基于三关节机械臂的堆芯支撑板异物抓取方案
2020-06-24杜林宝
胡 鑫,杨 斌,刘 涛,杜林宝,胡 娜
(中核武汉核电运行技术股份有限公司,湖北 武汉 430223)
在核电站的安装、调试、生产运行和定期检修活动中存在大量设备解体、系统打开作业,这些作业不可避免带来异物进入系统设备的风险[1]。一旦异物进入系统设备将会对核电站的安全生产和运行造成严重威胁,导致设备故障或损坏,特别是堆芯处异物极有可能导致燃料组件破损[2-3],一方面一回路放射性水平大幅提高威胁工作人员安全,另一方面浪费未燃尽燃料组件造成巨大经济损失。因此,必须对堆芯处发现异物进行异物打捞处理。
当前对于堆芯上方悬浮的异物,堆芯下栅格板上方的下沉异物,可以利用长杆远距离操作打捞工具完成异物打捞[4],也可利用水下机器人携带机械臂近距离实现异物抓取[5-6]。然而,对于堆芯支撑板上方异物,没有一种可行异物打捞解决方案。由于堆芯下栅格板与支撑板所组成圆柱形封闭区域结构复杂,而且可进入尺寸严格受限,异物抓取工具和异物抓取机器人都不可达。基于M310机组堆芯结构提出并设计堆芯支撑板上方异物抓取机械臂。
1 堆芯结构介绍
M310是国内当前主流的二代压水堆核电站,以M310堆芯为例介绍支撑板上方异物抓取区域,此区域结构复杂且空间狭小。堆芯下部堆内构件三维图如图1所示,俯视图如图2所示。
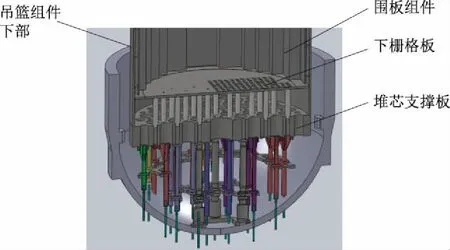
图1 下部堆内构件三维图Fig.1 3D diagram of the lower reactor internals
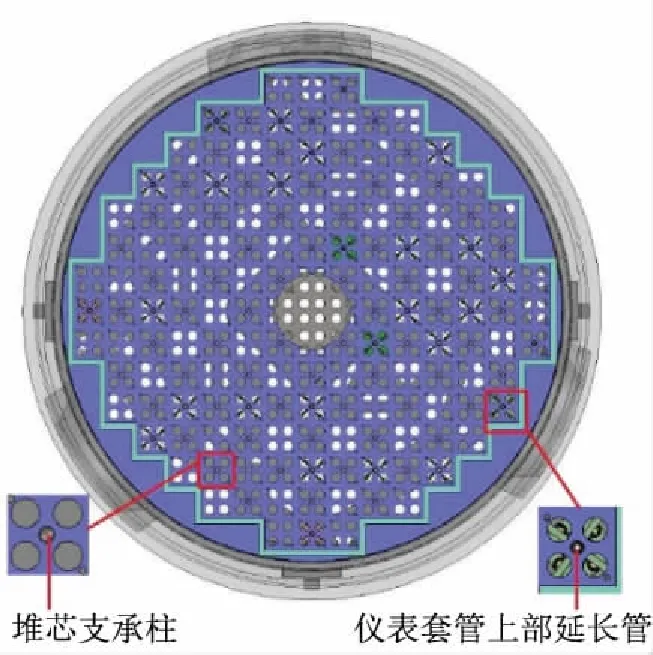
图2 下部堆内构件俯视图Fig.2 Top view of the lower reactor internals
反应堆下部堆内构件支撑板上方异物抓取的区域如图3所示,为下堆芯板组件与堆芯支撑板之间的圆柱形封闭区域,该封闭区域所形成的空间内部直径为φ3 397.2 mm,高度为691.97 mm(即下堆芯板组件和下堆芯支承板之间的距离为691.97 mm)。该区域内分布有68根堆芯支承柱和28根仪表套管的上部延长管。

