民用飞机襟翼电子控制装置需求及控制仿真
2020-06-27韩赛孙军帅化东胜
韩赛,孙军帅,化东胜
(1.中航西飞民用飞机有限责任公司 工程技术中心, 西安 710089)(2.航空工业庆安集团有限公司 航空设备研究所, 西安 710077)
0 引 言
襟翼系统是大型民用飞机及支线民用飞机的关键分系统之一,对飞机的性能和安全性有重要影响[1],不仅能有效提高飞机起飞及着陆时的升力,有效改善飞机的失速条件,而且也大大改善飞机爬升率、进场速率及进场最佳飞行姿态[2]。襟翼系统可以实现缝翼和襟翼的收放运动,缝翼系统和襟翼系统的工作原理一样,本文仅针对襟翼系统进行研究。
襟翼系统由5个部分组成:监测系统、动力驱动系统、动力传输系统、扭矩增益系统、故障保护系统。监测系统用于控制和监测系统工作状态,实现系统闭环控制[3],由襟翼操纵手柄(FCL)、襟翼电子控制装置(FECU)、襟翼位置传感器(FPSU)、襟翼马达控制模块(FMCM)、襟翼动力驱动装置(FPDU)中的转速测量传感器组成;动力驱动系统提供襟翼运动动力源,包含襟翼动力驱动装置(FPDU);动力传输系统由扭力管组件、支撑轴承、角齿轮箱;扭矩增益系统实现大的输出扭矩,主要由齿轮箱组成;故障保护系统用于当系统出现故障时保护系统的完好性,包括翼尖刹车装置、力矩限制器和马达离合器。其中FECU是襟翼系统的核心。
以往的襟翼系统研究主要为襟翼运动机构的形式及强度分析[4-5]、系统余度管理[6]、计算机容错技术研究[7]、襟翼自动保护控制律设计[8]等,未针对民用飞机的研制应遵循的SAE ARP4754A标准进行研究,民用飞机研制应采用“双V”研发流程,从需求的角度出发进行自上而下的需求捕获、需求确认、需求验证、构型管理、过程保证等活动。需求在系统的开发中至关重要,正确、完整的需求可以减少系统开发的迭代次数,减少系统的开发成本超支和进度延期[9]。
本文针对襟翼系统的顶层需求,从需求捕获和系统设计的角度分析研究控制襟翼运动的FECU,并对其进行仿真验证。
1 系统级需求
1.1 功能需求
襟翼电子控制装置应具有以下功能需求:
(1) 控制襟翼收/放[10];
(2) 襟翼系统监控(通过PBIT和CBIT监控系统);
(3) 襟翼系统保护(系统控制失效保护、不对称保护、非指令保护、过载保护、超速保护);
(4) 向航电发送襟翼系统状态及襟翼位置信息;
(5) 支持中央维护系统(CMS)进行机上维护。
1.2 性能需求
(1) 控制需求
当使用FCL控制时,襟翼系统采用分档控制,应能放下或收起襟翼至四个位置:0°、17°、23°和35°。
当飞机在巡航构型时襟翼位置精度为0°~0.5°,其他构型时襟翼位置控制精度为±0.5°。
(2) 工作时间和公差
正常状态下,襟翼完全收放时间为(19±1) s。
(3) 工作模式
襟翼系统工作模式应包含正常工作模式、半速工作模式、故障模式和维护模式。
1.3 电气接口需求
数字电气接口:系统内部和外部串行通信总线应满足CAN或ARINC429总线的要求。
