整体式智能爬架提升系统安全性研究
2020-06-26王远兵
王远兵
(中交四航局珠海工程有限公司,广东 珠海519000)
1 工程概况
中交南方总部基地建设工程位于广州市海珠区,与珠江后航道相邻。依据规划要求,总建筑面积约5.5×105m2,设置有A、B、C 3 区,并构成建筑群。项目建成后,将成为该区域的标志性建筑,有助于广州经济与旅游事业的发展。
2 验算内容
本方案按照使用工况和提升工况分别进行验算,验算的主要内容为附墙支座和提升挂座的螺栓受拉、受剪验算,以及与其接连的混凝土构件的承载力等。根据机位布置以及建筑结构情况,选取机位间距较大的24#机位验算,机位跨度5.5m。
本项目悬挑梁部位最不利机位跨度为5.5m,架体宽度为0.6m。
附着式升降脚手架对建筑结构的附着力是否满足建筑结构的设计要求主要分为2 部分计算,首先计算升降工况下对建筑结构的影响,作为附着式升降脚手架,最不利工况为升降工况提升荷载对建筑边梁的影响,由于使用工况一般有3 道附墙支座附着在建筑结构上,使用荷载由3 道附墙支座承担,分摊到3 层楼的结构上;而升降工况时,只有1 道提升挂座承担全部的提升荷载,由1 层建筑结构承担全部荷载,所以升降工况是最危险工况,现提供升降工况提升荷载,由技术总工进行复核计算。
根据JGJ 202—2010《建筑施工工具式脚手架安全技术规范》【1】4.1.5 条和4.1.8 条进行荷载组合。
按规范取:动力系数γb=1.05,冲击系数γc=2.0,恒载分项系数γa=1.2,活载分项系数γq=1.4。
根据设计布置,最大跨度L=5.5m(取整6.0m),前后立杆距离H=0.60m。
静载:P静=γa∑F静=1.2×24 731.8=29 679N。
升降荷载:P升=P静+300γaLH=29 679+300×1.2×6.0×0.60=30 975N。
3 整体提升式脚手架布置情况
钢桁架结构外立面附着DMCL 整体电动升降脚手架,后续均将其称为整体提升式脚手架。
立足于项目实际特点,仅对该脚手架采取立面围挡措施,并未设置具体的提升工况,省去了安装提升控制系统的麻烦。架体连接时,使用到斜拉杆、水平支座、置顶器,确保整体稳定性。整体提升式脚手架拉结示意图见图1。

图1 整体提升式脚手架拉结示意
水平拉杆和置顶器是重要的受力结构,可有效承受来自整体提升式脚手架的所有竖向荷载,而在水平拉结构件的作用下,可发挥出有效承受水平荷载的效果。
升降脚手架布置了48 个机位,分2 片进行升降,其中,第1片使用了28 个电动葫芦,第2 片使用了20 个电动葫芦,每个电动机额定功率0.5kW。
4 防火型全防护智能爬架平台的提升
4.1 动力提升系统
该系统包括提升挂座、穿墙螺栓、电动提升机、钢丝绳、钢丝绳过轮、上下承重梁。
4.2 提升原理
引入达蒙牌智能超欠载报警停机控制系统,在其支持下实现对爬架升降的灵活控制。该系统以中央电脑为核心,面向各机位做到实时监控,捕获的数据以即时传输的方式进入电脑,呈现出机位的实际运行状况。存在爬架体提升需求时,上钩挂在上承重梁横销上,下钩与传力钢丝绳钩接,横担、承重钢梁共同作用,形成稳定性较好的承力骨架【2】。提升作业时要求设备具有稳定性,因此利用穿墙螺栓将其固定,此构件可发挥出荷载传递的作用,即架体荷载能够被有效传入结构物。适配了环链电动葫芦,其是实现提升的核心设备,为主要动力源,可根据需求顺利完成提升作业。
4.3 附着导向和防坠卸荷系统
