机载雷达在黄河稳封期冰厚测量中的应用
2020-06-23罗红春冀鸿兰郜国明牟献友张宝森
罗红春,冀鸿兰,郜国明,牟献友,张宝森
(1.内蒙古农业大学水利与土木建筑工程学院,内蒙古 呼和浩特 010018;2.黄河水利委员会黄河水利科学研究院,河南 郑州 450003)
黄河宁蒙河段每年冰期历时4个多月,独特的冰塞冰坝常会壅高河道水位,诱发冰凌洪水。冰厚是冰凌理论分析[1]、冰情模拟[2]及冰情预报[3]的关键物理指标,其测量工作对黄河防凌减灾具有重要意义。目前,冰厚测量技术主要包括接触式和非接触式两类[4]。接触式中,原位钻孔可信度最高,但工作效率低,不能满足大范围冰厚连续测量需求;热电阻丝[5]测冰对温度有一定要求;当前较为先进的测冰技术有声呐测冰[6]和雷达测冰[7]。依靠声波和电磁波测冰虽不破坏冰盖,但设备必须贴在冰面上才能进行。非接触式测冰技术中以卫星遥感测冰[8]为主,但在黄河上适用性不高。探地雷达测冰利用雷达波来回时长对冰厚进行计算,能快速完成大范围冰厚测量,现已在海冰[9-10]及极地冰川[11-12]中得到广泛应用,但在河冰湖冰上尚处于起步阶段。现有的探地雷达冰厚监测技术一般采用人工拖曳或车载的方式,使探地雷达沿预设路线进行测量。刘之平等[13-14]将冰水情一体化双频雷达测量系统应用在黑龙江漠河段及黄河内蒙古托克托段;张宝森等[15]利用探地雷达对黄河头道拐站的冰厚进行了测量;曹晓卫等[16]利用探地雷达对黄河什四份子弯道和巨河滩大桥桥墩冰厚进行了探测;刘晓凤[17]将雷达测冰技术应用在松花江上,测验效果良好。为提高冰厚测验效率,Arcone 等[18-19]利用直升机悬挂探地雷达对阿拉斯加湖泊及育空河等河流进行了测试,但直升机测冰并不贴近科研实际。采用无人机搭载探地雷达不仅能提高冰厚测量的效率,节约成本,且无需人员上冰,解决了常规作业安全性差的问题。目前,国内尚缺乏机载雷达对黄河冰厚测量的研究成果。拖曳式探地雷达仅能在盛冰期施测,对于初封期及开河期则无能为力。机载测冰雷达技术能填补凌汛期全时段冰厚测量的空白,其高效无损的探测特点,能快速对较大范围的冰厚进行探测,将是未来冰厚非接触式探测技术的发展趋势。