离散电气接口:离散电信号为模拟或二进制数字信号。导线集包含所有必需的传送离散信号的导线。
电气系统接口:电源系统应提供系统所有用电设备(FCL、FECU、FMCM、FPDU)的电源,包括28 V直流和115 V交流电源。
航电系统接口:襟翼系统应向航电系统的DMC发送确认的襟翼位置指令、襟翼位置、系统状态、系统故障等信息,同时接收校准空速、轮载等信息。
中央维护系统接口:FECU应能通过BIT检测系统设备内部故障、存储故障并上报中央维护系统,应能通过中央维护系统实现电气调零。
主飞控系统接口:FECU应向主飞控系统发送襟翼位置状态离散信号。
起落架控制系统接口:FECU应能接收起落架收放控制系统提供的硬线轮载信息。
1.4 其他需求
襟翼系统应符合CCAR-25的适航条款需求、DO-160G的环境需求、RTCA DO-178C机载软件的研制要求、SAE ARP4761和SAE ARP4754A的安全性要求、四性(可靠性、维修性、测试性、支援性)要求等。
2 襟翼系统架构
针对以上控制部分的需求,形成如下襟翼系统方案:通过电信号控制、机电驱动、机械作动的形式,采用襟翼电子控制装置×2+襟翼马达控制模块×2+襟翼动力驱动装置+滚珠丝杠作动器×8的体系架构,内襟翼和外襟翼均由两个滚珠丝杠作动器驱动,架构图如图1所示。

图1 襟翼系统架构
襟翼系统的工作原理:飞行员通过FCL或襟翼超控开关(FOS)发出襟翼的目标位置指令,襟翼电子控制装置(FECU)将收到的手柄电气信号转换为FECU的目标指令位置;同时FECU结合航电系统发送给襟翼系统的空速、轮载、维护请求指令等交联信号以及系统内部的当前FPSU的信号,综合判断后将指令发送给FMCM,FMCM经解算后发送马达控制指令给FPDU中的马达;两个马达通过齿轮组构成的行星减速器实现大扭矩、低转速的输出扭矩,再通过由扭力管和万向节组成的扭力管组件后将扭矩输入到作动器输入端,襟翼滚珠丝杠作动器(FBSA)将扭力管(UJ)输入的扭矩再次减速后传递到丝杠运动副,丝杠运动副将旋转运动转化为丝杠螺母的直线运动;最终通过与丝杠螺母连接的襟翼摇臂实现襟翼的收起、下放运动。当襟翼运动到指令位置或出现失效时,系统通过断电刹车装置(POB)和翼尖刹车装置(WTB)将襟翼把持在当前位置。
襟翼控制计算机机箱内包含命令通道和监控通道两个功能通道.襟缝翼控制计算机采用同步工作方式,通道分别采集传感器信息,通道间通过专用交叉通信数据链路(CCDL)实现数据共享[7]。襟翼系统以襟翼构型控制为主,不需要依据飞行条件和飞机状态进行调参,控制相对简单,但系统的状态繁多,逻辑控制和转换异常复杂[2]。襟翼系统需采用双通道架构。在正常模式下,双通道驱动襟翼;当出现任一通道失效,系统进入降级工作模式,单通道驱动襟翼,收放速度减半;当系统的双通道都丧失驱动襟翼的能力,系统将处于无法工作模式。
3 襟翼运动控制逻辑
3.1 模块设计