图3 堆芯支撑板上方异物抓取区域Fig.3 Foreign bodies grasping region above the reactor core support plate
堆芯下栅格板分布有157组圆孔,每组包含4个圆孔,共628个圆孔,圆孔的直径为φ69.85 mm,每个圆孔距离纵横坐标轴线的距离均为50.8 mm。下堆芯板组件上每组圆孔旁边均有2个燃料组件下定位销,定位销通过螺母牢固地连接在下堆芯板组件上,并凸出47.5 mm高。仪表套管上部延长管通过M32螺母与下堆芯板组件连接在一起,仪表套管凸出下堆芯板上部最大高度为40 mm,M32螺母的对边长度为57.15 mm。堆芯支承柱与下栅格板组件之间通过M32的螺钉连接在一起,连接后仅有螺钉的头部凸出下堆芯板,M32螺钉的头部圆柱直径为φ47.3 mm,高度为31.57 mm。M32螺钉凸出部分直径和宽度均小于仪表套管上部M32螺母,只要异物抓取工具能够避开仪表套管上部M32螺母,就能避开螺钉头部。
因此,异物抓取工具要求通过628个φ69.85 mm圆孔覆盖整个异物抓取区域,而且不与燃料组件定位销、仪表套管上部M32螺母发生干涉。
2 异物抓取方案
对于异物位于堆芯下栅格板下支撑板上方情况,由于下栅格板孔直径小,而且下栅格板表面结构复杂,无法采用传统异物抓取工具或者异物抓取机器人,只能采用水下三轴机械臂通过下栅格板孔进行抓取的方案。利用加长杆使机械臂精确穿过下栅格板孔并且落坐在下栅格板上,操作人员在20m平台远程控制机械臂动作,借助摄像头观察机械臂手爪与异物相对位置,通过控制机械臂手爪运动至异物附近的适当位置,然后通过机械臂手爪锁紧实现异物抓取,最后机械臂以竖直姿态退出异物抓取区域。整个抓取过程中摄像头清晰观察周围环境和相对位置。
异物抓取设备主要由水下机械臂和辅助设备组成。总体方案如图4所示。

图4 异物抓取设备总体方案Fig.4 The overall solution of foreign bodies grasping
如图5所示,异物抓取臂采取三轴结构,关节1可360°旋转且升降运动,关节2可偏转0~α运动,关节3随动保持竖直状态,这样可保证异物抓取机械臂可覆盖下栅格板孔下方圆柱形区域。为了保证机械臂利用已有628个圆孔可覆盖支撑板所有区域,经过分块分析机械臂水平方向运动半径≥121 mm,取为121 mm,同时关节2最大偏转角不宜过大,选择为45°,那么关节2臂长为:

图5 异物抓取机械臂运动设计Fig.5 Movement design of the foreign bodies grasping arm
3 机械臂结构设计
异物抓取机械臂主要由传动箱、机械臂总成(手臂)、手爪组成,结构如图6所示。传动箱内包括升降机构、旋转机构、摆动机构;机械臂总成为开放、三段式纯机械结构,包括关节一、关节二、关节三。

图6 异物抓取机械臂结构Fig.6 Structure of the foreign bodies grasping arm
异物抓取机械臂总成可保持竖直姿态经过下栅格板孔达到堆芯支撑板上方空间。传动箱为封闭式箱体,包括三轴输出动力源及相应电气控制组件。传动箱通过有线拖缆与地面上的控制上位机和电源相连。控制上位机接收控制终端操作指令,解析运算后传输至机械臂控制箱执行。
关节一具备旋转和升降动作,关节二具备偏转动作,关节三跟随关节一和关节二动作,永远保持竖直状态。关节三保持随动,既可以减少一个自由度控制,又便于在不发生干涉情况下实现异物抓取。
3.1 旋转动作
异物抓取机械臂的旋转机构,由内轴、被动轮、主动轮、同步带、主动电机、减速箱、轴承座及支架组成。该机构为机械臂的旋转动作提供旋转动力。
安装在支架上的电机及减速箱带动主动轮,通过同步带驱动被动轮回转,实现机械臂的回转。减速箱的大减速比,保证了主动端的低速大扭矩;通过伺服电机的精确控制,实现机械臂的周向精确定位。此结构设计使得机械臂可以穿过下栅格板φ69 mm的孔洞,同时使位于下栅格板与堆芯支撑板之间的三段轴臂可周向旋转。
3.2 升降动作
异物抓取机械臂的升降机构,由传动箱上端盖、直线模组安装支架、直线模组、直线模组滑块、直线模组驱动电机及减速箱、轴承座及支架组成。该机构为机械臂的升降运动提供动力。
传动箱上盖通过加长杆与水上支撑定位设备连接,为机械臂起到初始定位与(下栅格板)孔间移动的作用。直线模组安装支架安装在传动箱上盖底部,直线模组、安装支架、传动箱上盖均精确安装定位。直线模组通过带减速箱的伺服电机驱动,其滑块与机械臂轴承座联接上下移动。伺服电机提供直线模组的动力源,机械臂的升降位移通过其精准控制。
3.3 偏转动作
如图7所示,异物抓取机械臂的偏转机构由关节一和关节二组成,包括偏转电机、电机连接座、联轴器、内轴、外壳、齿轮1、支撑环等。偏转电机通过螺钉固定在电机连接座上;偏转电机通过联轴器与内轴上端连接在一起;将内轴套入机械臂外壳内并将电机连接座安装在关节一外壳上;齿轮1穿入关节一外壳下端的孔内并套在内轴下端上,利用紧定螺钉将齿轮1和内轴固定在一起;为了保证齿轮1相对于关节一外壳转动顺畅,在齿轮1和关节一外壳的配合面之间设计有支撑环。