1 研究区概况及测冰原理
1.1 研究区域
什四份子弯道位于黄河内蒙古段下游(图1)呼和浩特市托克托县河段,北纬40°17′39″,东经111°2′53″。河道呈“Ω”形走势,曲率大,弯道进出口方向夹角约120°,河底比降约0.1%,河宽200~600 m。河道冰期时间多出现在11月下旬至翌年3月中下旬,持续100余天,1998—2015年平均流凌、封河及开河日期分别为11月22日、12月16日和3月17日。在封冻期,什四份子弯道凹凸两岸岸冰的生长,极大地束窄了河面宽度,同时有效输冰河宽在弯道顶冲断面急剧缩小,严重降低水流的输冰能力,而使其成为初始卡冰位置[20]。此外,在弯道卡口段(断面1至断面3),河道横向断面束窄,加上垂向冰层的热力或水力增厚,明显降低了水流过流能力,水流和冰凌在弯道内不断聚集,极易形成冰塞,壅高上游水位,严重时将引发冰凌洪水。因此,对弯道卡冰区域的冰厚探测,对于河道槽蓄水量的分析及凌汛洪水的研判具有现实意义。
1.2 试验方案
2019年1月10—13日在什四份子弯道进行了冰厚原型观测,试验共设定4个测量断面(图1,顺水流方向依次为断面1、断面2、断面3、断面4,断面4为弯道出口处的清沟断面,距离断面3下游约300 m)。除清沟断面外,利用钻冰机及冰穿对其余3个断面沿河宽方向进行原位钻孔,每孔间隔20 m(近岸部分设为10 m),3个断面共计58孔。利用ADCP测量冰孔下垂线流速、水深及冰花厚(ADCP需穿透冰花层才有数据进而能反映冰花厚),单孔测流历时60 s并做均值处理,同时用量冰尺(测量精度毫米级)量测冰厚、水浸冰厚等指标。利用机载雷达记录各冰孔的坐标信息,使其飞行航线与预设断面重合,保证冰厚观测过程能覆盖整个断面,测冰现场如图2所示。飞行试验共计2个测次,分别从断面1起飞至断面3回航、断面2起飞至断面4回航。由于人工目视误差,冰厚测量断面并非直线,但对测验结果无影响。将雷达实测冰厚与量冰尺实测冰厚的结果进行对比分析,评价机载雷达在黄河冰厚测量中的应用效果。