为符合“控制襟翼收/放”和“襟翼系统监控(通过PBIT和CBIT监控系统)”需求,FECU应设计不同的功能子部件满足需求衍生的子功能,一般FECU包含I/O模块、控制通道模块及监控通道模块。I/O模块需完成接口信号处理,即提供指令通道和监控通道对交联设备的输入输出信号和非易失性存储资源的访问。控制通道模块需完成控制襟翼收放的指令下发功能及上报系统状态,即根据FCL、FOS和FPSU数据通过向FMCM和WTB发送指令来控制襟翼位置并通过A429上报和模拟输出,存储所有来自FECU部件确认的故障并建立传输到CMS的故障报告,控制维护BIT的执行。监控通道模块需完成系统监控功能,即对系统进行监控并对故障进行制裁(重置或激活POB和WTB),监控FECU和襟翼系统的状态,提供给I/O模块以进行综合,并上报给机组人员以警示。
从安全性的角度考虑,应避免共模故障导致系统失效,因此需采用非相似设计,一般控制通道模块采用软件(CPU)实现,监控通道采用硬件(FPGA或PLD等)实现。二者控制算法相同,物理实现方式不同。本文对控制通道模块(COM CPU)进行详细设计以符合上述相关需求。
3.2 控制通道逻辑
COM CPU通道为符合“控制襟翼收/放”需求,需进行信号处理、控制律解算、系统状态监控、系统保护、系统管理等子功能的划分,现将COM CPU分为以下5个功能模块:
(1) 上电自检测及持续BIT子模块
该模块将I/O模块传递的的数字信号进行检测并持续性监控,判断FCL、FOS、FPSU、WTB、FMCM及FPDU的健康状态;Simulink模型中对输入信号的有效性进行综合判断,得出交联设备的健康状态。
(2) FECU模式管理子模块
为了使系统能够更好、更安全、可靠地运行,基于Matlab/Simulink设计了各个工作模式之间的转换条件,实现了工作模式的管理,FECU工作模式包括初始化模式、正常模式、故障模式、离线模式、维护模式[11],模式之间的转换条件如图2所示。本文用Simulink的Stateflow模块进行FECU的模式转换的仿真,依据输入信号选择FECU的工作模式,作为控制襟翼收放的前提。

图2 FECU模式转换条件
(3) 襟翼位置指令综合子模块
FCL和FOS输出的电压信号经I/O模块处理后传送到COM CPU为数字信号,该模块根据输入信号的值判断FCL或FOS的档位位置,综合FCL和FOS的健康状态得出二者确定的指令位置。
(4) 襟翼位置控制子模块
该模块是整个控制系统的核心。当各个部件均正常工作,该模块先根据系统可接受的档位和FECU的工作模式计算出系统需求的襟翼指令位置,且依据FPSU旋转变压器的电压与襟翼角度的对应比例解算出当前的襟翼位置,对指令位置和当前襟翼位置的差值进行闭环控制,位置的闭环控制通过控制FPDU的电机转速实现。
系统正常刹车时,电机减速运动分为加速阶段、最大额定速度阶段、主减速阶段、最小额定速度阶段、减速阶段2,电机速度控制律如图3所示。
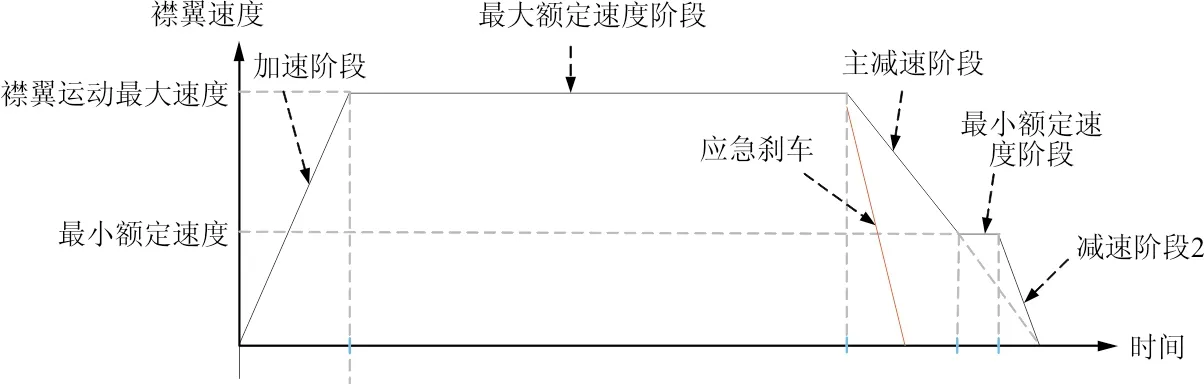
