;机器人上位机控制系统等。
下部为机器人移动平台部分,用来实现运动功能,主要配备:机器人运动系统;激光雷达导航系统;电源管理系统;避障系统;故障指示系统;自动充电系统;防跌落防碰撞系统;无线通信系统等。
2.2 主要性能
数据中心巡检机器人涉及的技术标准有严格要求,在性能方面机器人移动平台需要具备基本的运动功能,这样才能满足不同方面的需求,比如直行、转弯等。在水平地面上的最大速度应控制在1 m/s;采用四轮驱动,利用差速驱动机器人实现无半径转弯;具备爬坡能力,需要控制在10°以下;具备越障能力,最小越障高度为5 cm;具备防跌落能力,高度应控制在10 cm;同时要求机器人在极限运动速度下,保证最小的制动距离在0.5 m以下;激光雷达的定位精度要求在±15 mm;机器人防碰撞用传感器距离设计应不超过0.5 m。巡检机器人上部需具备垂直方向的托盘升降能力,可以垂直升降云台等检测设备,抬升重量设计为5 kg以上,整个抬升行程约0.5 m,可实现的最大速度为0.5 m/s。同时,机器人云台部分选配的可见光摄像头分辨率不得小于高清1 080 dpi,最小光学变焦倍数为20倍,红外测温精度控制在2%左右。
2.3 主要功能
数据中心巡检机器人的功能主要有:
(1)机器人要具备定位导航功能,借助装配的高精度激光雷达,可以实现自主定位、自主导航、自建地图、智能规划最优路径到机房任意点等相关功能,同时利用地图和雷达达到高精度定位目的,满足巡检过程中定位机柜的需求。
(2)机器人可以通过激光扫描和避障系统对障碍物进行智能识别,实现自主避障或绕障功能,过程中可防跌落防碰撞,并实时规划新路线等。一旦发生碰撞,机器人会及时停止并报警,防止事故的发生。
(3)机器人需要具备自主充电功能,当机器人的电量低于20%时,将自动规划最优路线返回充电点并自动连接充电桩进行充电。整机充电续航时间不小于6 h,单次充电充满时间不大于3 h。
(4)机器人具备图像识别检视功能,通过机器视觉能快速准确识别数据机房的配电柜仪表读数、指示灯的指示状态、IT设备LED故障灯状态、配电柜和空调显示屏亮起的指示数据等,并在识别的同时和数据库中的标准数据进行参考对比,及时发现异常现象。
(5)机器人具备环境采集和管理功能,通过多路传感器可以收集数据机房的温度、湿度、噪声、异味等信息,同时利用红外检测功能实现精确测温、自动生成三维温湿度云图等。
(6)机器人具备告警功能,在巡检过程中当机器人检测到故障信息后,第一时间将告警信息通过机器人的通信系统反馈给控制台并生成告警日志。
(7)巡检机器人需具备AI深度学习算法,通过机器人的不断学习,不仅可以提高识别准确率,还可以对故障进行分析、预测、诊断等,大幅度提升机房安全巡检的可靠性。
(8)巡检机器人还需要具备相应的后台管理功能,包括节能管理、日常巡检任务管理、智能调度等,同时提供丰富的数据接口给第三方应用,并且可以接入数据中心的动环系统,实现机房信息的实时共享。
3 结语
现阶段智能机器人已经被运用于多种领域,极大地便利了人们的生活,解放了人们的双手,有效提升了生产效率。为了确保数据中心更加安全可靠的运行,实现无人值守的目的,大规模使用巡检机器人已成为必然趋势,其可以代替工作人员完成日常巡检工作,依照既定的巡检程序落实相应的巡检任务,大幅减少人工巡检带来的错检、漏检等相关问题,从而使巡检工作更加安全可靠,促进数据中心的高效运营。
[参考文献]
[1] 唐亮,陈瑞华,王长宁.用于数据中心机房的智能巡检机器人的设计[J].计算机与网络,2018,44(6):47.
[2] 孙显鹤,郭小凯.室内变电站设备巡检机器人关键技术研究与应用[J].机电信息,2018(27):100-101.
[3] 赛炜,孙忠涵.基于激光雷达的机器人智能导航系统研究[J].激光杂志,2019,40(11):182-186.
[4] 黄嘉东,陈海平.数据中心机房的智能巡检机器人设计及应用[J].计算机与网络,2017,43(22):46-47.
收稿日期:2019-12-27
作者简介:杨曹(1984—),男,江苏南京人,工程师,研究方向:机电一体化。