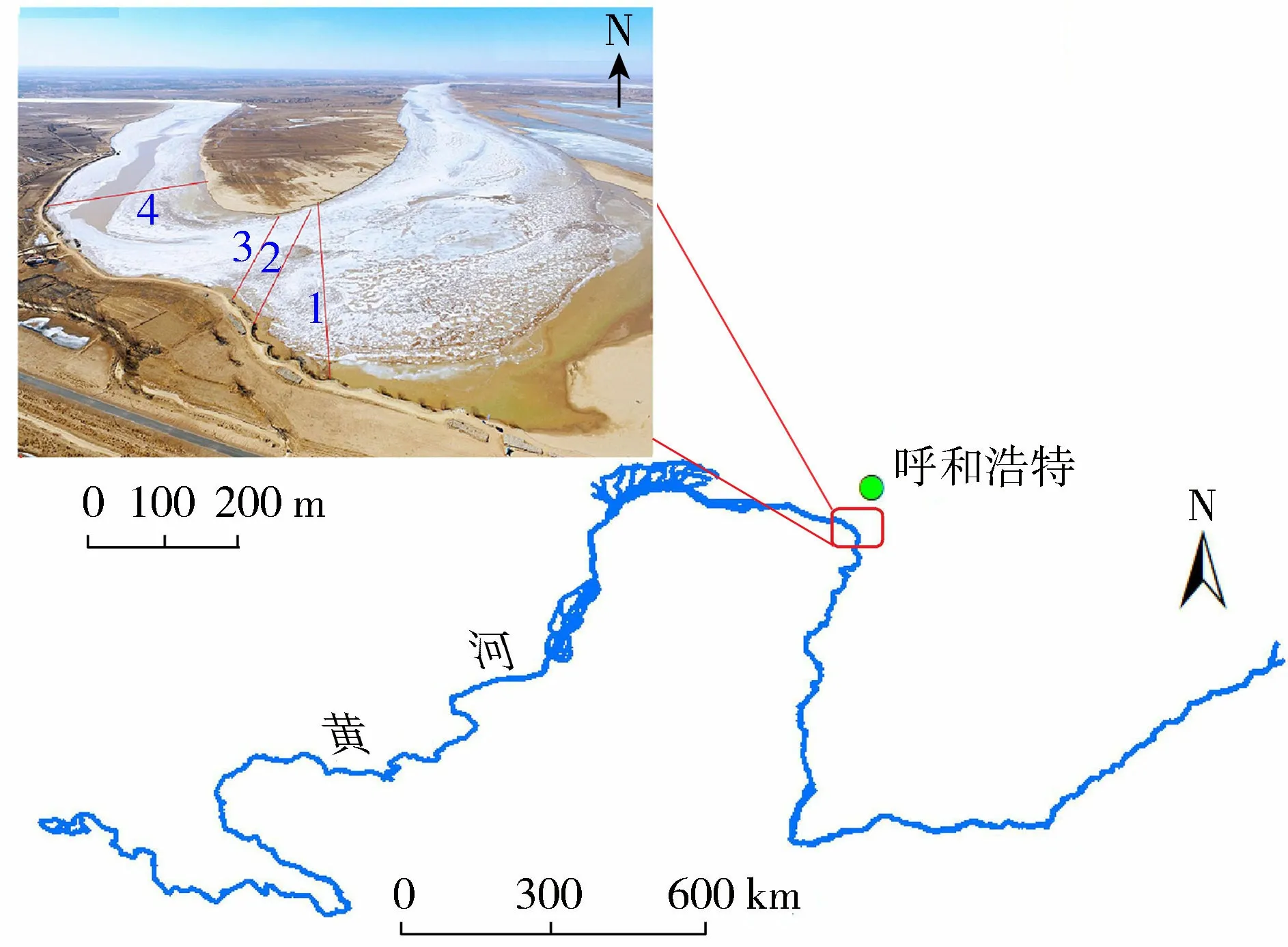
图1 什四份子弯道

图2 机载雷达测冰
1.3 测冰原理
试验采用的机载雷达为飞航式测冰雷达IGPR-30系统。IGPR-30系统是一款无人机搭载的探地雷达系统,可快速检测河湖海冰、水库冰及高原冰湖的冰层厚度及其空间分布信息,解决了黄河凌汛期冰厚监测过程的低效高危问题,提供了河冰测量全新的技术手段和解决方案,特别适于对大面积的冰面进行连续探测,具有体积小、重量轻、功耗低等特点。雷达中心频率400 MHz、探测厚度6 m以上、探测精度mm级、遥控距离小于2 km,能在零下30°低温条件下连续工作15~30 min。为降低雷达信号的沿程衰减、保证飞行器的姿态稳定,试验飞行高度(距冰面)宜控制在5 m以内,飞行环境在5级风速以下。
自然界中各类介质介电常数的不同,电磁波在每种介质中的传播速度不一,雷达测冰主要通过发射天线向冰层发射电磁波,由接收天线分别接收来自空气-冰界面、冰-水界面返回的电磁波,通过电磁波在不同介质中的传播时间来达到间接测量冰厚的目的。冰厚测验中常遇到的介质为:空气、冰、水、底层沉积物,介电常数分别为1、3~4、81和5~40。依据电磁波传播理论,电磁波在不同介质中的传播速度只与介电常数有关,因此,不同介质介电常数的差异,为探地雷达进行冰厚测量提供了可能。探地雷达发射的电磁波在空气-冰-水介质中的传播速度不同,接收到的信号可反映不同介质的界面位置,进而可以计算冰层厚度。探地雷达测量冰厚时,电磁波从发射到返回的时间称双程走时,通常假设来回时间相同,所以计算冰厚时只用到双程走时的一半[15]。试验采用的机载雷达与普通人工拖曳探地雷达的测冰原理基本一致,只不过在原有的探测基础上增加了空气层。冰厚计算公式为