图3 FPDU电机速度控制律
控制律参数的设计依赖于整个作动系统的设计,某民用飞机的襟翼运动形式为铰链式,即襟翼通过与其相连的摇臂绕转轴上的铰链点作圆弧运动[4],依据性能要求——襟翼最大运动角度35°及对应FBSA的运动行程,结合FBSA的减速比,可得整个驱动线系的转动全行程转数:
=120.915 rev
当19 s作动时,假设系统匀加速时间和匀减速时间为2 s,传动轴的转速:

考虑到FPDU响应时间、实际减速时间等因素的影响,定义传动轴转速为:(430±20) rpm。
FPDU的控制律设计边界如下:
①FPDU的两个电机分别由两个FECU进行控制,传动轴到单个电机经过两级齿轮减速,总减速比为32.03∶1,整个FPDU减速比为16.015∶1,最大额定速度为:430×16.015=6 886 rpm;
②FPDU加速到最大速度的时间为2 s;
③加速度限制值:(±6 886 rpm-0)/2 s=±3 443 rpm/s;
④FPSU安装在FBSA4传动轴上,使用双余度的Resolver,Resolver工作角度为0°~360°,使用时最优工作区间10°~350°,即Resolver总行程为340°;FPSU减速前的角度偏差不妨定为20°;减速比为128.276∶1。
FPDU的马达速度控制律设计需要根据假设的速度变化起始位置容差选择最优的方案,选择时根据最小额定速度的运转角度变化的敏感性(敏感
因子K=最小额定速度/最大额定速度),依据主减速阶段与加速阶段的加速度绝对值相等,参数确定步骤如下:
①给定敏感因子K值;
②计算主减速阶段的时间及FPSU的变化角度;
③计算最小额定速度阶段开始时剩余的FPSU的角度;
④给定减速阶段2的位置,减速阶段2的总行程≈最小额定速度阶段总行程
⑤计算额定速度阶段及减速阶段2的运动时间。
使用软件Simulink中Stateflow模块仿真FPDU的不同阶段之间的转换逻辑,具体转换条件如图4所示,FPDU的马达速率控制律框图如图5所示。

图4 FPDU电机速度转换条件
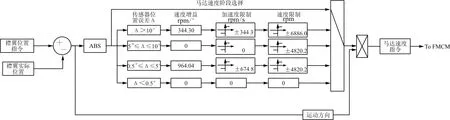
图5 马达速率控制框图
(5) 襟翼保护子模块(襟翼控制能力保护、超速保护、不对称保护、非指令保护)
当系统发生故障,满足系统保护的条件,FECU应发送紧急制动命令以触发POB和WTB,进而停止襟翼运动或保持襟翼在当前位置,目的是在系统发生故障时保护系统。保护条件为:
(a) 触发襟翼控制能力保护的情况
①丧失一个驱动通道:每个驱动通道中包括1个独立的FECU,1个FMCM,1个马达和制动器以及1个WTB通道、FCL、FOS和FPSU的传感器通道,当任一设备的健康状态为假,则丧失该通道的控制能力。
②丧失两个驱动通道。
③丧失襟翼位置指令(FCL和FOS均失效,即:FCL出现单个通道电压范围的真实性故障、两个通道之间的一致性故障、FCL出现机械卡阻故障、FOS双通道之间的一致性故障)。