图7 异物抓取机械臂偏转动作机械结构Fig.7 Deflection structure of the foreign bodies grasping arm
关节二主要包括关节二外壳、内轴、齿轮2、齿轮3、齿轮4、支撑环和密封圈等组成。内轴穿入关节二外壳内,齿轮3和齿轮4分别套在关节二外壳两端的孔内并固定在内轴的两端。齿轮2固定在关节二外壳上端的连接孔内,与关节二外壳成为一体,齿轮2与齿轮3相啮合。
关节一偏转电机转动后即可驱动齿轮1转动,再通过内轴传动到齿轮2、齿轮2啮合传动到齿轮3,从而带动关节二摆动。
3.4 手爪
抓爪采用水下气缸驱动四连杆机构的工作原理,其结构简单,可靠性高。抓爪结构及合拢状态如图8所示。手爪的三根手指可起到自动定心的作用,避免了夹取条形异物需要调整手爪方位的困难。手爪和第三关节的连接可快速拆装,可根据特定的异物换用其他形式的手爪。基于同样原理设计二根手指的抓爪,用于抓取不同类型的异物。

图8 抓爪结构及合拢状态Fig.8 Gripper structure and its close statue
3.5 定位结构
由于异物抓取机械臂在水下20 m处作业,长度过长会导致下方波动过大,因此,必须设置相对固定机构使机械臂不发生晃动。在传动箱下方设置定位装置即密封压盖(见图9)使机械臂坐落在支撑板上,该密封压盖设有一段圆锥段,利于压盖中间的圆柱体导入下栅格板孔内,圆柱体的外径略小于φ69 mm的板孔径,取为φ68 mm。圆柱体导入后,可使机械臂相对下栅格板不发生水平摆动。机械臂依靠自重在重力作用下,能可靠地压在下栅格板上。机械臂在定位装置的作用下,可相对于下栅格板孔可靠定位且不随意移动。

图9 机械臂的定位结构Fig.9 Fixed structure of the foreign bodies grasping arm
整个机械臂穿过下栅格板上φ69 mm孔坐落在下栅格板上时,必须避让下栅格板上的燃料组件定位销以及仪表套管上部M32螺母凸出部分。定位结构外圈尺寸涵盖燃料组件定位销,而避开仪表套管上部M32螺母凸出部分。φ69 mm孔中心距离定位销外圆最大距离为60.3 mm,定位销高度为47.5 mm。因此,定位结构的内径设计为φ130 mm(半径为65 mm),高度为50 mm,机械臂在定位的过程中能够有效避开障碍物。
4 模拟试验
异物抓取机械臂样机如图10所示,在堆芯下部构件模拟体上进行异物抓取试验,在5个不同位置摆放4种异物,并借助摄像系统完成抓取过程。

图10 异物抓取机械臂样机Fig.10 The prototype of the foreign bodies grasping arm
20次试验异物都被成功抓取,螺钉和端子异物抓取成功如图11所示,说明异物抓取机械臂功能可靠而且有效,可以覆盖支撑板上方所有区域。

图11 不同异物抓取成功Fig.11 The successful grasping of different foreign bodies
5 结论
对于堆芯支撑板上方异物,不存在一种可行异物打捞解决方案。针对此复杂空间域提出一种基于三关节机械臂的异物抓取方案,机械臂利用下栅格板孔进入异物抓取区域,再结合旋转、升降、偏转和抓爪开合动作实现复杂空间的异物抓取。设计、加工制造一套复杂空间异物抓取机械臂,在堆内构件模拟体上进行不同位置多种异物抓取试验,机械臂都成功抓取异物,验证了异物抓取方案的可行性,以及异物抓取机械臂的安全性、可靠性。