(1)
式中:H为冰层厚度,cm;ΔT为双程用时,ns;v为雷达波在冰内传递速度,cm/ns;c为电磁波在真空中的传播速度,c=30 cm/ns;ε为冰的介电常数,淡水冰一般取3.2。
利用雷达测冰时,首先需对冰体介电常数进行率定。通过选取典型冰孔(本试验选取了4个测点,涵盖浅滩与主槽部分),测量雷达波在冰内的双程用时,利用实际冰厚推算雷达波在冰内的传递速度,进而得到实际冰的介电常数(本试验结果平均为3.2,断面冰厚测量以此为基准)。
2 结果分析
2.1 雷达信号解译
应用机载雷达在黄河什四份子弯道开展冰厚测验,并对测冰结果进行解译(图3)。雷达波形经滤波增益处理后,由于不同介质的介电常数差别较大,因此雷达波对于介质的区分度较高。当无人机悬停在冰面(岸冰)上时,雷达信号维持不变;当无人机正常工作时,雷达信号出现了明显的分层现象,特别是在介质条件发生变化时,雷达信号的“突变”效果最为明显,如试验中遇到的清沟;由于只有空气-水界面,因此雷达波的面层仅有一层。显然,机载雷达能清楚地对空气-冰、冰-水界面进行区分,同时对于地物、冰水交界、冰岸交界及清沟也能准确识别。通过层位追踪(一般选取负峰)手段,将空气-冰界面、冰-水界面沿整个断面进行追踪识别,辅以人工修饰,两层间的距离即为所测冰层厚度。此外,在机载雷达起飞-降落过程中,通过摄像头采集同步视频,断面冰厚的测量细节被良好地记录下来,可帮助数据提取及冰厚变化过程分析。机载雷达一次飞行(一个测次)时间控制在6~9 min,极大地提高了河道冰厚的测验效率。
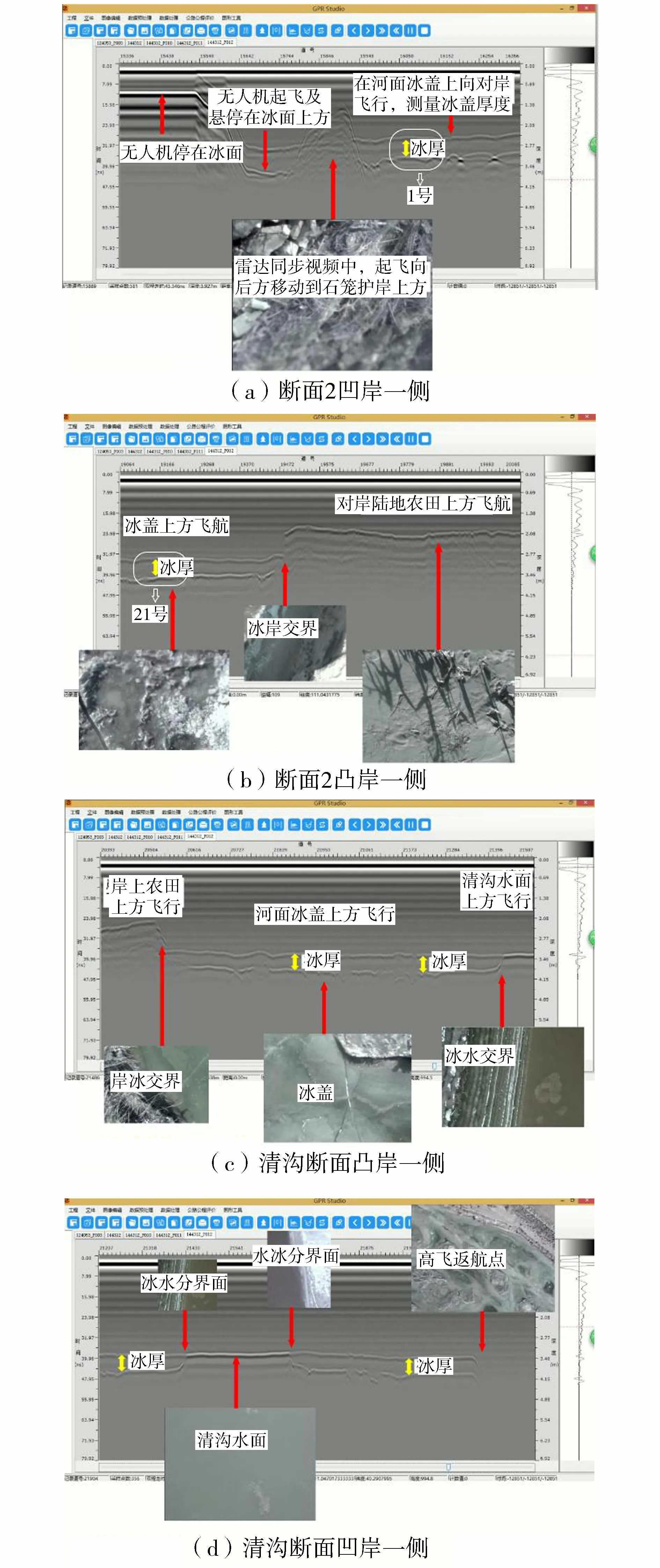
图3 雷达测冰结果解译
2.2 测验效果