附着导向系统是实现升降的重要支持,沿架体高度方向设置导轨,增设3 套附墙件,在导轮组的作用下实现对导轨的有效约束,设置的导轮组与附墙支座共同作用,构成完整的导向装置,并利用穿墙螺栓实现与建筑的稳定连接。导轨与架体平台的运行机制相同,具有同步运动特点,此方式的优势在于有效避免架体发生倾斜。运行过程中,导轨在防坠挡杆等相关装置的作用下实现与附墙支座的稳定连接,并构成高效的荷载传递途径,可完成架体荷载的传递,使其有效到达附墙支座,再进一步传给结构物。附着导向系统见图2。
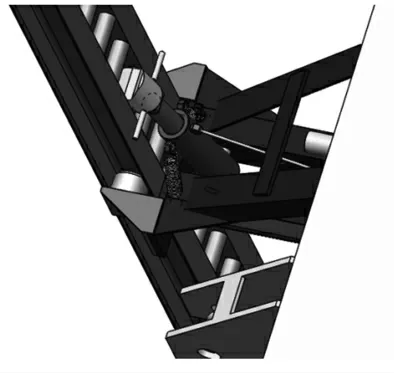
图2 附着导向系统效果图
防坠卸荷系统构成中,以可调式防坠卸荷限位支顶器尤为关键,该装置采取高强螺栓连接方式,能够被稳定铰接在附墙支座上。该装置顶部设置有V 型叉头,此部件支顶在防坠挡杆(安装在导轨处)上,遵循“顶头—调节螺杆—螺套—附墙支座”的连接顺序,在连接螺栓的作用下,可完成荷载向附墙支架的传递,并进一步通过穿墙螺栓进行传递,最终到达建筑物。
4.4 防护系统
防护系统的构成中,走道板被拼接为整体结构(采用螺栓连接的方式,使用到适量竖向龙骨);以实际防护需求为准,采取安装内挑板的方式有助于缩小架体与结构的间距,设置钢防护翻板,从而达到内封闭的效果。防护网连接至立杆的脱扣上,此部分为销轴连接,确定合适的防护网模数,以达到立面防护的效果。
4.5 防火型全防护智能爬架平台提升工艺流程
为避免盲目提升,在正式施工之前要做好技术交底,严格按照检查表中给出的内容依次完成架体各部分的检验工作,主管面向所有操作人员交代操作要点,划分为多个作业小组,有序完成如下操作:附墙支撑等相关装置的安装作业→全面检查(含升降机构、架体等与提升作业有关的部分)→检查钢丝绳,明确其所处位置→专业电工设置控制柜,接电缆线并试运行→拆除架体临时连墙杆→正式提升作业→至指定位置后根据实际情况调整吊点→设置拧紧支顶器→处理离墙间隙,使其封闭→顶部刚性拉结→全面验收。
5 JSJ-GL型爬架智能控制系统优点
基于JSJ-GL 型控制系统的应用,可发挥出计算机辅助集群控制技术的优势,具体做如下分析:
1)高度稳定的安全智能监控机制,以创造安全工作环境为基本目标,可实现对提升作业的全程监控,一旦出现异常可及时停机并发出警报。
2)完善的信号采集机制,配备了单一双绞屏蔽线,可实现与多个监测点的对接,并与电脑端连接,具备远距离传输、抗干扰的能力,全程稳定、可靠,省去了现场多点多线连接的烦琐环节。
3)可靠的控制线路布局形式,选择的是并行连接方式。相较于传统技术而言,分控线路工作异常的问题得到有效解决,控制信号可顺畅地传递至总控。各分控独立运行,对应有单独控制动作,内置的单片微型计算机能够感知工作状况,若发现机位异常则随即给出相应动作,产生的信号可完整地传给总控。通过机位集群控制的方式,提升了控制灵活性,具备更高的智能化水平【3】。
4)布线方式合理,均为插接件,对于操作者的技术水平未提出特定要求,无须专业人员也可完成,且具备的防反插功能提升了操作便捷性。
5)高效的防坠系统,其配置了可调式防坠卸荷限位支顶器,具体由顶头、螺杆等相关构件组成,通过“顶头—调节螺杆—螺套—附墙支座”的连接途径可增强系统整体稳定性,并实现荷载的有效传递,在连接螺栓等相关构件作用下最终传递给建筑物,整个受力机制更为合理。
6 结语
本文从附着式脚手架提升工况和施工工况验算为出发点,介绍整体提升式脚手架布置情况、防护智能爬架平台的提升以及防坠卸荷系统原理,总结爬架智能提升系统的优点,所得结论可为同行工作者提供相关参考。