④丧失襟翼位置(襟翼位置传感器失效,即传感器的接口故障、真实性故障、一致性故障、完整性故障)。
(b) 触发襟翼超速保护的情况
当空速超出载荷极限时,限制襟翼偏转或使襟翼向小偏度收回,以防止襟翼结构的损坏。FECU实现襟翼手柄的操纵指令和飞机飞行速度的比较,当飞行速度高于载荷门限时间[12],则满足襟翼超速的条件,FECU向航电发出CAS告警信息,提示飞行员应给飞机减速。
①襟翼位置超速:如果在襟翼伸出过程中检测到襟翼超空速条件,则将襟翼停止在下一档位。
②襟翼指令超速:当襟翼把持在指令襟翼位置时检测到襟翼超空速条件,则拒绝下放襟翼。
(c) 触发襟翼不对称保护的情况
如果所有FPSU的健康状态均正常,两侧FPSU信号差值超过襟翼最大不对称阈值或任一侧FPSU信号的变化率超过阈值[13],FECU发送指令停止动力驱动装置运动, 并发送信号POB 和WTB,将机翼锁定到当前位置;并向航电发出FLAP FAIL的告警信息[3]。
此外,FECU需将用于显示襟翼系统状态、指令及位置的信号、进行MBIT的信号传送航电系统,信号处理的逻辑驻留在FECU中。
3.3 Simulink仿真结果
在Simulink仿真模型中,用GUI建立了良好的襟翼系统操作界面(如图6所示),建立了S函数,实时并仿真了襟翼收起、放下的运动过程,手柄指令变化过程如表1所示,仿真结果如图7~图10所示。

图6 GUI界面
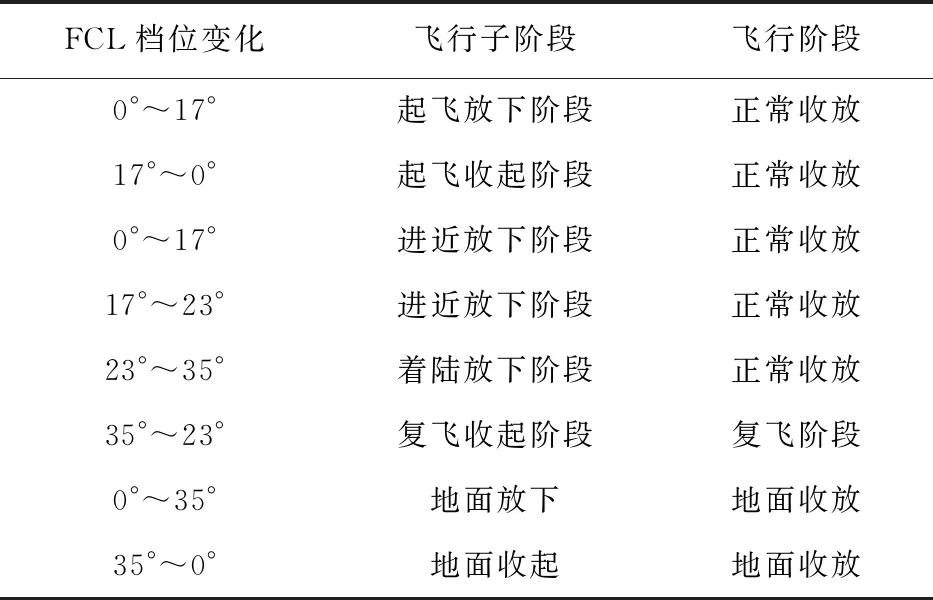
FCL档位变化飞行子阶段飞行阶段0°~17°起飞放下阶段正常收放17°~0°起飞收起阶段正常收放0°~17°进近放下阶段正常收放17°~23°进近放下阶段正常收放23°~35°着陆放下阶段正常收放35°~23°复飞收起阶段复飞阶段0°~35°地面放下地面收放35°~0°地面收起地面收放
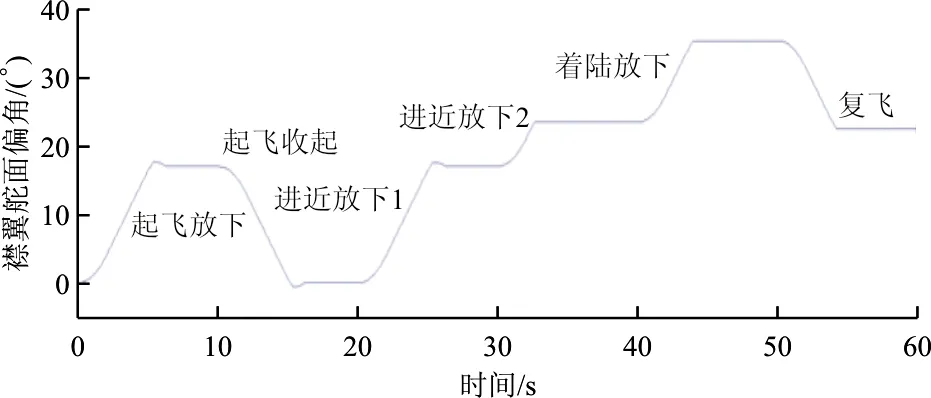
图7 襟翼正常收放和复飞
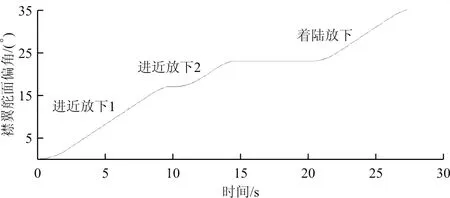
图8 半速下放襟翼
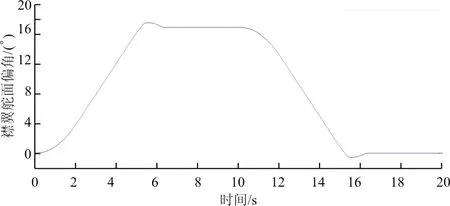
图9 地面收放襟翼
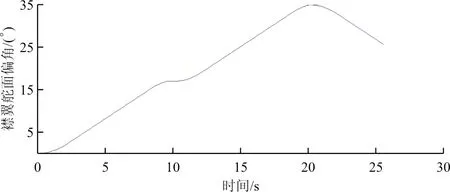
图10 S函数实时仿真过程中
从图7~图10可以看出:模型实现了飞行员操纵FCL的界面,能在要求的时间内收放襟翼到指令位置,以及实时仿真襟翼运动的过程。另外,FECU的指令控制回路会出现超调,稳态误差为0,实现了襟翼收放控制。出现超调是由于未加载电机及机械传动部件,后续将研究电机的速度及电流的闭环控制问题。
4 结 论
(1) 襟翼电子控制装置工作模式设计能够很好地实现逻辑转换,本文工作模式之间的约束条件合理。
(2) 本文所设计的襟翼收放时间能满足襟翼收放速度的性能需求,襟翼收放的控制律设计合理,马达的加速、匀速、减速阶段的控制律设计参数合理。