以第一个测次为例(断面1起飞、断面3回航),对比分析量冰尺实测冰厚与雷达实测冰厚,如图4所示。结果表明,断面1冰厚和断面3冰厚的分布特征及测量效果既有相似又有区别。相似之处是:两个断面靠近弯道凹岸一侧,雷达测冰的精度相对于凸岸一侧较差,弯道凸岸一侧主河槽冰厚测验的效果明显要优于凹岸。区别是:断面3中部为局部堆冰区,雷达测冰结果出现明显的偏差,在整个断面中基本属于精度最低的部分,而断面1误差较大点的空间分布无明显规律,体现了断面冰盖结构分布的不均匀性。不考虑误差偏大的个别点,沿断面方向,雷达测验结果与量冰尺实测结果的吻合度逐渐提升,这与河流冰盖的封冻形式有关。什四份子弯道有两个主河槽,分布于河道两侧,靠近凹岸及河道中部的河槽形成的是立封冰盖(本年度不严重),而凸岸一侧则形成平封冰盖。立封冰盖由于冰体表面的不平整性,当雷达在飞行过程中进行扫描时,其飞行姿态、位置及高度决定了误差的大小;另外,量冰尺所测冰厚是冰盖下单点的冰厚,而冰盖底部大多不规则,量冰尺量测的位置不一样也会给测量结果带来误差,这也正是断面1雷达实测值与量冰尺实测值的差值忽正忽负的原因。对于相对平整的平封冰盖,雷达探测结果的精度得到了有效的提升,冰厚绝对误差控制在5 cm以内。总体上,冰厚测量结果对比中,雷达实测的冰厚多数都大于量冰尺实测的冰厚,特别是断面3,这是因为雷达测冰时,会将堆积层的冰厚也计算进去,而人工用冰尺量测则不会考虑冰层上部堆积的部分,因此,飞航式测冰雷达对于立封冰盖的测量结果一般偏大,对平封冰盖的测量结果精度较高。
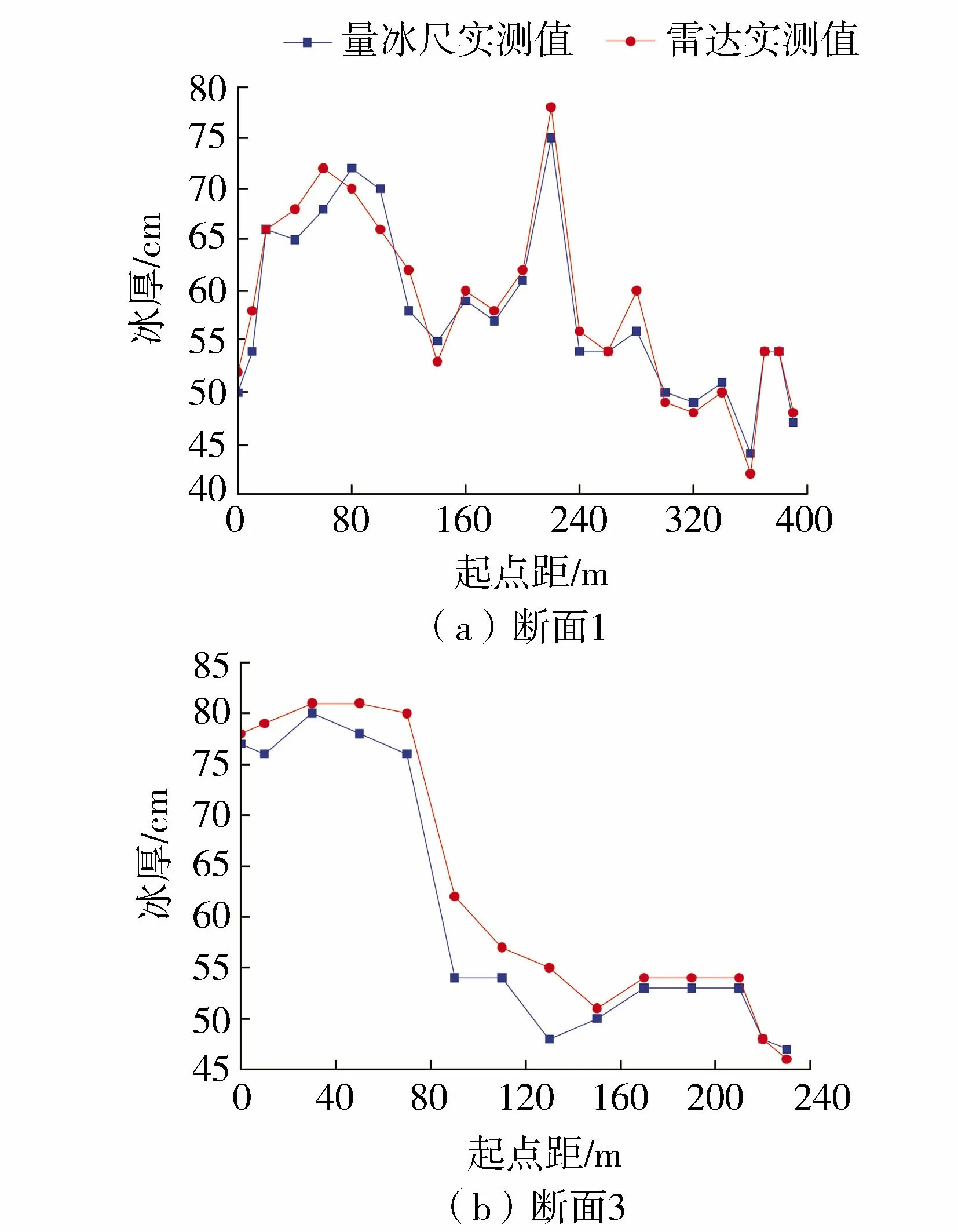
图4 冰厚测量结果对比
冰厚测量精度对比分析共设置58个测点,精度分析结果如表1所示。机载雷达测冰结果与量冰尺实测的冰厚吻合度总体较高,误差在10%以内的测点数占总测点数的91.4%;误差在10%~15%的测点主要来源于断面2和断面3的中部,该处堆冰不平整是误差的主要来源(图5(a));误差超过15%的测点出现在断面2凹岸滩地冰盖上(图5(b)),这可能是测量误差所致。由此可见,机载雷达在黄河冰厚测验中,对平封冰盖的测验效果明显高于立封冰盖,当河道立封情况较为严重时,机载雷达的应用能力不高。实际上,当河道严重立封(如冰坝)时,拖曳式探地雷达也不能发挥作用,人工钻孔更加困难,且应急机动能力差。如果对精度要求不是绝对严格,机载雷达探测黄河冰厚这一技术是值得推广的:一方面,机载雷达基本可以量化断面冰厚的分布信息,另一方面保证了冰期作业的安全,是未来非接触式测冰技术的发展趋势。
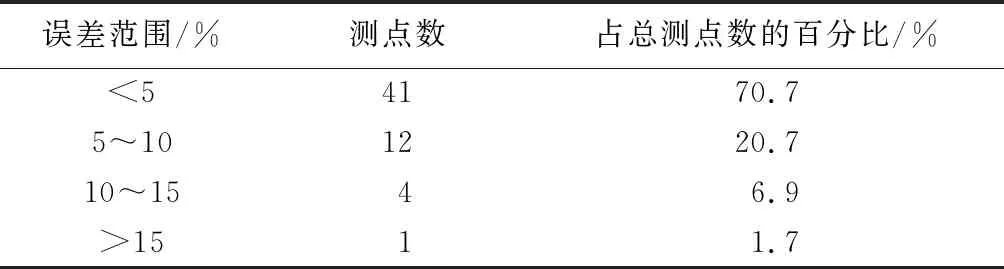
表1 冰厚精度分析结果
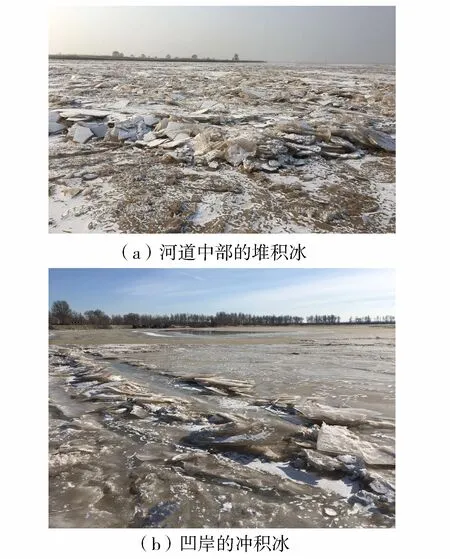
图5 河道凹岸及中部冰情
对上述58组冰厚数据进行误差分析,依据SL 59—2015《河流冰情观测规范》,冰厚测量的误差可由标准差和随机不确定度表示[21]。观测值的标准差S为
(2)
式中:Δi为第i个观测值与近似真值之差;n为测次数。
随机不确定度X(置信水平取95%)为
X=ZaS
(3)
式中:Za为相应于a置信水平的置信系数,当观测次数足够多时,取值为2,对应置信概率为95%。
计算结果表明,雷达实测冰厚与量冰尺实测冰厚的标准差为0.039 4 m,随机不确定度为7.88%<10%,满足SL 59—2015《河流冰情观测规范》对冰厚测量的要求。

图6 各断面冰厚分布
通过后处理软件提取机载雷达测试的全断面冰厚信息(图6)。结果表明,什四份子弯道断面1、断面2、断面3的冰厚分布区间及趋势具有较强的一致性。凹岸一侧冰厚在50~90 cm之间,明显大于凸岸一侧冰厚(50~60 cm)。由ADCP测流试验结果,凹岸一侧水流平均流速在0.8 m/s左右,凸岸一侧水流则为1.0 m/s,说明此时弯内主流偏向凸岸,流速的增大降低了冰厚的热力生长。同时,上游来冰量增加,冰块在凹岸一侧上爬下插发生堆积,使得凹岸冰盖形成立封冰盖,进一步增大了凹岸的冰层厚度,说明机载雷达实测冰厚结果与实际现象相符。分段来看,出弯前,由断面1至断面3冰厚分布结果,凹凸岸两侧冰厚变化不大但分布不均匀。冰厚分布与水深及流速有关,凹岸水深大流速小,冰盖易增厚。弯顶处(断面3)河道中心冰厚开始变薄,这是因为凸岸主流逐渐向凹岸转移,在断面3中心处逐渐与清沟相连,流速偏大,冰厚生长受限。出弯后,水流动力削弱,断面4两侧冰厚分布较为一致,平均冰厚约50 cm。沿河宽方向,离清沟越近,冰厚越小,这是由于清沟常常是水内冰聚集的区域,水内冰生成时会释放一定的热量,进而削弱了冰厚的生长;同时,清沟表面的水-气热交换促进冰盖不断向清沟中心延伸。从图6可看出,雷达测冰时出现了个别明显的“突变点”。分析其原因,一方面,受冰层底部不均匀影响,冰厚波动;另一方面,雷达自身也附带一定的测量噪声,这些因素均会对测冰结果产生一定影响。总而言之,利用机载雷达测冰能反映断面冰厚的具体分布,量化冰厚空间信息,对河道冰情的解释程度较高。
在整个冰期,冰盖厚度基本呈增大—稳定—减小的变化趋势,流凌和开河时河冰的生消过程只能定性描述。利用飞航式测冰雷达能快速进行冰厚探测,不受凌汛期不同阶段的限制,能量化整个冰期的冰凌生消过程。对于河流冰塞冰坝,雷达测验的精度值得商榷。封河期及开河期的冰层内部结构不断变化,冰晶组构、冰内气泡含量、冰内含水含沙量等因素均会影响冰体的介电常数[22-23],改变雷达测冰的双程时间,进而引起冰厚测验结果的偏差。因此,对河冰不同阶段冰体介电常数的标定及雷达在封开河时期的测验效果需要进一步研究。
3 结 语
机载雷达能快速对河流稳封期的冰层厚度进行探测,极大地提高了冰厚测验效率。机载雷达在平封冰盖上应用效果良好,绝对误差在5 cm以内,对立封冰盖冰厚测验的精度偏低,对堆积冰的测量误差最大。机载雷达整体测验结果中,冰厚观测标准差为0.039 4 m,随机不确定度为7.88%,满足冰厚观测规范要求。由于黄河冰凌的复杂性,冰盖生消受水力、热力、河势等多因素影响,总体上,机载雷达在黄河冰厚测验中的应用效果较好,在未来河冰厚度的无损连续监测方面值得推广。
